Comau robots
This section of the documentation provides an overview of typical operations when you use a Comau robot, such as generating programs from RoboDK and loading them in the Comau robot controller.
Transfer a robot program
This section will guide you to load a program into the Comau robot controller.
Follow these steps to load a program form via FTP into program memory.
1.Under the connecting tab for the robot, correctly configure the IP address. If the FTP username and password are not the default values, you can configure them under “more options”
2.When you wish to transfer a program, simply right click on the program and select “Send to robot”
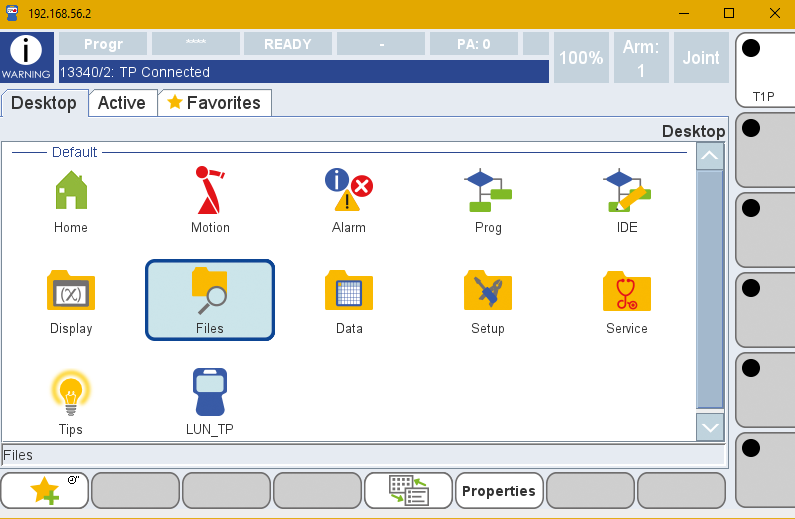
3.On the robot controller, navigate to “Files” on teach pendants main menu
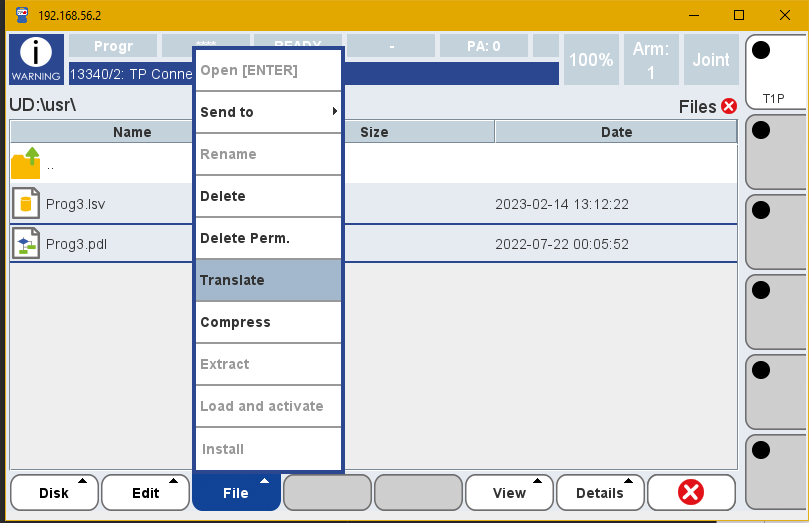
4.Select the PDL program and it’s corresponding LSV if needed and click on File->Translate to convert the program to it’s corresponding compiled version
5.The compiled files can now be loaded into memory and run through the “Prog” option on the main interface
When using RoboDK with a virtual robot in RoboShop, you may want to increase the maximum number of simultaneous FTP connections, otherwise, the virtual teach pendant will disconnect every time you transfer a file. This can be achieved by opening a terminal on the virtual robot and performing the following actions.
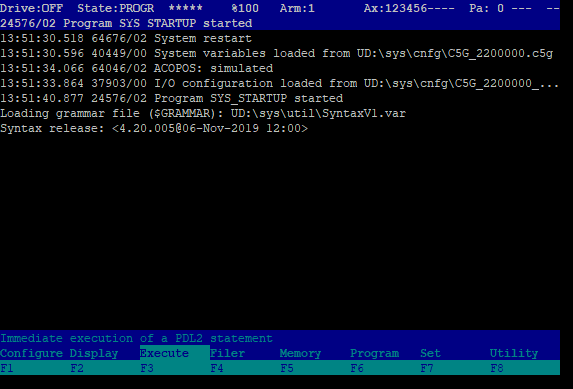
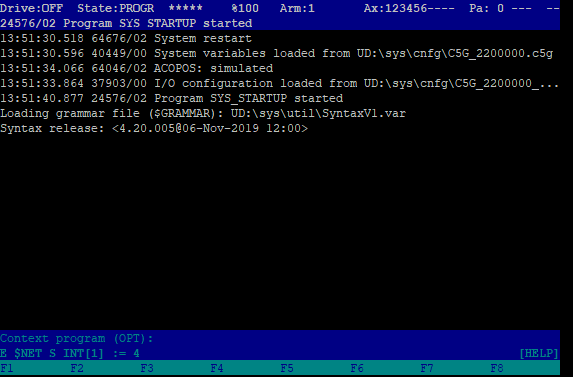
Navigate to the terminal in Roboshop and follow these steps inside the robot’s terminal:,
1.Select Execute (F3)
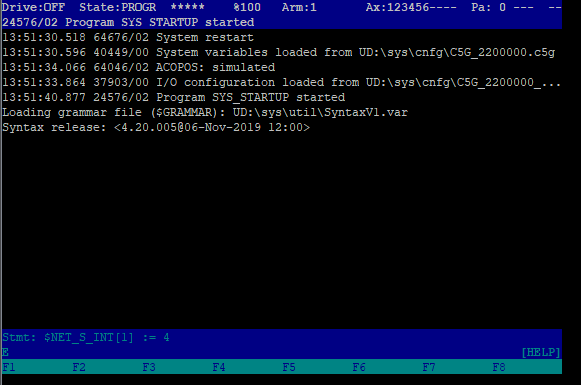
2.Type “$NET_S_INT[1] := 4”
3.Press “Enter” to confirm the statement
4.Press “Enter” a second time to execute the statement.
Post Processor
When generating robot programs for Comau robots it is important to verify if your robot is configured for MODAL or NODAL programs.
For Nodal programs, select the following post processors by right clicking on the robot and then clicking on the button “Select post processor”
●Comau Nodal
For Modal programs, select the following post processors by right clicking on the robot and then clicking on the button “Select post processor”, then choose one of the following post processors:
●Comau C5G
●Comau C5G Joints
Driver
You can use online programming features with Comau robots. For the online programming features to work you should setup the driver on the Comau robot controller side by running the driver PDL program file.
You should follow these instructions to set up the Comau driver for RoboDK:
1.Transfer the RoboDKdriver.pdl file to the Comau robot controller.
2.Manually start the program on the robot (converts the robot into a server).
3.Connect to the robot from RoboDK.
The communication port used by default is 1102, however, you can change it in the RoboDKdriver.pdl file.