Run a Program on the Mecademic controller
Once your RoboDK simulation is ready, you can generate a program offline that can be executed by the Mecademic robot controller (script file). You can also generate a PY file that will run the program on the robot controller from a remote computer.
Follow these steps to generate an offline program (a script or a PY file) from your robot simulation:
1.Right click a program (Prog1 in this example)
2.Select Generate robot program F6
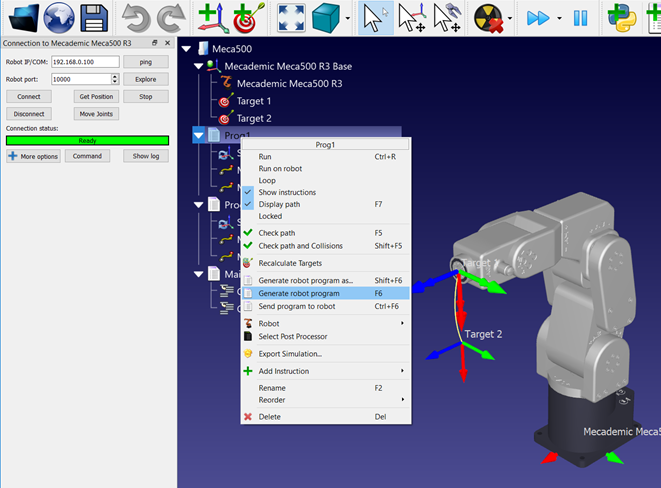
The program will be displayed in a text editor (this behavior can be changed in the menu: Tools➔Options➔Program).
How to load a script file
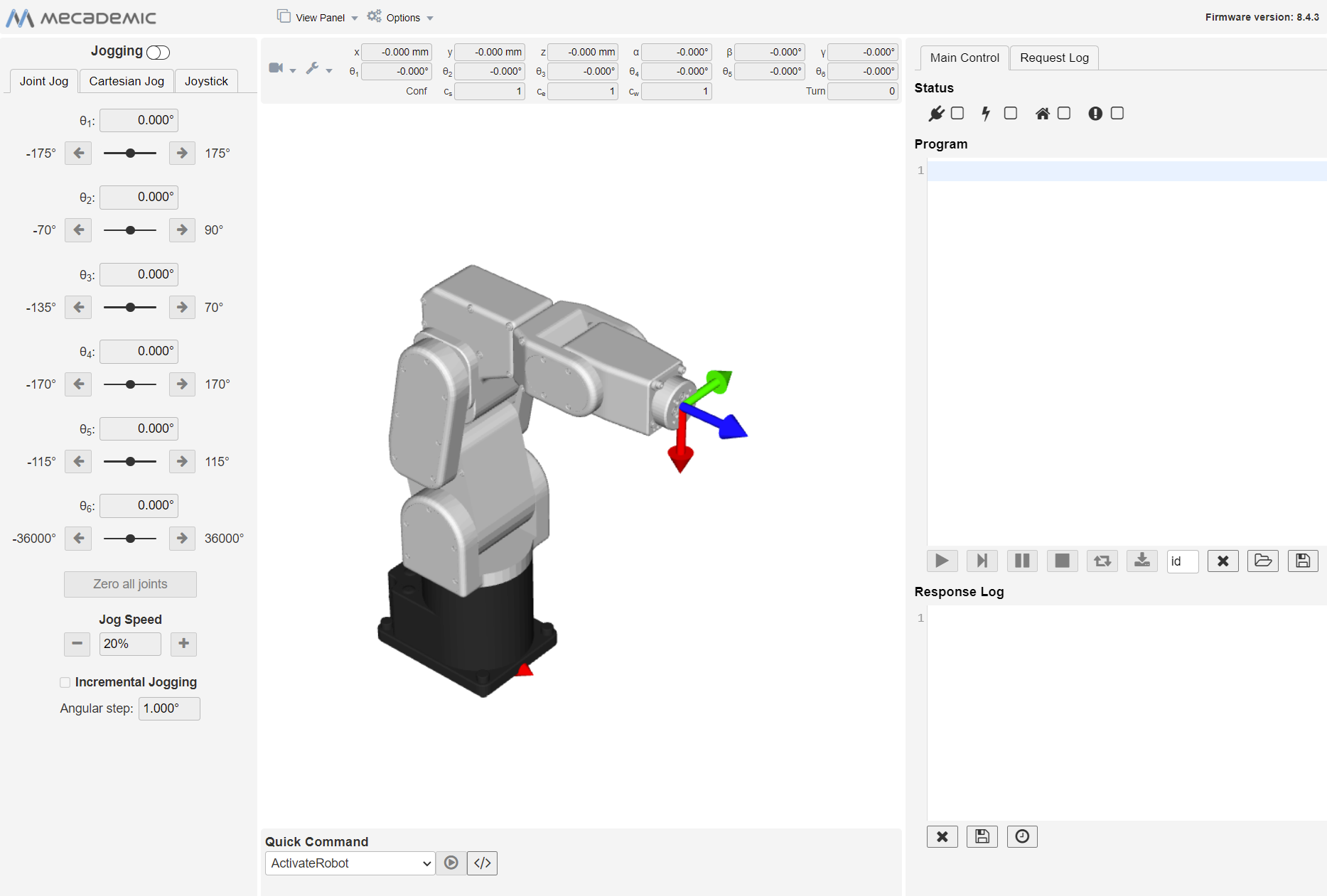
Once you obtain a program/script file you can run the program or load it on the controller using the web interface. Follow these steps to run the program using the Mecademic web interface:
1.Open the Mecademic web interface on you web browser (type the robot IP address).
2.Copy and paste the script content into the Program editor.
3.In the Status bar, Connect, Activate and Home your robot.
4.Click on the play button to run the program.
5.Click on the save button to upload the program to the robot.
How to run a PY file
You can generate a Python file that automatically connects to the Mecademic robot using the Mecademic TCP/IP interface and runs the program remotely.
You should select the post processor called Mecademic Python. The following steps summarize the procedure to run a PY file on the Mecademic.
1.Right click the program and select Select Post Processor
2.Select Mecademic Python
3.Right click the program and select Generate robot program (F6)
4.Save the generated PY file on disk.
5.Open and run the PY file in your IDE or run it directly from your python environment.