Teach a coordinate system
With RoboDK TwinTrack you can probe and locate your coordinate systems (or reference frames) to locate objects in the robot workspace.
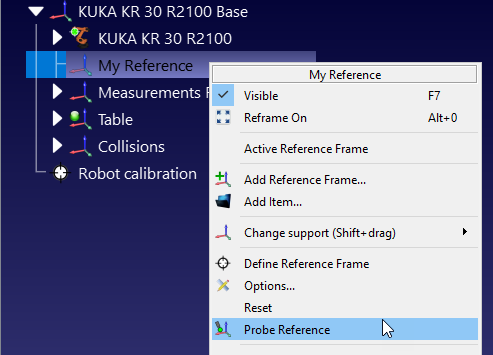
Right click your coordinate system and select Probe Reference.
Tip: Make sure to add a new reference frame attached to the base of your robot if you don’t have a custom reference frame (select Program➔Add Reference Frame).
You should then probe 3 points in the following order:
1.First point in the origin.
2.Second point along the positive X axis.
3.Third point along the positive Y axis.
By properly setting your coordinate system you can program robots remotely. For example, if you have a properly defined fixture, when you want to program a new part you can simply do it from your office or from home without even having to be near your robot.
Video: How to create a coordinate system using RoboDK TwinTrack: https://youtu.be/IP2UMXQk-nY?t=32.