Preferred Configuration
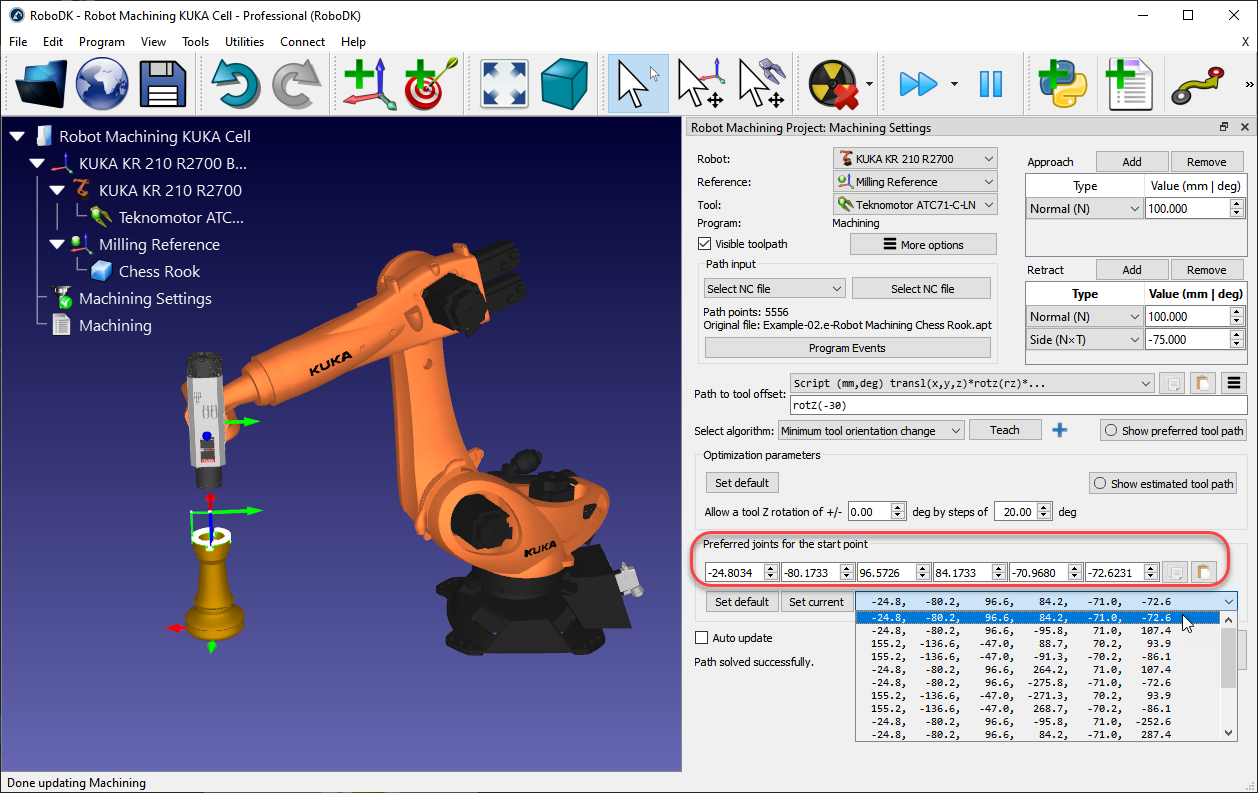
RoboDK automatically selects the start configuration that is closer to the preferred start joints (Preferred joints for the start point). From that point, the robot will follow linear movements, so the robot configuration will not change.
A dropdown menu will display all the possible solutions to start the program. If required, select a preferred robot joint configuration, and select Update to recalculate the program.
Tip: This option allows you to create a program with a specific configuration such as non-flip, elbow up and front flags. This is also particularly useful if you need to pre-wind a multi-turn joint, such as Joint 6, before the path. This joint will then unwind during the path without reaching its limit, thus allowing this trajectory to be entirely done in one single go.