Navigation offcanvas
- Basic Guide
- Getting Started
- Interface
- Options Menu
- Robot Programs
- Robot Manufacturing
- RoboDK CAM
- Tips and Tricks
- General Tips
- Add-ins
- Add-ins
- Components Add-In
- File Manager
- Palletizing
- Smart Motion
- Computer Vision
- Curve Utilities
- Point Utilities
- Display Panel
- OPC-UA
- Record
- Realistic Robot Simulation (RRS)
- Safety Zones
- Surface Pattern Generator
- Augmented Reality
- Welding Add-In
- RoboDK CNC
- IO Monitor Plugin
- Blender Export
- IsaacSim Bridge
- Game Controller
- Plugins for CAD/CAM
- RoboDK Plug-Ins for CAD/CAM Software
- RoboDK Plugin for BobCAD-CAM
- RoboDK Plugin for FeatureCAM
- RoboDK Add-In for FreeCAD
- RoboDK Add-In for Fusion 360
- RoboDK Plugin for hyperMILL
- RoboDK Add-In for Inventor
- RoboDK Plugin for Mastercam
- RoboDK Plugin for MecSoft
- RoboDK Add-In for Onshape
- RoboDK Add-In for Rhino
- RoboDK Add-In for Siemens Solid Edge
- RoboDK Add-In for SolidWorks
- Collision Detection
- Examples
- Robot Tips
- ABB robots
- Brooks robots
- Comau robots
- Denso robots
- Dobot Robots
- Fanuc robots
- Han’s robots
- Hanwha robots
- JAKA robots
- KEBA Controllers
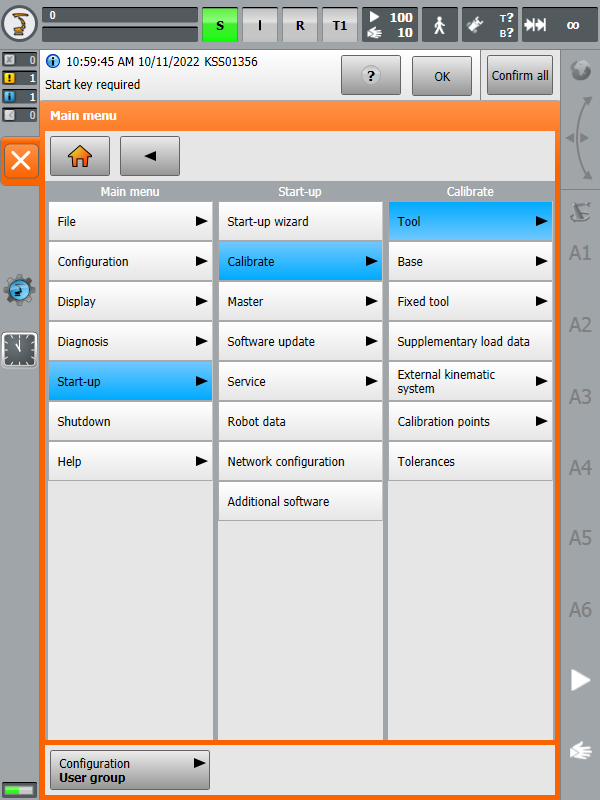
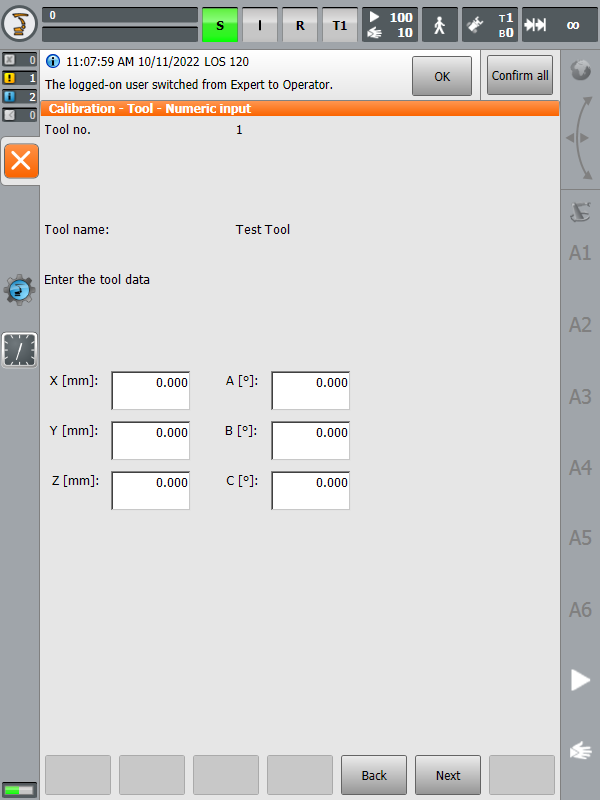
- KUKA robots
- Mecademic
- Yaskawa Motoman robots
- Omron-TM Robots
- Siemens Sinumerik
- Universal Robots
- Post Processors
- Virtual Reality
- RoboDK API
- Robot Drivers
- Accuracy