Introduction
Industrial robot arms are highly repeatable but not accurate, therefore the accuracy of an industrial robot can be improved through robot calibration. The nominal accuracy of a robot depends on the robot brand and model. With robot calibration you can improve robot accuracy by a factor of 2 to 10.
With RoboDK you can calibrate 6-axis robot arms and you can obtain accuracies up to 0.050 mm for small robots and 0.150 mm for medium sized robots. The accuracy you can obtain after calibration highly depends on the robot model and the setup. With RoboDK you can’t calibrate 5-axis or 7-axis robot arms.
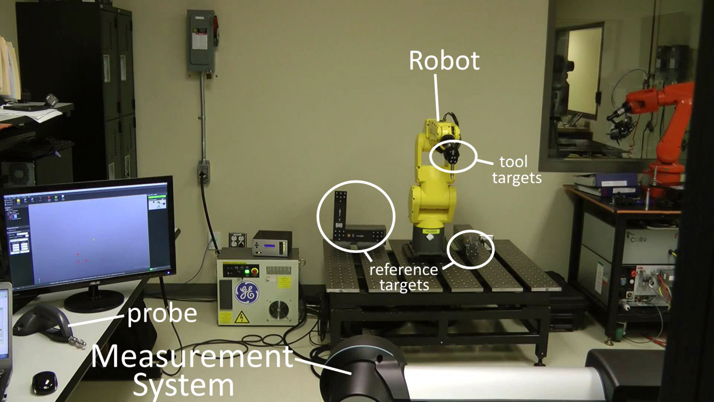
A measurement system is required to calibrate a robot. RoboDK can be used to calibrate the robots as well as to generate accurate robot programs (this includes filtering the programs and using RoboDK’s offline programming engine). RoboDK can also be used to test the accuracy of the robot before and after calibration through ballbar testing or robot milling.
Robot calibration can remarkably improve the accuracy of robots programmed offline, also known as Off-Line Programming (OLP). A calibrated robot has a higher absolute as well as relative positioning accuracy than an uncalibrated one.