Transfer a file via USB
Using the default post processor, you will obtain your program as a ZIP file. You should prepare a USB drive with the following characteristics to properly load the file on the robot:
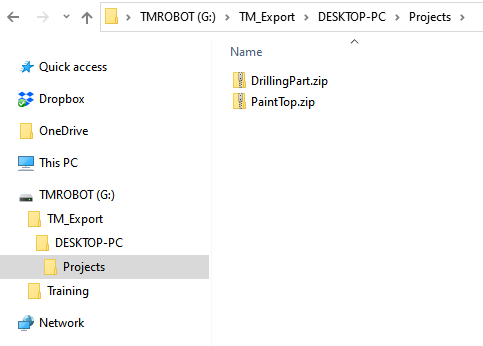
1.Name the USB drive TMROBOT (this step is important).
2.Create a new folder called TM_Export at the root of your drive.
3.Create a new folder inside TM_Export with your project (any name should work).
4.Create a new folder inside the previous folder called Projects.
5.Place the ZIP programs inside the Projects folder.
Follow these steps to load the program in TMFlow:
1.Save the ZIP file created from RoboDK to the USB drive in the folder following the previous steps.
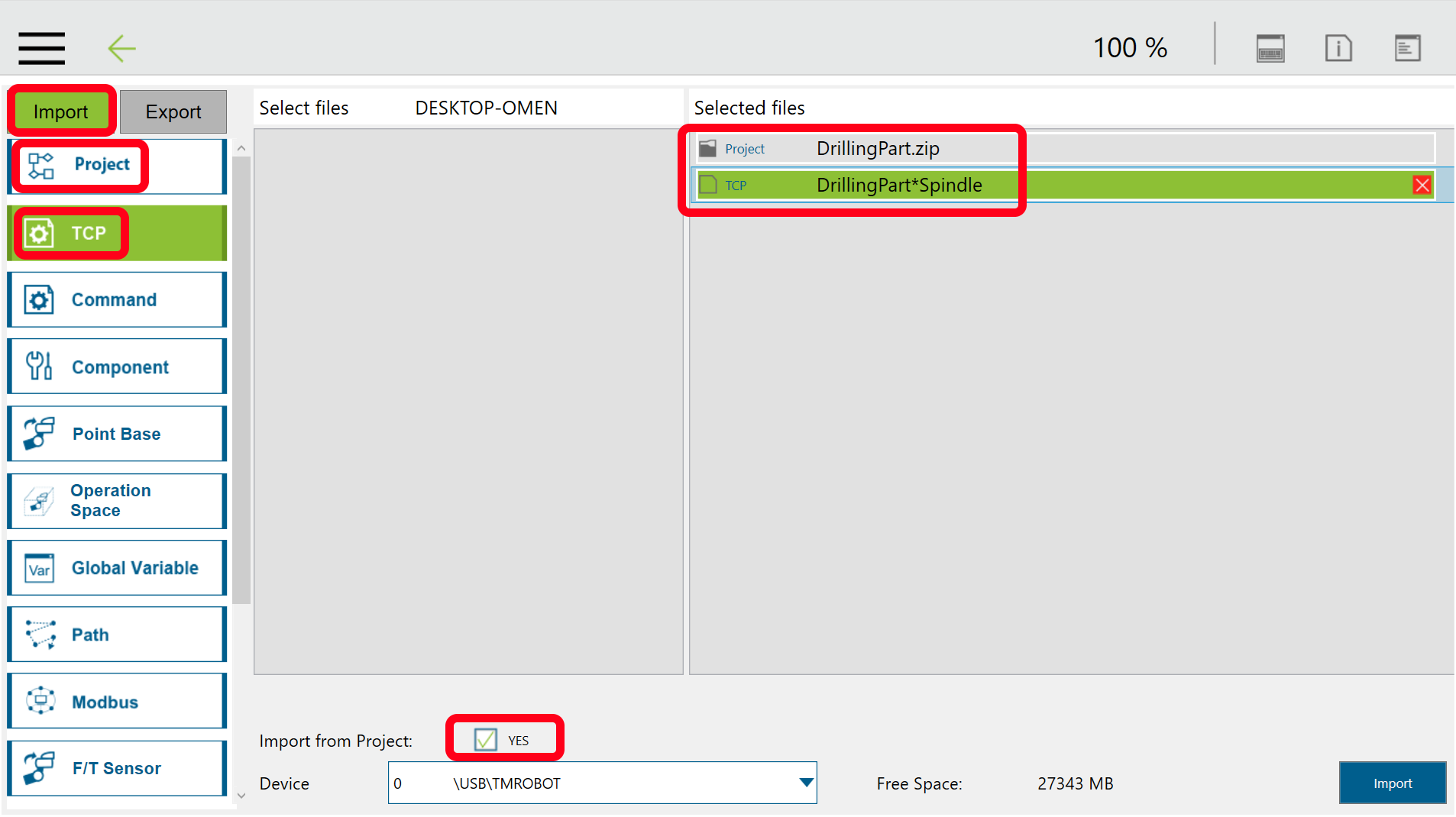
2.Select the main menu➔System➔Import/Export
3.Select Import and select your folder in TM_Export
4.Select Project and select your ZIP program(s)
5.Select TCP
6.Check the option Import from Project ➔ Yes
7.Select your program and select the tools in your program to make sure you load them.
8.Select Import
Your program will now be available when you select to open new programs.