Update Pulses per degree information
Yaskawa Motoman robots require knowing the ratio of pulses per degree for all robot axes to convert angular joint values to pulses and vice-versa. RoboDK automatically generates programs with the correct pulse information if the pulses per degree ratio is properly provided in the robot parameters.
You can load the ALL.PRM file from your Yaskawa Motoman controller in RoboDK to automatically extract the pulses/degree ratio. The ALL.PRM file should be available when you perform a full controller backup. Following steps demonstrate the procedure to be used in this case:
1.Open your robot in RoboDK.
2.Drag and drop the ALL.PRM file in RoboDK to open it.
3.Accept the changes and you should see the pulses/degree information updated for your robot. You may see a warning message if you didn’t select the correct robot.
4.The pulses/degree information is saved with your RDK project file. You can also save the robot by right clicking on it and selecting Save as… and replace this robot in other projects by right clicking on a robot and select Replace robot.
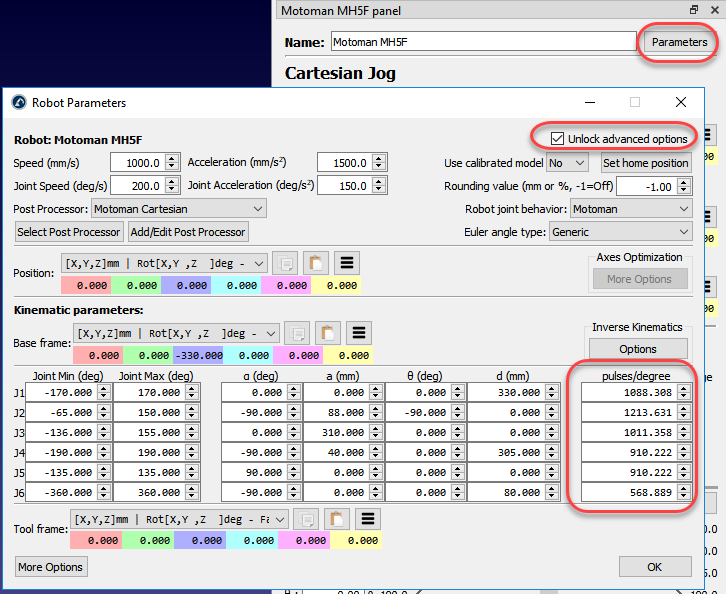
Follow these steps to verify if this information is available for your robot (or to update it):
1.Double click your Yaskawa Motoman robot in RoboDK
2.Select Parameters
3.Select Unlock advanced options
4.Review or update the pulses/degree values for each joint
Once this information is updated you can generate your programs with the correct pulses/degree information.