RoboDK CNC User Interface
The RoboDK CNC allows feeding large programs to a robot controller.
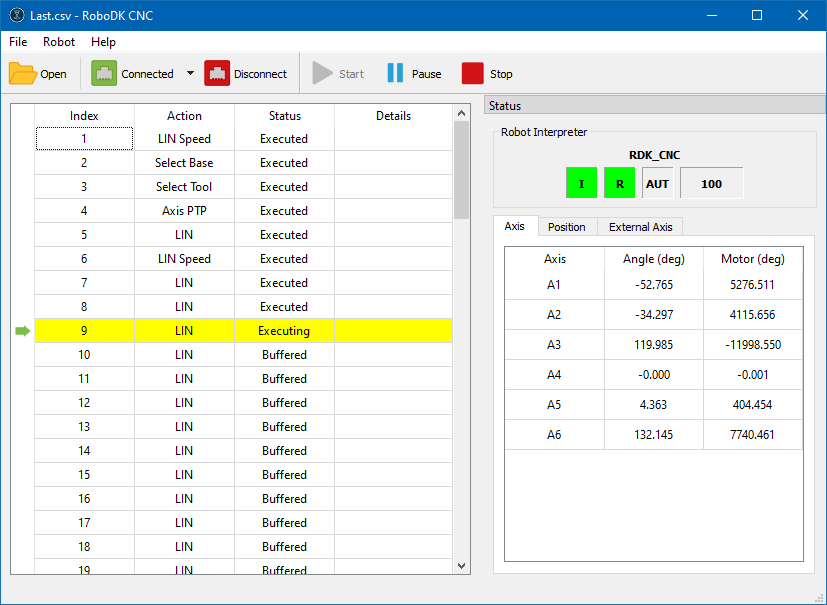
The main window of RoboDK CNC contains the following elements:
1.Main Menu
2.Toolbar
3.Instruction Table
4.Status Panel
The Main Menu and Toolbar operations overlap.
| Open | Open a CSV file generated using the RoboDK CNC post processor. |
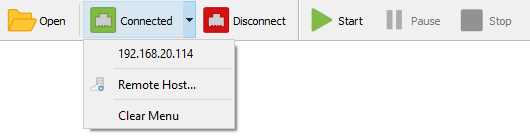
| Connect | This icon indicates that there is currently no connection to the robot control system. Pressing this button will open the connection history menu. |
| Remote Host... | This action will bring up the New Connection dialog box to connect to the IP address and port of the remote robot control system. |
| Connecting | This icon indicates an attempt to connect to the robot control system. |
| Connected | This icon indicates a successful connection to the robot control system. |
| Disconnect | This action immediately interrupts the connection to the robot control system. Be careful, the robot may continue to move even after the RoboDK CNC has been disconnected. |
| Start | Start performing the robot's movements with the very first instruction. Or continue running a previously started program. |
| Pause | Suspend execution of a previously started program. |
| Stop | Cancel program execution and stop the robot's movements. |









The Status Panel contains information about the currently running KRL program, readiness and speed override indicators, and information about the current robot position.
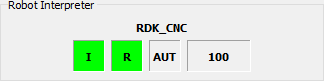
The Robot Interpreter panel contains four indicators:
Robot Drives and Motion |
| The robot's drives are turned on, and the robot is ready to make movements. |
| The robot actuators are switched off and the robot is not ready for operation. | |
KRL Program Status |
| The robot program is not loaded. |
| The robot program is loaded and ready for execution. | |
| The robot program is being executed. | |
| The robot program was interrupted due to an error. | |
| The robot program was fully executed. | |
Robot Controller Mode |
| The current operating mode of the robot control system. It can take the following values: T1, T2, AUT, EXT. |
Speed Override |
| The program execution speed override value in percent from 0 to 100. |








