Set Tool Frame
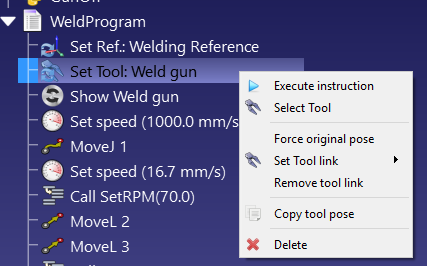
Select Program➔ 
The reference frame is a variable also known as ToolData (ABB robots), UTOOL (Fanuc robots), TOOL (for Motoman robots) or $TOOL (for KUKA robots).
Note: Specific controllers support setting tool frames using a numbered tool (such as Fanuc and Motoman controllers). In that case, the name of the tool frame can end with a number (such as Tool 4 to set the tool index 4).