Using the RobotiQ gripper
RoboDK supports generating programs for Universal Robots that can operate RobotiQ grippers. You can operate the RobotiQ gripper by generating a program offline and by using the RoboDK driver for UR robots.
Using the RobotiQ gripper from RoboDK
You can operate the RobotiQ gripper directly from the UR controller by generating programs offline using RoboDK.
To add support for RobotiQ grippers you should select the Universal_Robots_RobotiQ post processor:
1.Right click a program or your robot
2.Select Select Post Processor
3.Select Universal Robots RobotiQ
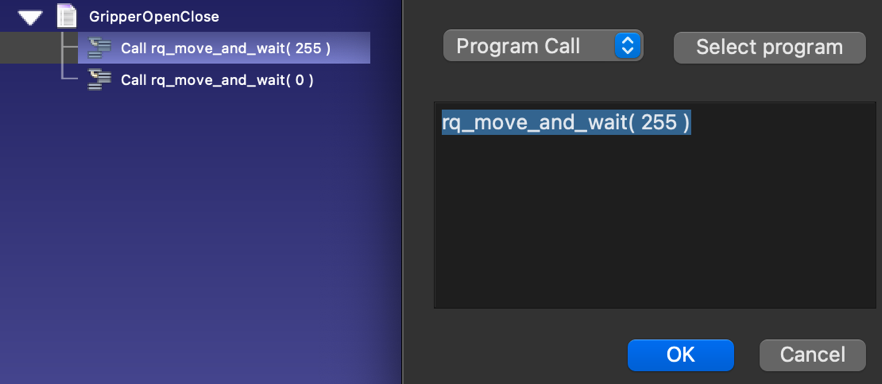
You can then generate program calls that can operate the RobotiQ gripper. For example: rq_move_and_wait( 255 ) to open the gripper or rq_move_and_wait( 0 ) to close the gripper.
Once you have the program ready in RoboDK, you can run it on the robot using one of these 2 methods:
- Right click a program (such as the GripperOpenClose) and select Send Program to Robot
- Right click a program (such as the GripperOpenClose) and select Generate Program (this second option requires you to manually load the program on the robot).
This method of operation does not require using the driver.
Using the RobotiQ gripper with the driver
You can operate the RobotiQ gripper directly from RoboDK using the driver (Run on robot option). The RoboDK driver for UR and RobotiQ allows you to run programs step by step from RoboDK and see the pointer being run anytime from RoboDK.
It is important to make sure you can connect to the robot to use this feature. You may need administrator privileges on Windows and/or add a Windows Firewall rule to allow this communication (if you disable the Windows Firewall it may help troubleshoot if the issue is related to the Firewall).
You should follow these steps to add support to moving the RobotiQ gripper directly from RoboDK:
1.Download the following script file:
https://robodk.com/files/upload/progrobodk-rq.zip
https://robodk.com/files/upload/progrobodk-rq-no-tool-com.zip.
2.Unzip the progrobodk.script file here:
C:/RoboDK/bin/progrobodk.script
3.Make sure to restart the driver if it was running (double click Disconnect, then, Connect).
4.Select Tools-Options-Drivers
5.Uncheck the option: Manage program calls with RoboDK when connected to a robot.
To properly operate the gripper using the driver (for example, opening/closing the gripper), you should use the program call to rq_move_and_wait by passing a parameter within the range 0-255.
Example:
rq_move_and_wait( 0 ) # Fully close the gripper
rq_move_and_wait( 255 ) # Fully open the gripper
The number passed as an argument is required by the driver.