Setup for Smart Motion
You should make sure your RoboDK project is properly configured to effectively use the Smart Motion planner.
Your project should include the following:
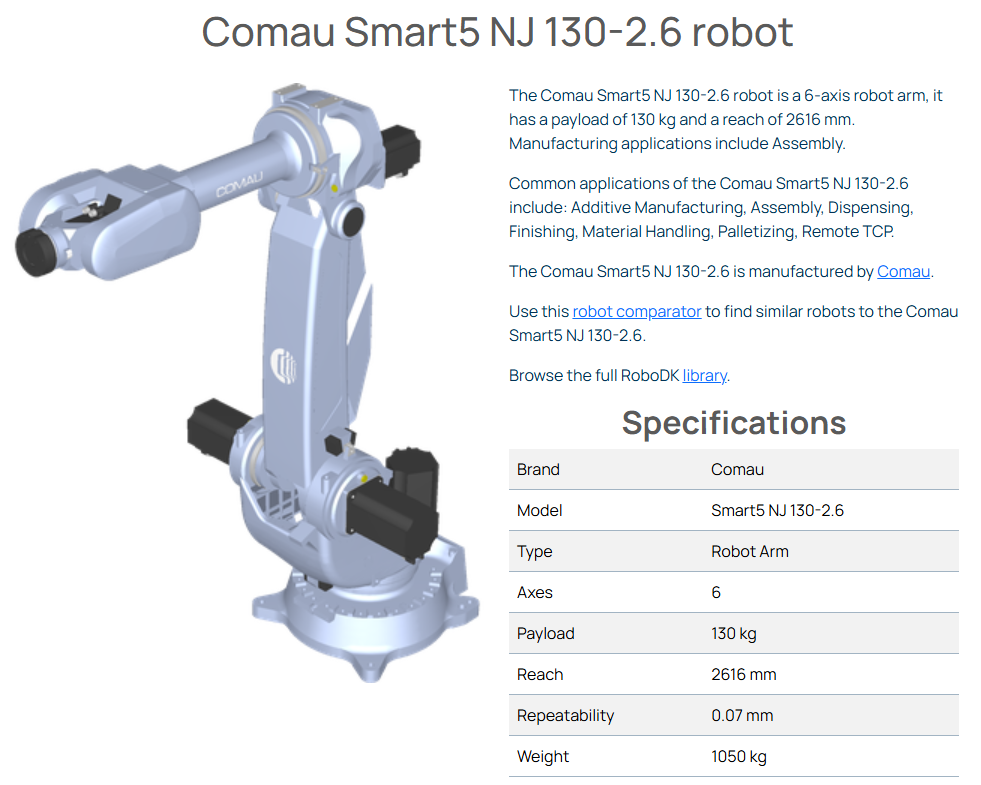
1.Robot: One robot arm. For our example, we are using the Comau Smart5 NJ 130-2.6 robot.
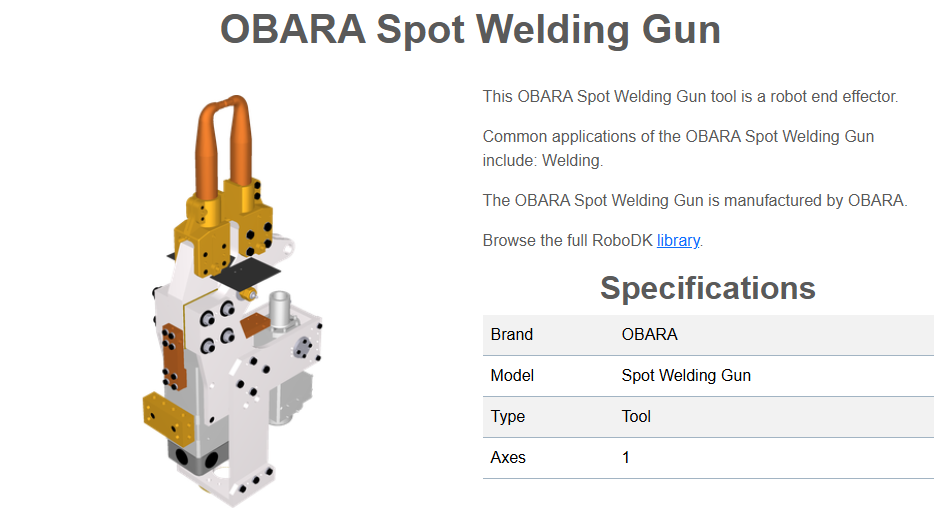
2.Tool: One or more tools (TCP). The spot-welding example will use the OBARA Spot Welding Gun.
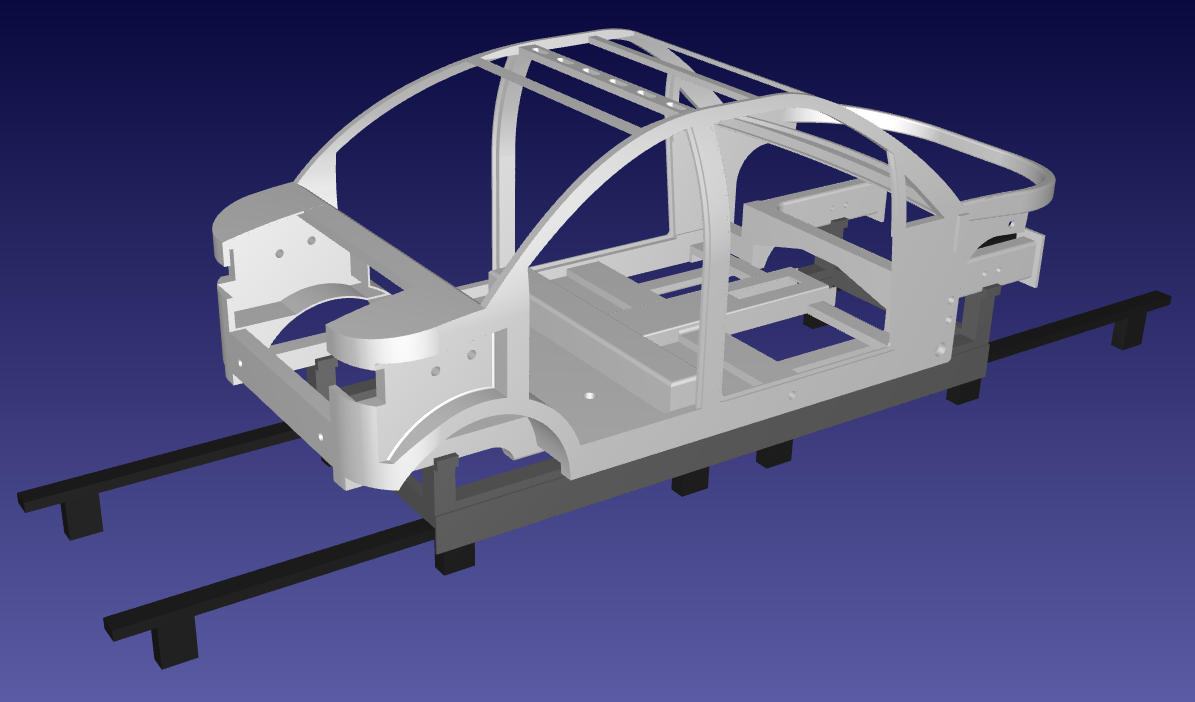
3.Objects: At least one object (obstacle) must be available in the workspace to make use of collision avoidance. In this case, we have used a custom Car Frame along with a Car Frame Rack and a Car Frame Rail.
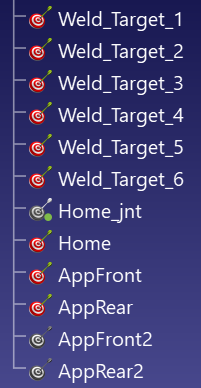
4.Targets: Start and end locations for the generated path should be defined using targets. So, at least two targets should be present in the station. The example contains approach/retract targets at the front and the rear, and also a few targets inside the Car Frame where spot-welding should take place.