Import Points
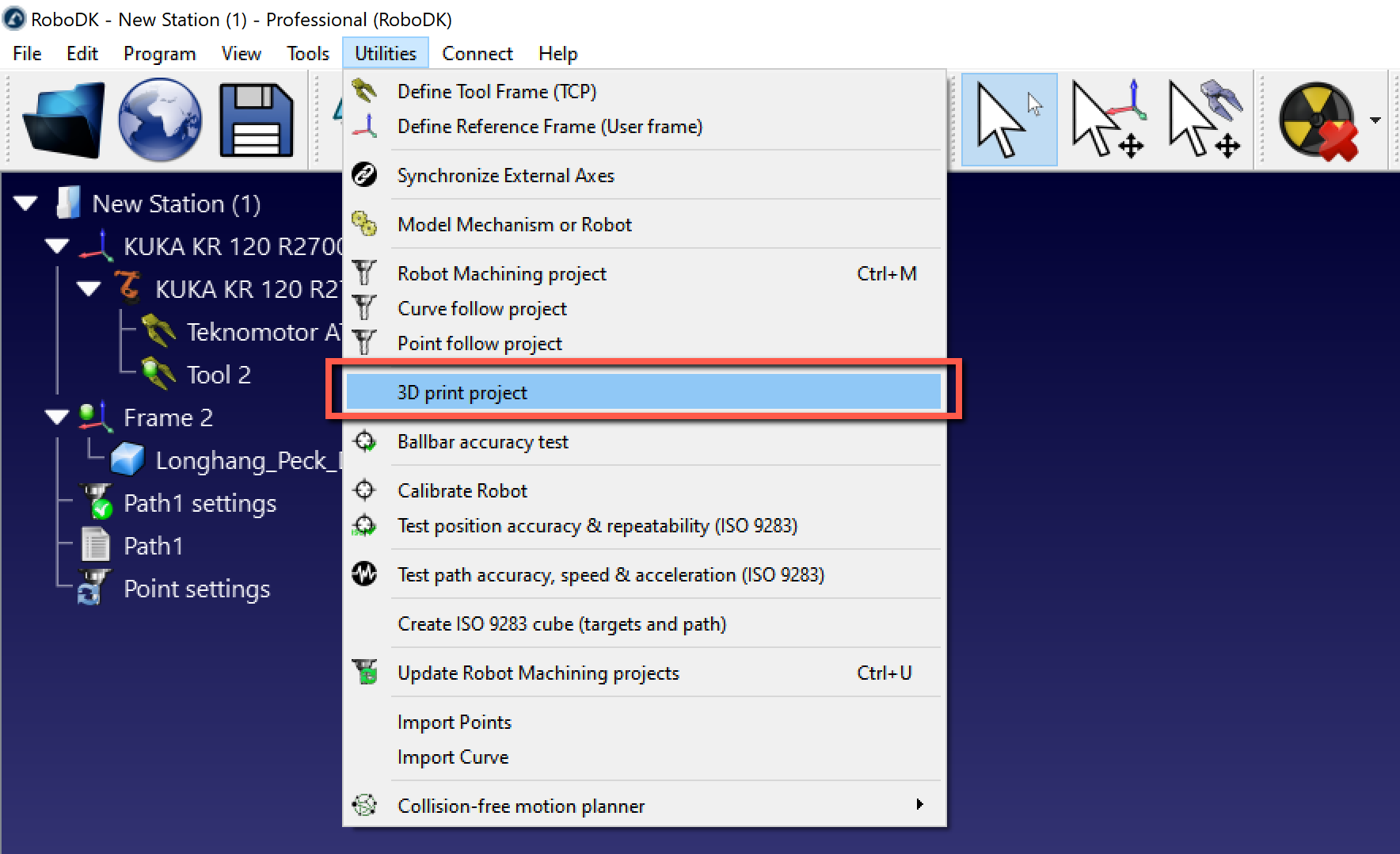
A list of points can be imported from a text file or a CSV file by selecting Utilities➔Import Points. A new item will appear in the station showing the points as an object.
Tip: Drag and drop a text file (.txt format) to the RoboDK window to automatically import it as a list of points.
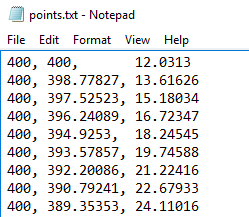
The file can be a text file with the 3D coordinates of each point of the curve. Optionally, the orientation of the Z axis of the tool can be provided as an i,j,k vector.
Note: Points in parametric object files (such as STEP and IGES files) are automatically imported by default (more information available in the STEP/IGES import section).
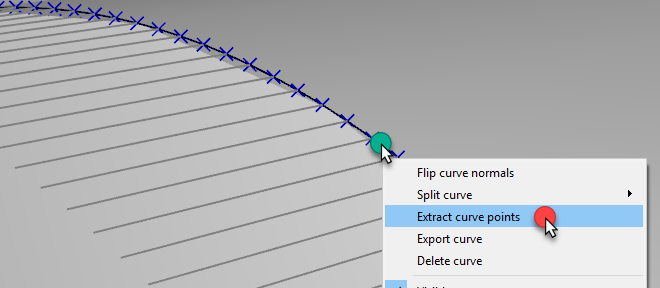
Optionally, existing curves of an object can be converted into points by right clicking a curve, then, selecting Extract curve points.