Update Robot Kinematics
Following the steps in this section is optional and only required under certain circumstances when accuracy is required in offline programming. This section explains how to input the unique kinematic values of your UR robot in RoboDK to accurately simulate the robot.
UR controller kinematics are unique for each robot. The kinematics are the dimensions that define the robot in the form of the DH table (Denavit Hartenberg). RoboDK simulator uses the nominal UR kinematics by default, therefore, you may see from 2 mm to 10 mm discrepancy between the simulator kinematics and the controller kinematics.
To make the simulation exactly match the real robot you can import your UR robot-specific kinematics by simply opening a URP file created with the teach pendant.
You can also load the URP file manually by following this procedure:
1.Retrieve a URP file generated using the real robot (not using RoboDK or the UR simulator)
2.Open your robot in RoboDK. You'll find your UR robot in the RoboDK library. You can also use a UR robot available in one of your existing RoboDK stations.
3.Select Tools-Run Script
4.Select UR_LoadControllerKinematics
5.Select the URP file extracted from the robot controller.
You should see a message as shown in the following image. You may see warning message if you did not load a valid URP file or you did not select the right UR robot.
When this procedure is completed, you can right click a robot and select Save as .robot. These parameters are saved with the robot file and you can use the robot file instead of repeating this procedure for every new project.
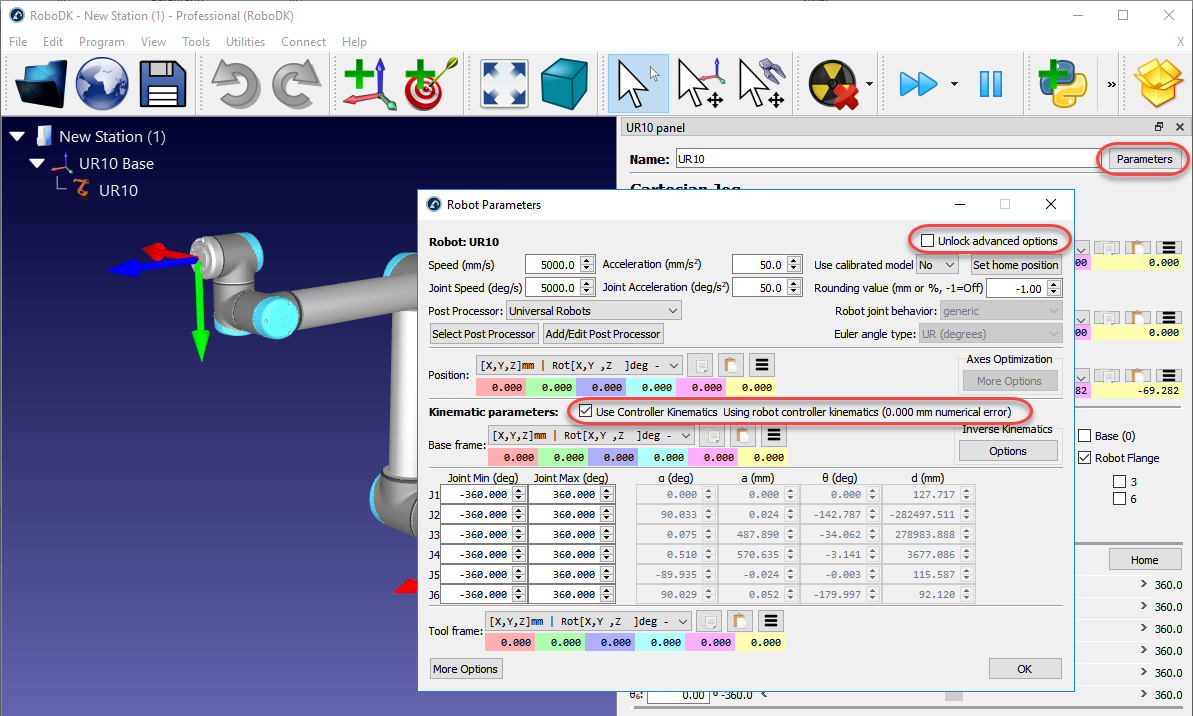
RoboDK extracts the information specific to your robot from the URP file and takes it into account for simulation and offline programming in the robot file. You can change this setting and revert to the default kinematics in the robot parameters menu as shown in the following image.
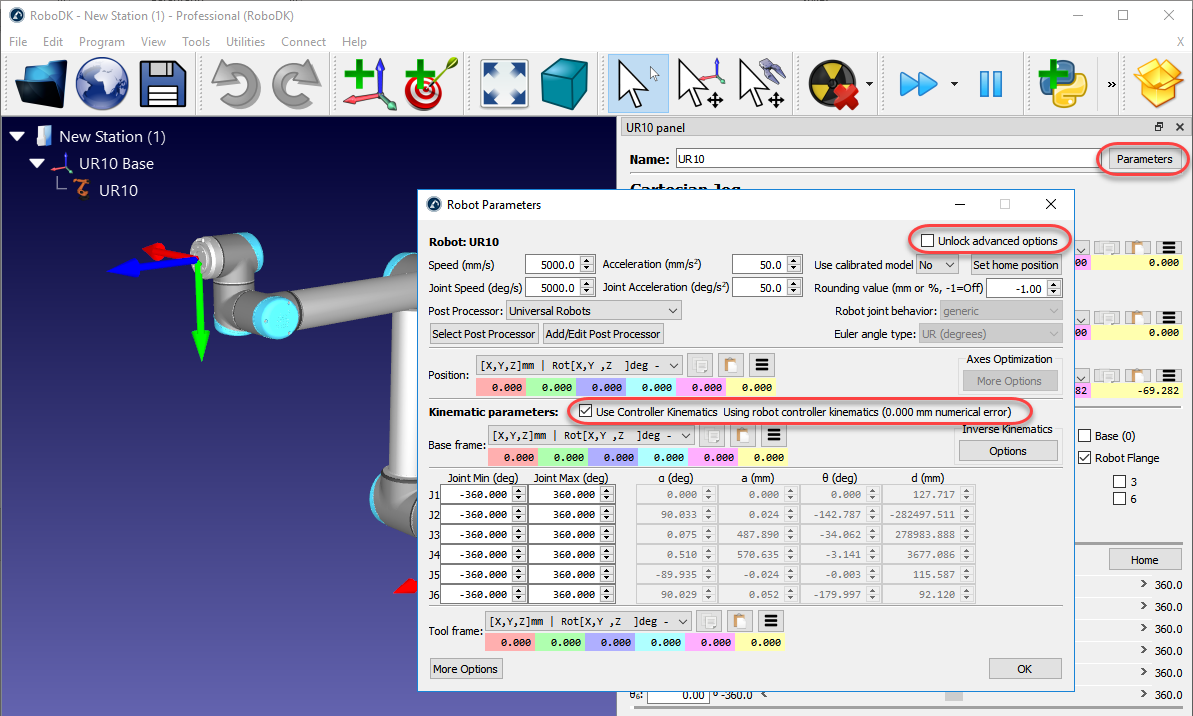
You’ll notice that the Pose information displayed in the teach pendant matches the kinematics displayed in RoboDK (make sure you remove the tool frame and reference frame on RoboDK and the UR robot to make the comparison).
UR kinematics change from one robot to another one because each robot is calibrated in the factory by UR. Other robot vendors such as KUKA, ABB, Motoman or Fanuc do not calibrate their robots unless you purchase the so-called Absolute Accuracy option. The Absolute Accuracy options may take into account up to 40 calibration parameters or more.
This procedure is not the same as RoboDK’s robot calibration. Robot calibration helps improving the accuracy of the real robot.