Plugin Settings
Select RoboDK Settings 
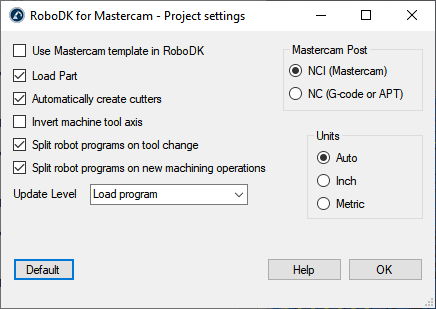
Among other things, you can modify the following options:
1.Use the Mastercam template instead of RoboDK template (the 3D navigation and color templates in RoboDK will match Mastercam style). In RoboDK, make sure to uncheck Ignore changing settings from 3rd party applications in the menu Tools➔Options➔Other to allow this template in RoboDK.
2.Load and update the part in RoboDK every time you post a new machining operation. Only visible solids and surfaces will be loaded.
3.Automatically create tool cutters. In this case, new tools will be created automatically with respect to the first tool of the robot (tool holder) and the TCP will be offset by the overall tool length with respect to the tool holder.
4.Checking the option Invert machine tool axis allows you to automatically account for your tool Z axis pointing towards the inner side of the tool (instead of pointing toward the outside).
5.Use NC files (such as APT or G-code) instead of NCI files. RoboDK can read the following files to generate robot simulations and programs:
a.NCI files (default option): Loads Mastercam native toolpath in RoboDK. This is the preferred method for most operations.
b.NC files (G-code files). Allows you to load canned drill cycles (longhand) using the RoboDK machine definition.