Plato giratorio (3x)
Puede crear un posicionador de 3 ejes especificando parámetros como el radio de la brida, los desplazamientos laterales y horizontales, la altura y los colores de la base, la viga y las bridas.
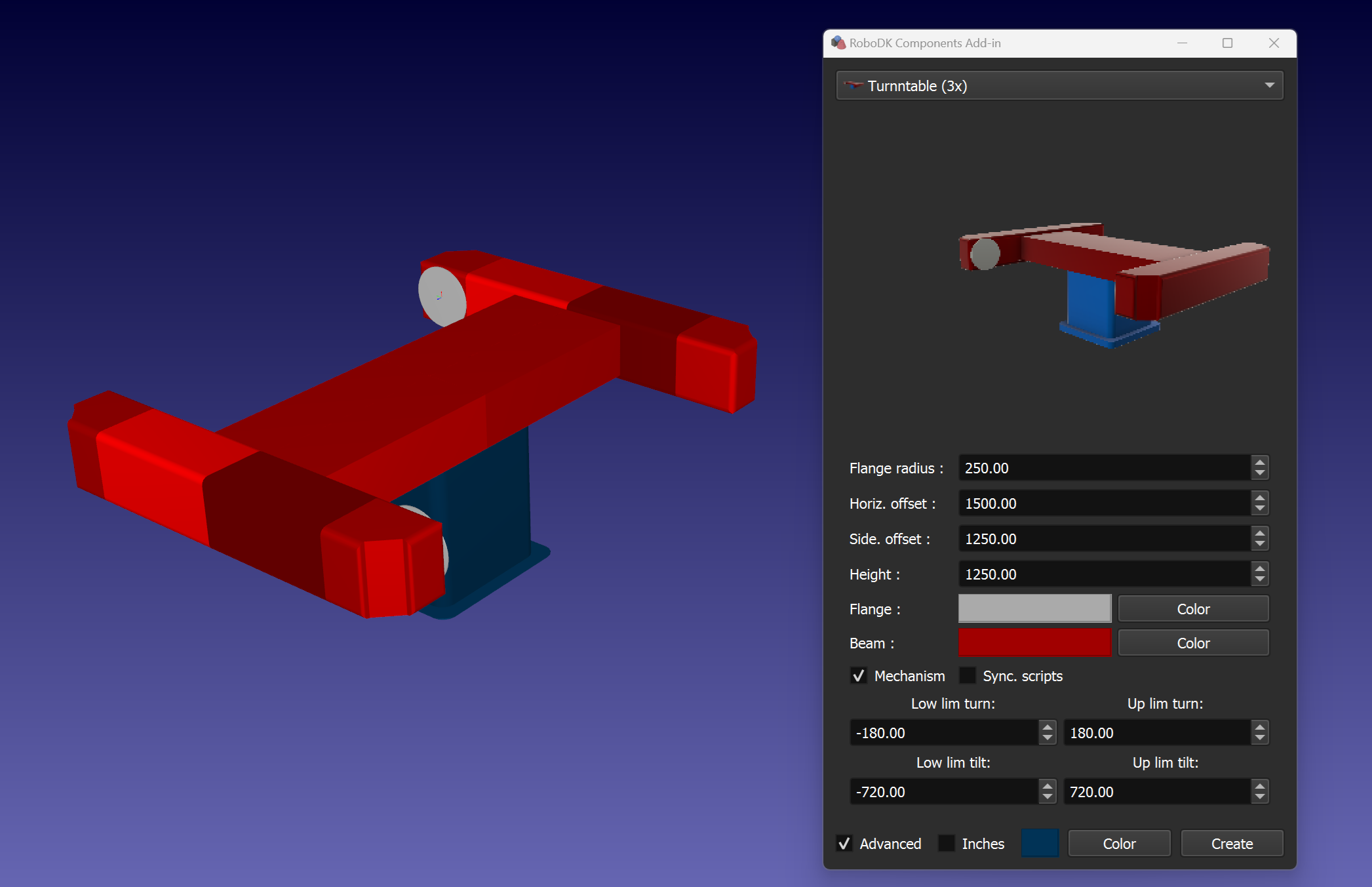
Consejo: Utilice la casilla Mecanismo para crear un mecanismo posicionador de 3 ejes. Puede fijar adicionalmente los límites de movimiento con los parámetros correspondientes.
Consejo: Utilice la casilla de verificación Scripts de sincronización para crear scripts Python adicionales que sincronizarán el robot con el eje horizontal requerido mediante la ejecución del script correspondiente.
Nota: Por defecto, C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ es la carpeta que contiene los ejemplos de scripts de sincronización.