Results
Once the calibration is completed you can analyze the accuracy improvement by reading the statistics provided by RoboDK. To display these statistics, open the robot calibration window (double click the icon Robot Calibration). The summary window in the validation section will display the errors before calibration (nominal kinematics) and after calibration (calibrated kinematics). Two tables are provided, one shows statistics concerning position errors and the other one shows distance errors:
●Position errors: The position error is the accuracy with which the robot can reach a point with respect to a reference frame.
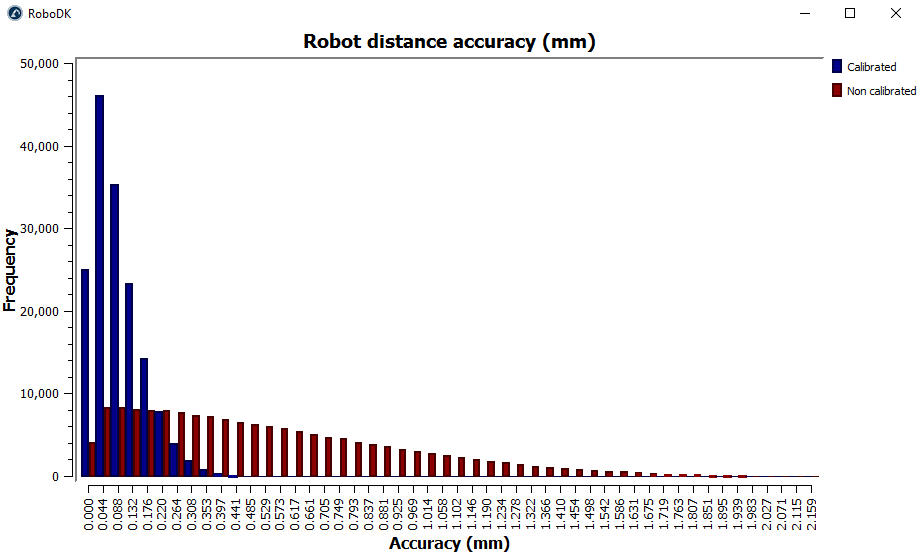
●Distance errors: The distance error is obtained by measuring the distance error of pairs of points. The distance between two points seen by the robot (obtained using the calibrated kinematics) is compared with the distance seen by the measurement system (physically measured). All combinations pairs are taken into account. If you took 315 measurements you will have 315x314/2= 49455 distance error values.
The statistics provided are the mean error, the standard deviation (std) and the maximum error. It is also provided the mean plus three times the standard deviation, which corresponds to the expected error for 99.98% of all the measurements (if you take into account that errors follow a normal distribution).
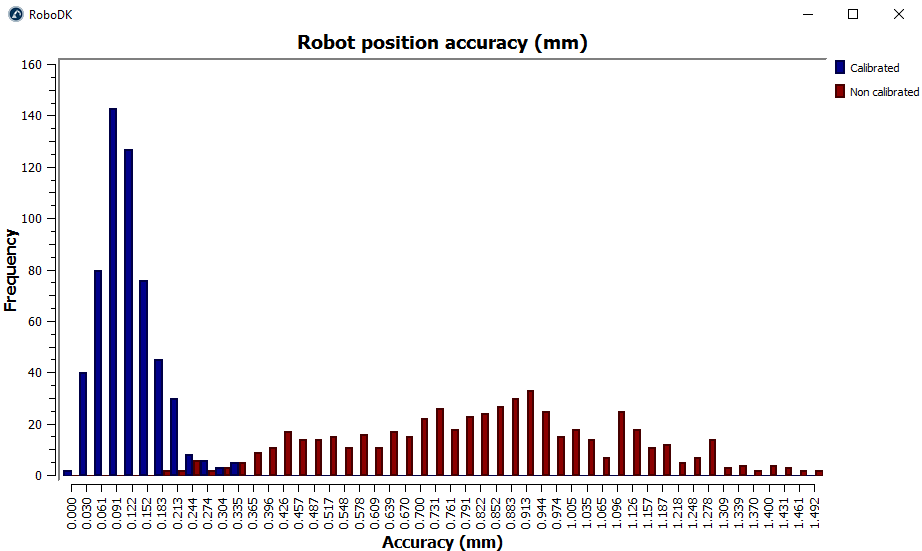
Select Show stats and two histograms will show the distribution of the errors before and after calibration, one histogram for position accuracy and the other showing distance accuracy. The following images correspond to the 315 validation measurements used in this example.
Finally, you can select Make report and a PDF report with the information presented in this section will be generated.