T-bot
Puede crear un robot T paramétrico estableciendo parámetros para el haz X, el carro y el haz Z.
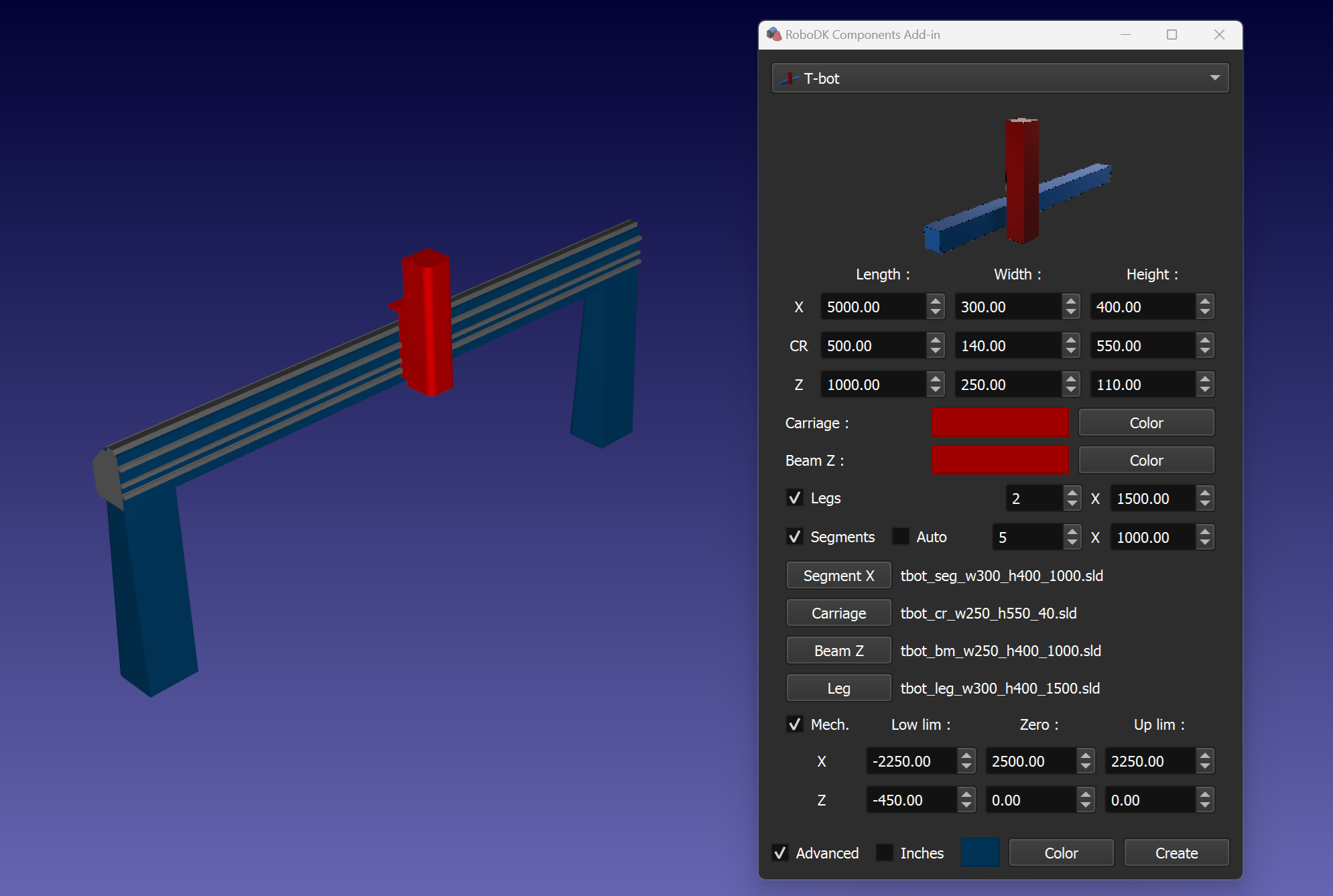
Consejo: Puede crear un robot en T con un haz X segmentado utilizando los modelos Segmento, Haz Z y Carro. Es necesario configurar los archivos de modelo adecuados utilizando los botones Segmento X, Carro y Viga Z. Asegúrese de utilizar los valores de dimensión correctos y el número correcto de segmentos. Utilice la casilla Segmentos para construir el modelo de robot en T adecuado.
Consejo: Utilice la casilla Mecanismo para crear un mecanismo T-bot. Además, puede fijar los límites de movimiento y la posición cero de los ejes con los parámetros correspondientes.
NotaCompruebe el desplazamiento de los modelos de segmentos, viga y carro en caso de utilizar la opción Segmentos. Hay varios ejemplos en la carpeta Modelos. Por defecto, la carpeta con ejemplos de modelos es C:\RoboDK\Addins\com.robodk.app.shape\Components\models\tbot.
Consejo: Utilice la casilla Auto para establecer los parámetros basándose en las mediciones del cuadro delimitador del modelo. Los pequeños detalles del modelo pueden afectar al resultado de la medición. Puede desmarcar Auto después de la medición y establecer los parámetros manualmente.
Consejo: Utilice la casilla de verificación Patas para añadir el número necesario de columnas base de la altura especificada.