Given a preferred tool orientation, the robot can have a certain freedom to turn around the Z axis of the tool. This allows the robot to solve the program avoiding robot singularities, joint limits and making sure all points are reachable. By default, RoboDK allows the tool to rotate up to +/-180 degrees around the TCP axis by increments of 20 deg.
It is recommended to constrain this rotation depending on the application. For example, it is possible to enter +/-90 degrees to constrain the allowed rotation by half. Decreasing this parameter will also reduce the processing time to obtain the program.
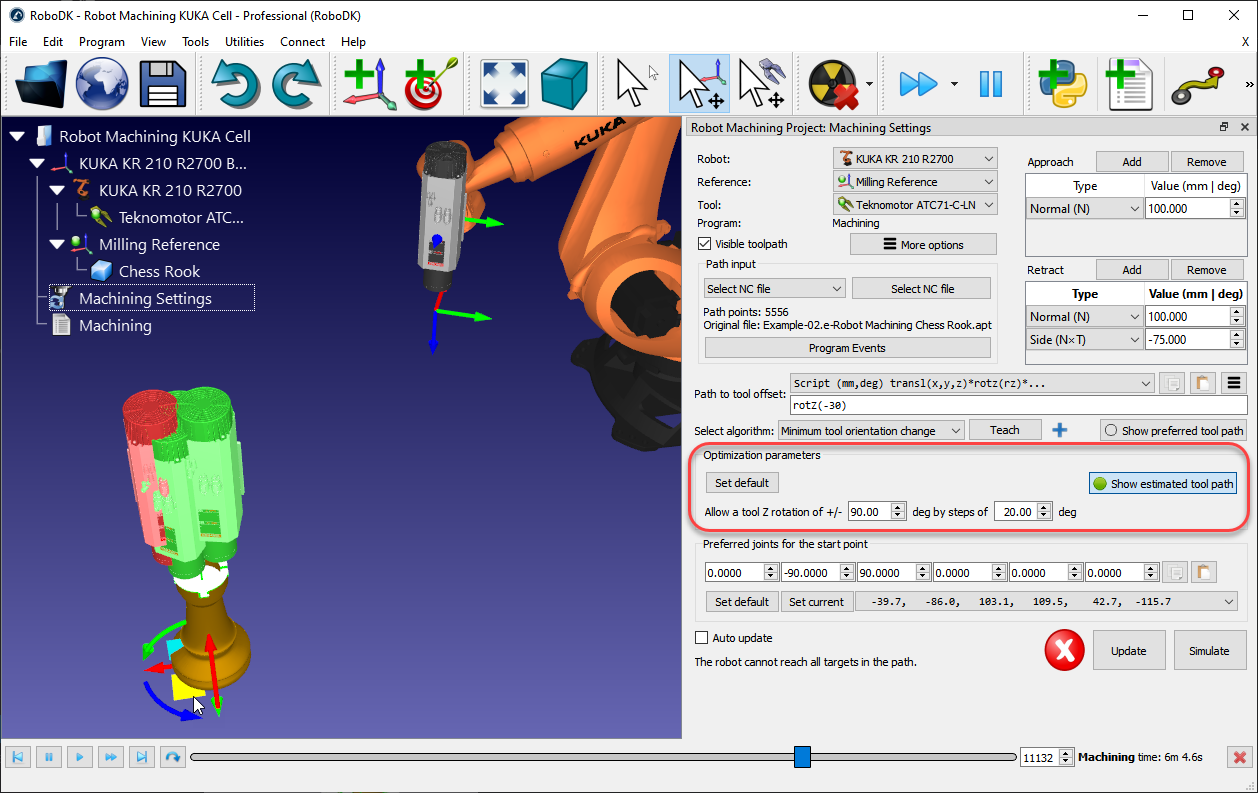
Tip: Select Show estimated toolpath to see the reachable points (in green) and the unreachable points (in red). The reachable points might be rotated with respect to the preferred toolpath to make the targets reachable by the robot.
If some points of the path are not reachable, it is recommended to rotate the reference frame or to be more permissive with the tool Z rotation. The reference frame can be moved by holding the Alt key and dragging the coordinate system to better fit the part inside the robot workspace.
Note: The estimated toolpath will be displayed when the reference frame or the TCP are modified (if the Auto update option is checked). This can guide you find the optimal location for your robot machining operation.
Tip: Smaller step values allow a more gradual reorientation of the tool as it is crossing a singularity. On the other hand, it might take longer to calculate the toolpath.
Note: Set the allowed rotation around Z to 0 degrees to fully constrain the tool according to the preferred orientation. For simple applications where the robot is working far from singularities or axis limits you can also set this rotation to 0 deg. This is useful for large 3D milling application where the tool should mostly keep the same orientation.