Robot Holds object
It is possible to program a robot when it holds the object/toolpath with the tool with the robot while the manufacturing operation takes place. This is useful for glue dispensing or polishing applications for example. This type of robot programming is also known as Remote TCP.
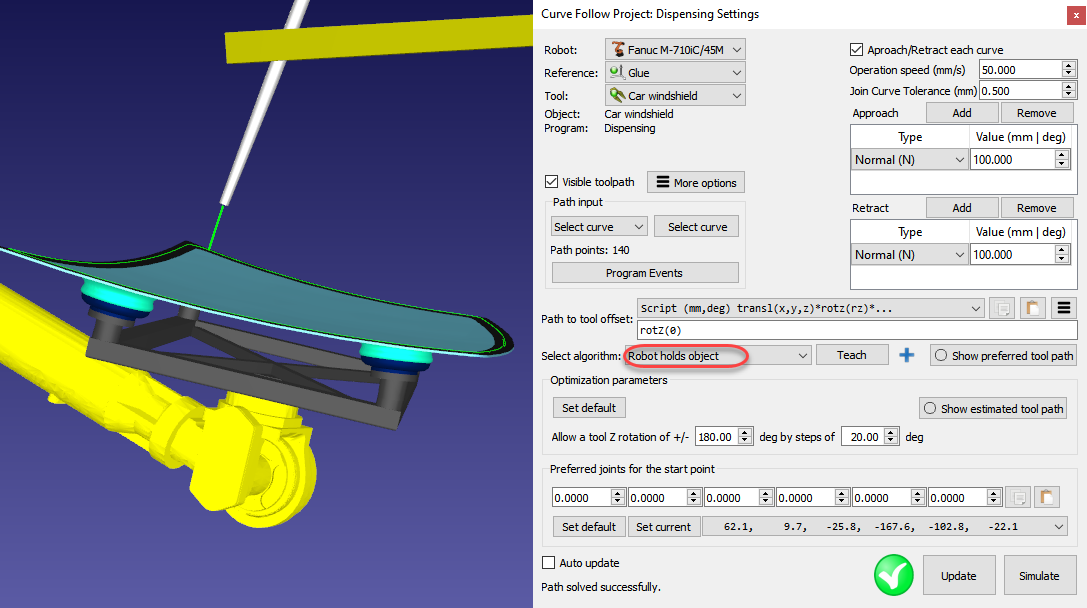
Select Robot holds object in the Select algorithm dropdown to properly place the toolpath on the TCP reference. The other settings are the same as having a Machining Project with a constant tool orientation.
Important: It is strongly recommended to have the points of the toolpath close to each other if the tool orientation is changed.
Video: This example shows a glue dispensing application using a Fanuc robot: https://www.youtube.com/watch?v=YrepmoQtNnA.
More information available in the RoboDK Add-In for Autodesk Fusion section.