Funciones de IsaacSim Bridge
Esta sección muestra las funciones básicas del Addin IsaacSim Bridge en IsaacSim.
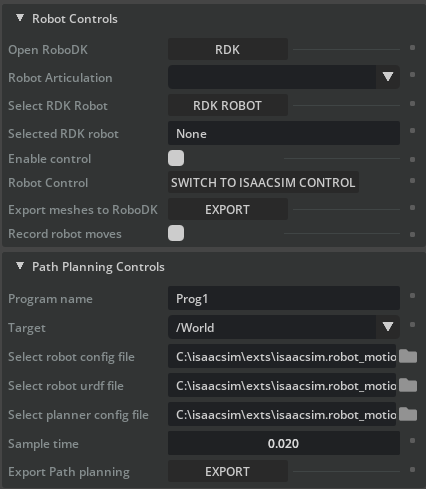
La ventana de la extensión IsaacSim Bridge contiene los siguientes elementos funcionales:
1.Controles del robot
a.Abrir RoboDK: abre RoboDK si no está abierto o se conecta a la instancia de RoboDK que se está ejecutando actualmente si lo está. Esto es necesario para que la extensión funcione.
b.Articulación del robot: seleccione la articulación que se va a utilizar dentro de IsaacSim.
c.Seleccionar robot RDK: seleccione el robot que se va a utilizar dentro de la estación RoboDK.
d.Robot RDK seleccionado: Imprime el nombre del robot seleccionado.
e.Habilitar control: habilita la comunicación del robot entre la escena de IsaacSim y la estación RoboDK.
f.Control del robot: seleccione el robot de referencia que se debe utilizar como robot a emparejar. Si la opción muestra Cambiar al control de IsaacSim, RoboDK actúa como maestro y la articulación del robot dentro de IsaacSim seguirá la pose del robot RoboDK seleccionado.
g.Exportar mallas a RoboDK: convierta los objetos de malla de la escena de IsaacSim en archivos de malla 3D y cárguelos en la estación RoboDK. El origen del objeto convertido estará en la base de la estación, pero se desplazará para que la ubicación actual coincida con su ubicación en la escena de IsaacSim. Cada uno de los objetos de malla de IsaacSim será un objeto independiente en la estación RoboDK y se podrá mover.
h.Grabar los movimientos del robot: graba todos los movimientos realizados por el robot IsaacSim y los añade a un programa dentro de RoboDK. Esto es útil si tiene un programa dentro de IsaacSim que desea exportar a RoboDK.
2.Controles de planificación de trayectorias
a.Nombre del programa: nombre del programa que se utilizará al exportar a RDK.
b.Objetivo: menú desplegable de XForms que se utilizará como objetivo para el planificador de trayectorias RRT.
c.Seleccionar archivo de configuración del robot: seleccione el archivo de configuración del robot que se utilizará para la planificación de la trayectoria. El formato del archivo debe ser yaml.
d.Seleccionar archivo urdf del robot: seleccione el archivo de definición del robot que se utilizará para la planificación de la trayectoria. El formato del archivo debe ser urdf.
e.Seleccionar archivo de configuración del planificador: seleccione el archivo de configuración del planificador que se utilizará para la planificación de la trayectoria. El formato del archivo debe ser yaml.
f.Tiempo de muestreo: seleccione el tiempo de muestreo que se utilizará al generar la trayectoria. Un tiempo de muestreo más corto dará lugar a más instrucciones MoveJ en el programa con pasos más pequeños entre ellas.
g.Exportar planificación de trayectoria: utiliza RRT para calcular una trayectoria entre la posición actual del robot y el objetivo seleccionado y crear un programa de robot con una lista de instrucciones que completan la trayectoria.