Connect to the tracker
The IP of the tracker is needed to properly set the communication in RoboDK. Make sure that VXelements is not running and follow these steps to verify the communication with the tracker:
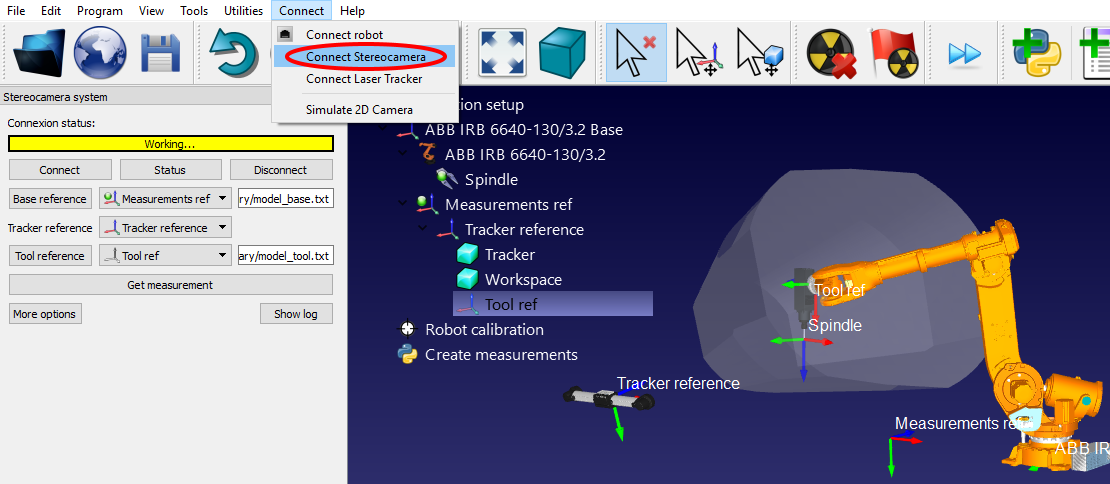
a.Select the menu “Connect➔Connect Stereocamera”. A new window should open.
b.Enter the “Base model” and the “Tool model”, as text files (generated in the previous section). These are the position of the targets that define the reference frame and the tool frame respectively.
c.Select the “Connect” button.
d.When the connection succeeds, you must provide the Base and Tool models as text files (.txt).
You will see that an integrated version of VXelements starts and, after a few seconds, you should see a green message showing “Ready” if the connection is successful. The VXelements windows can be closed and the connection will remain active. If the connection does not succeed you must make sure that no VXelements processes are running behind the scenes in the Windows Task bar or the Task manager (select CTRL+ALT+DEL to force stop the “VXelementsApiImplementation” process), then, select Connect in RoboDK to try again.