Game Controller
Introducción al Addin del mando de videojuegos
El Addin Game Controller para RoboDK es una herramienta eficiente diseñada para permitirle controlar manualmente un robot mediante un mando de videojuegos estándar (como un mando de Xbox). Este Addin es ideal para enseñar rápidamente objetivos, comprobar la accesibilidad del robot o demostrar los movimientos del robot en un entorno simulado o real.
Instalación
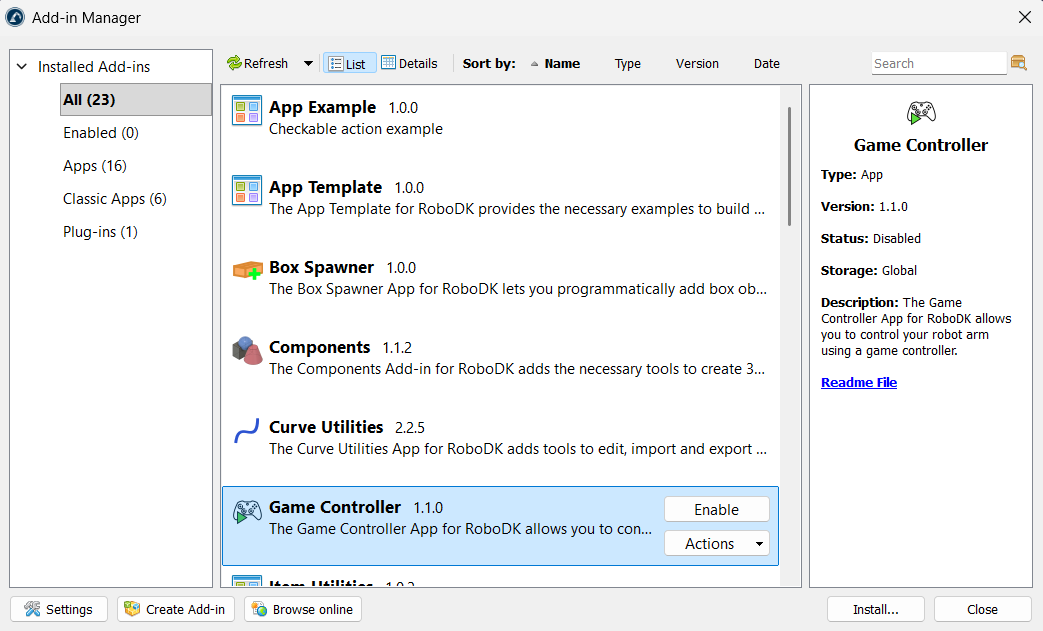
Puede instalar el complemento de controlador de juegos desde la biblioteca en línea de RoboDK. Otra forma de hacerlo desde el propio software RoboDK es yendo a Herramientas > Gestor de Addins y activando el complemento de controlador de juegos.
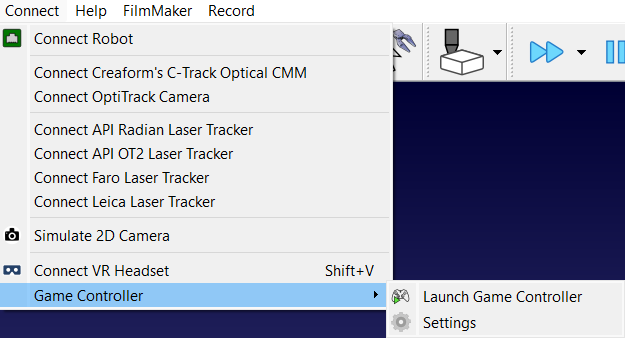
Tras la instalación, las opciones del controlador de juegos se encuentran en el menú «Conectar». También puede encontrar el icono «Iniciar controlador de juegos» en la barra de herramientas.
Uso del controlador
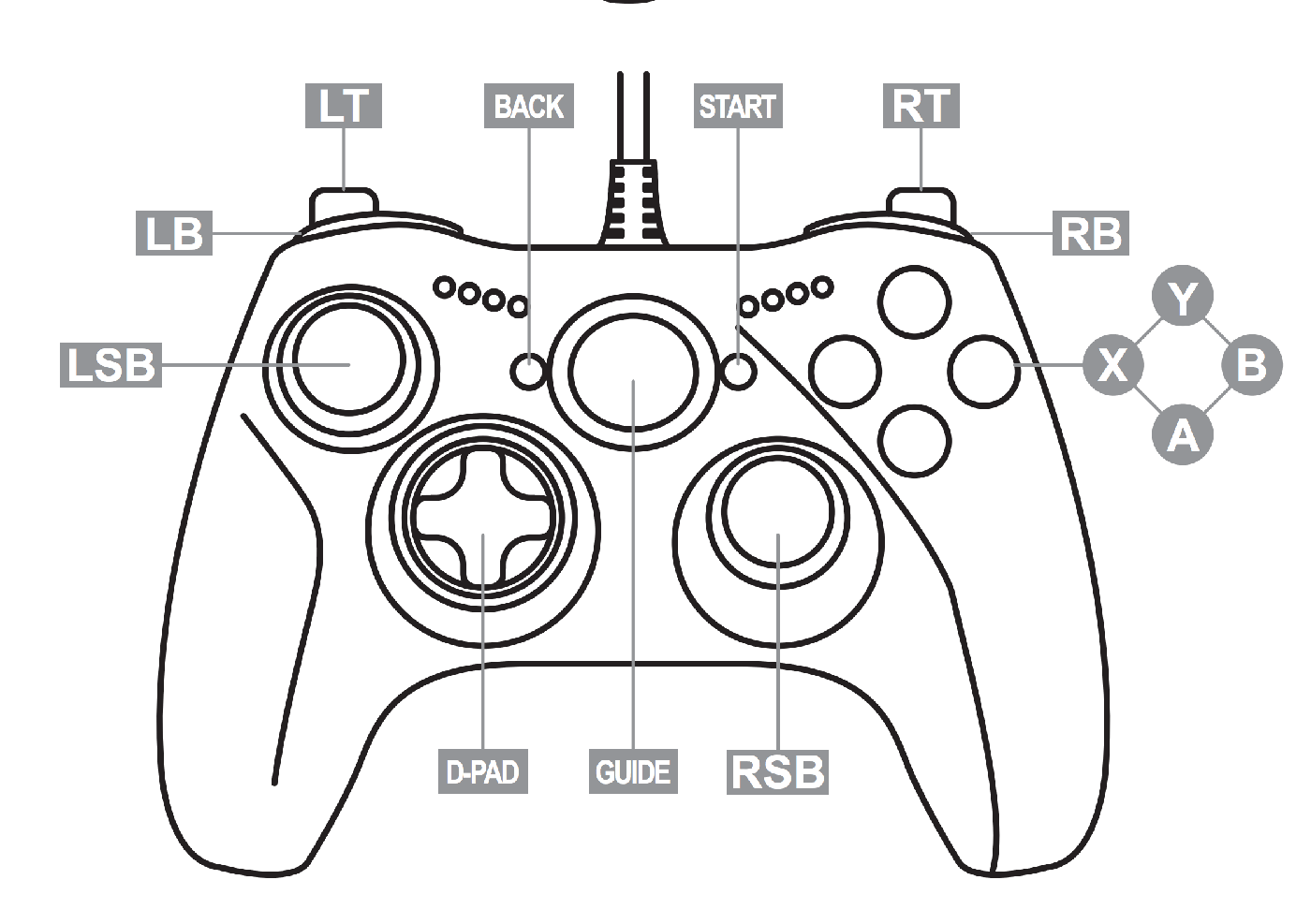
En primer lugar, debe conectar su mando al dispositivo en el que está utilizando RoboDK. El Addin asigna movimientos y ajustes específicos del robot a las entradas estándar del mando. La asignación predeterminada se creó para un mando de Xbox One.
Controles de movimiento
Pulse el icono «Iniciar mando de juego» en la barra de herramientas o vaya a Conectar > Mando de juego > Iniciar mando de juego. Esto iniciará el Addin y este intentará detectar automáticamente el mando conectado. Vuelva a hacer clic en el icono «Iniciar mando de juego» para detener el Addin.
Para mover el robot, debe seleccionar un eje y utilizar el pad direccional para aplicar el movimiento.
1.Seleccionar el eje X: mantenga pulsado el botón X del mando.
2.Seleccionar el eje Y: mantenga pulsado el botón Y del mando.
3.Seleccionar el eje Z: mantenga pulsado el botón B del mando.
4.Movimiento: Mientras mantiene pulsado un botón de eje, utilice el pad direccional hacia arriba o hacia abajo para mover el robot a lo largo del eje seleccionado.
Conmutadores
El Addin Game Controller ofrece algunos botones de alternancia para personalizar el comportamiento.
Otras opciones para manipular el movimiento de su robot incluyen:
1.Traslación frente a rotación: pulse el botón del joystick izquierdo (LSB) para alternar entre mover el robot de forma lineal (mm) o girarlo (grados). Por defecto, utilizamos la traslación (mm).
2.MoveJ frente a MoveL: Pulse el botón del joystick derecho (RSB) para alternar entre el movimiento de las articulaciones (MoveJ) y el movimiento lineal (MoveL). La instrucción de movimiento predeterminada es MoveJ.
3.Tamaño del paso: utilice el pad direccional hacia la izquierda o hacia la derecha para disminuir o aumentar el incremento del paso de movimiento.
4.Posición de origen: Pulse ambos botones de los gatillos (LB + RB) simultáneamente mientras activa la protección para que el robot vuelva a su posición de origen.
Funciones de seguridad
El Addin incluye un mecanismo de protección obligatorio para evitar movimientos accidentales.
Los movimientos accidentales incluyen lo siguiente:
1.Activación del dispositivo de seguridad: Debe mantener pulsado el gatillo derecho (RT) para permitir cualquier movimiento del robot. Si se suelta el gatillo, el robot no se moverá y la App mostrará el siguiente mensaje:
¡Por favor, pulse el gatillo de seguridad!
2.Advertencia de configuración: El Script comprueba si el nuevo movimiento provoca un cambio en la configuración del robot (por ejemplo, giro de muñeca). Si se detecta un cambio, el movimiento se bloquea y se muestra la siguiente advertencia para evitar un comportamiento inesperado:
Se ha cambiado la configuración del robot. ¡Esto puede provocar movimientos inesperados! Mueva el robot a través de RoboDK o pruebe con otro comando.
3.Comprobación de accesibilidad: El sistema valida el movimiento utilizando cinemática inversa (IK). Si el objetivo está fuera de alcance o cerca de una singularidad, aparecerán los siguientes mensajes:
Objetivo inalcanzable. Intente utilizar MoveJ u otro comando.
¡No hay solución para el robot! La nueva posición está demasiado lejos, fuera de alcance o cerca de una singularidad.
Manejo de dispositivos y robots
El addin incluye lógica para gestionar múltiples dispositivos o robots dentro de la estación:
1.Múltiples controladores: Si hay más de un controlador conectado al PC, el Addin mostrará un mensaje indicando que se han encontrado varios controladores y utilizará por defecto el primero detectado.
2.Múltiples robots: si la estación contiene más de un robot, el Addin solicitará al usuario que «Seleccione un robot» de una lista. Si solo hay un robot presente, se seleccionará automáticamente sin preguntar al usuario.
Simulación frente a robot real
El Addin se puede utilizar tanto para la simulación fuera de línea como para el control en tiempo real del robot:
1.Modo de simulación: el modo predeterminado para probar movimientos de forma segura dentro de la estación RoboDK.
2.Modo de robot real: para controlar un robot físico, conéctelo a través de Connect-Connect Robot. El Addin le preguntará si desea ejecutar el programa en el robot real en lugar de permanecer en el modo de simulación. Al hacer clic en «Sí», se le pedirá que introduzca la dirección IP del robot, tras lo cual podrá hacer clic en «Conectar».
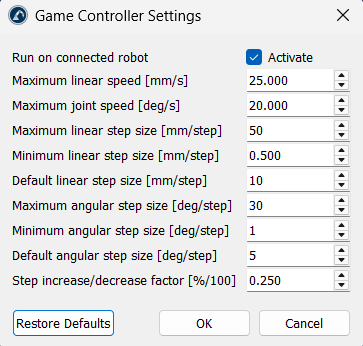
Configuración
Puede encontrar ajustes adicionales para la personalización en Connect-Game Controller-Settings.