Measuring the base
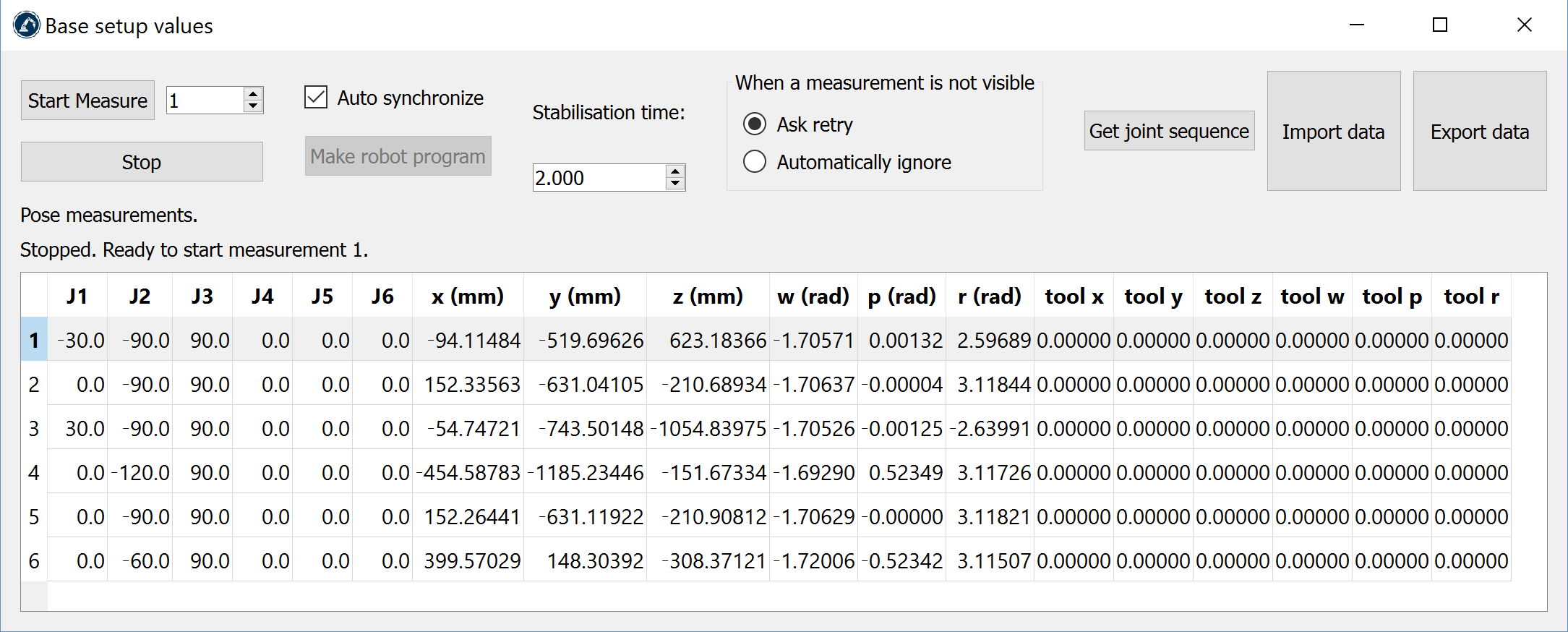
These measurements can be performed anywhere in the tool flange if you measure the same target for all the 6 measurements. To start the measurements, select Measure in the Base setup section. The following window will open. Then, select Start Measure and the robot will move sequentially through the scheduled measurements.
Close the window when the measurements are completed and the Measurements reference frame will be updated with respect to the robot base frame. If you did not select any reference frame, you can add a reference (select Program➔Add Reference Frame) and place it under the robot base reference (Drag & Drop in the item tree).
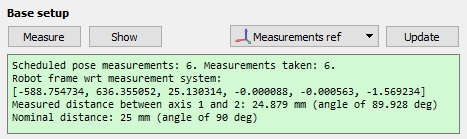
The summary will show the position and orientation or the robot reference frame with respect to the calibration reference frame ([x,y,z,w,p,r] format, in mm and radians)
Once this step is completed you can accurately display the workspace of the tracker with respect to the robot in RoboDK in real time.