El Addin de componentes para RoboDK añade las herramientas necesarias para crear componentes visuales (objetos 3D y mecanismos) en el software RoboDK.
El Addin de componentes de RoboDK también le permite definir dimensiones y parámetros de configuración para los componentes que cree. Dispone de una vista previa para comprobar que el resultado es correcto
Puede establecer cualquier color y transparencia para los Componentes que piensa crear.
Esta sección muestra las funciones básicas del Addin Componentes.
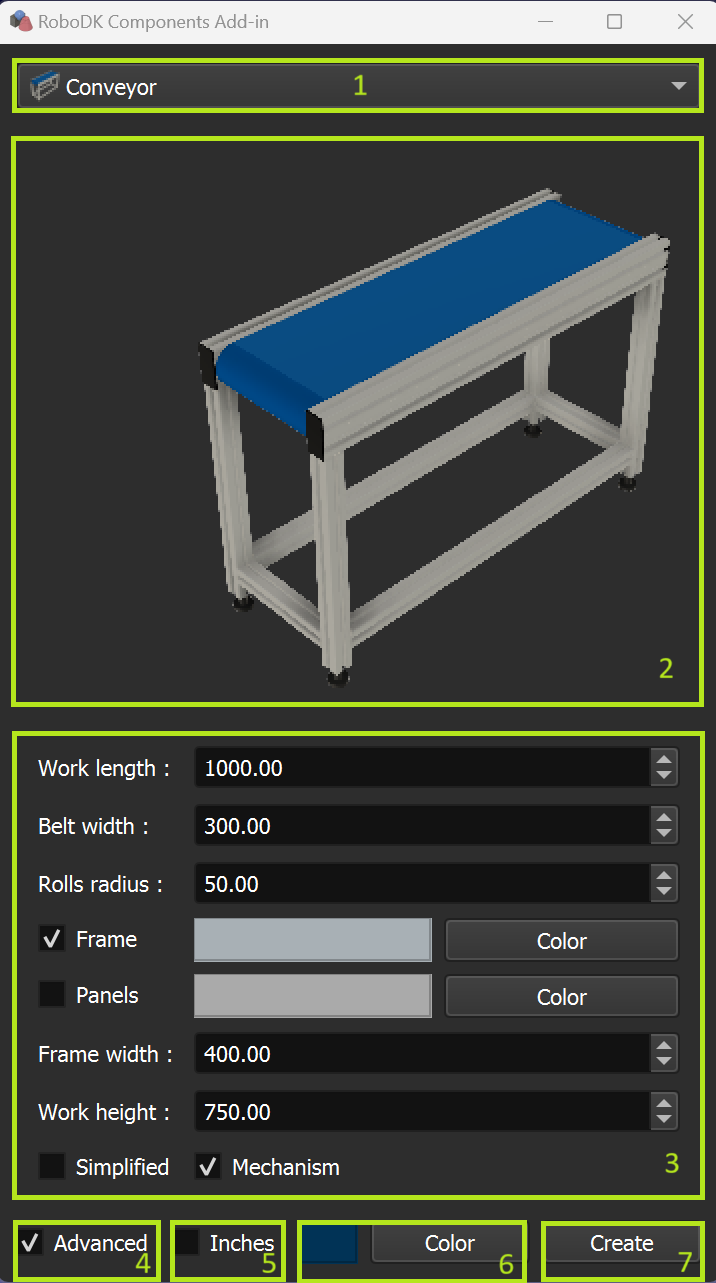
La ventana Componentes Addin contiene los siguientes elementos funcionales:
1.Zona de lista para la selección de componentes
2.Esquema del componente
3.Área de parámetros del componente seleccionado
4.Casilla de visibilidad de las opciones avanzadas
5.Casilla de verificación para utilizar pulgadas (por defecto se utilizan milímetros)
6.Selección de color y transparencia
7.Creación de componentes
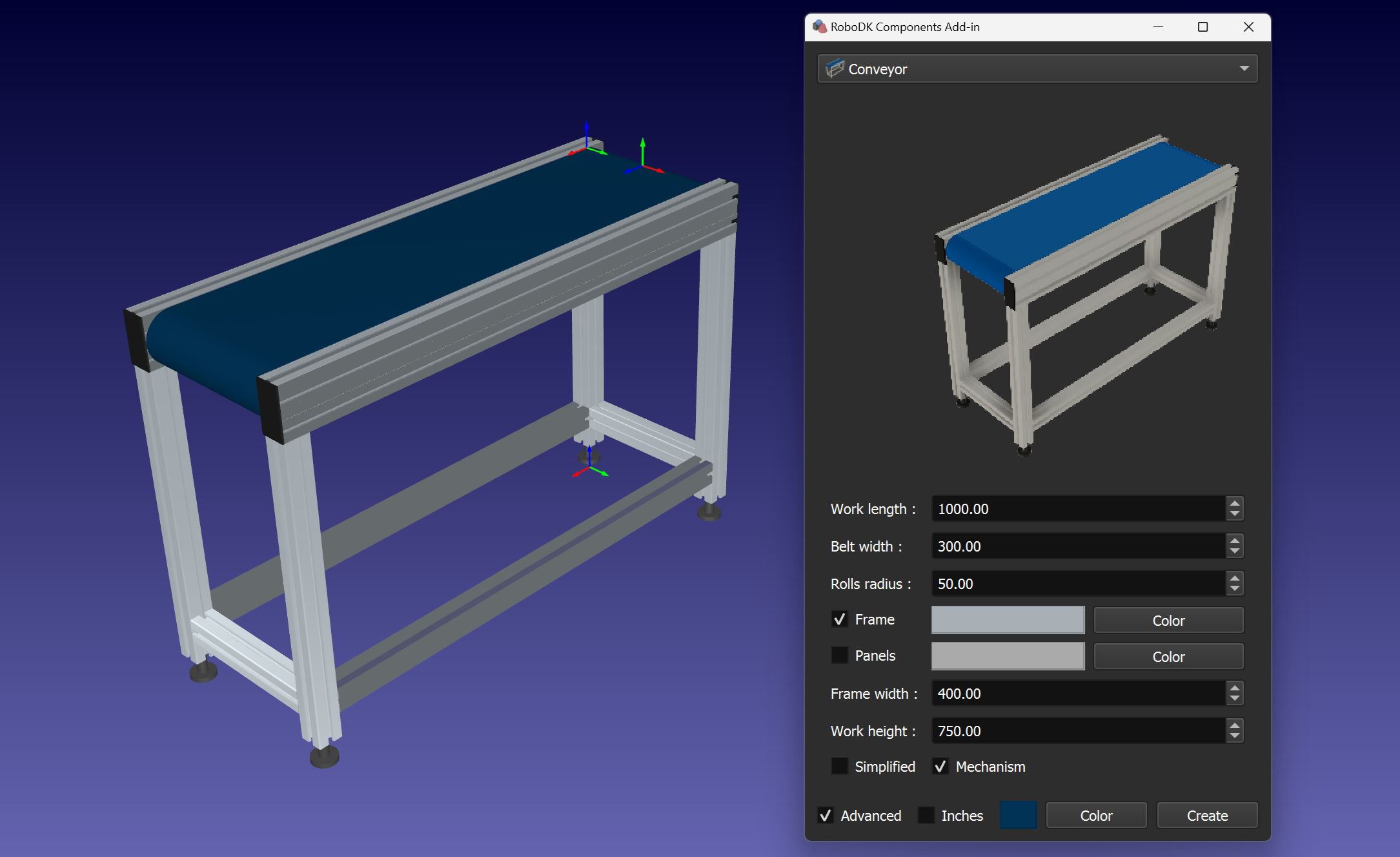
Transportador
Puede crear un transportador especificando las dimensiones del mismo.
Consejo: Utilice la casilla Marco con los valores de tamaño adecuados y el cuadro de diálogo Color para añadir un marco de transportador.
Consejo: Utilice la casilla Paneles y el cuadro de diálogo Color correspondiente para añadir los paneles del marco con el color y la transparencia especificados.
Consejo: Utilice la casilla Simplificado para alternar entre el marco simplificado y el realista.
Consejo: Utilice la casilla Mecanismo para crear un mecanismo de transporte.
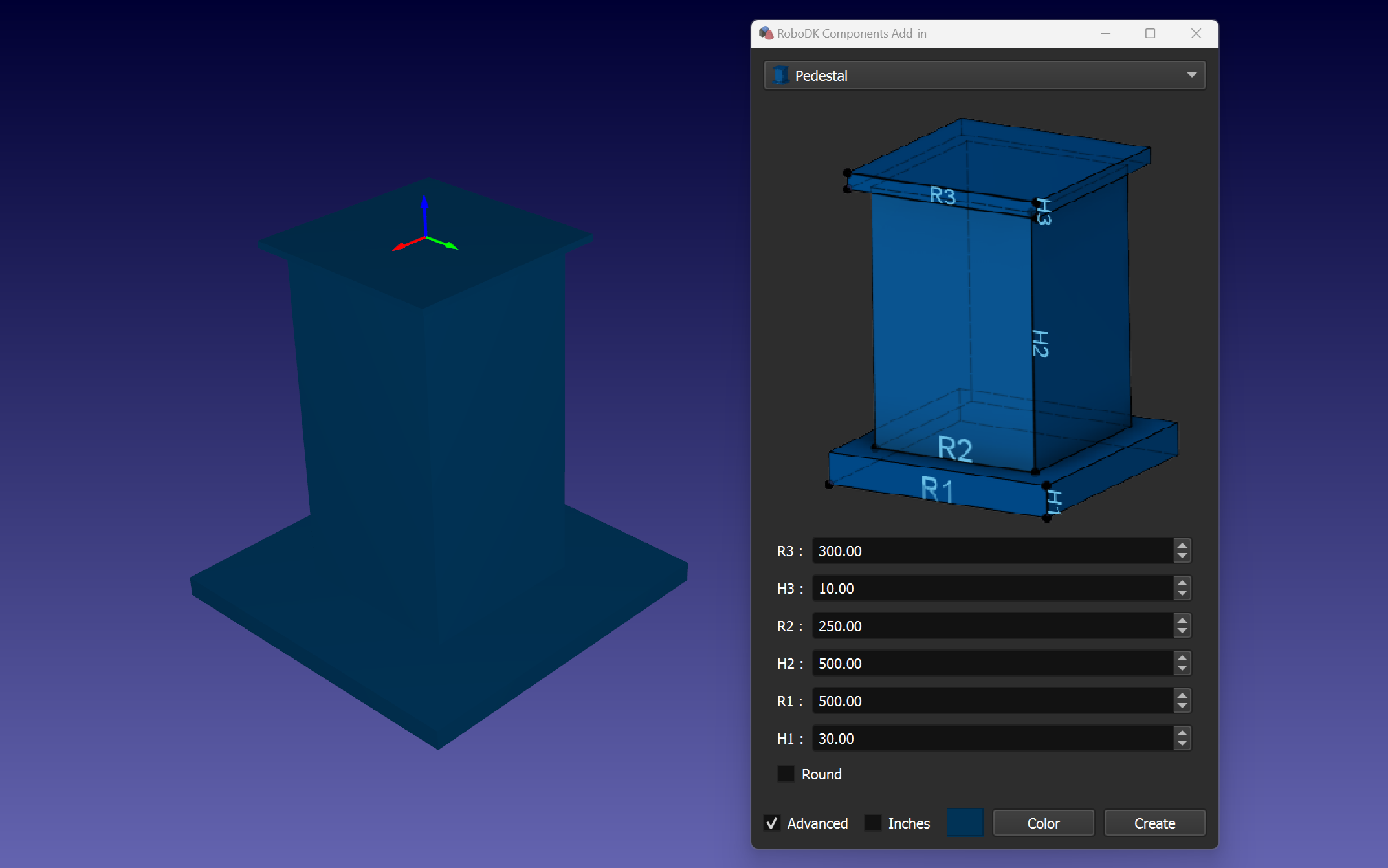
Pedestal
Puede crear un pedestal especificando las dimensiones (R1, R2, R3, H1, H2, H3).
Consejo: Utilice la casilla Redondo para crear un sótano cilíndrico.
Consejo: Un marco creado adicionalmente llamado Marco de Pedestal N Plano puede ser útil para colocar los objetos necesarios en el centro del plano superior del sótano.
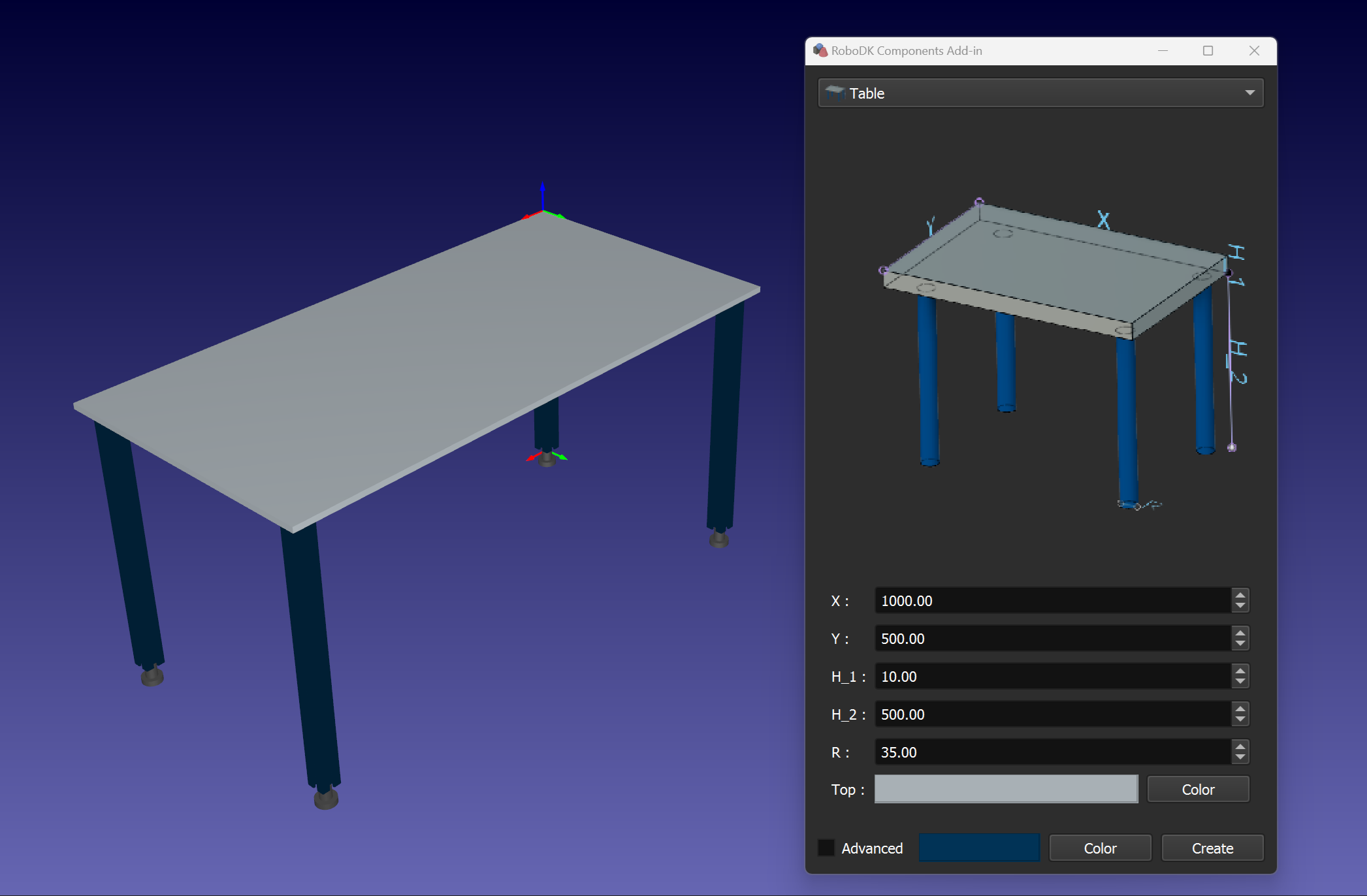
Tabla
Puede crear una tabla especificando las dimensiones (X, Y, R, H1, H2).
Consejo: Utilice el cuadro de diálogo Color para establecer el color y la transparencia de la superficie superior de la mesa.
Consejo: Un marco creado adicionalmente llamado Marco plano de la mesa N puede ser útil para colocar los objetos necesarios en la superficie superior de la mesa.
Consejo: Utilice la casilla Simplificado para alternar entre patas de mesa simplificadas y realistas.
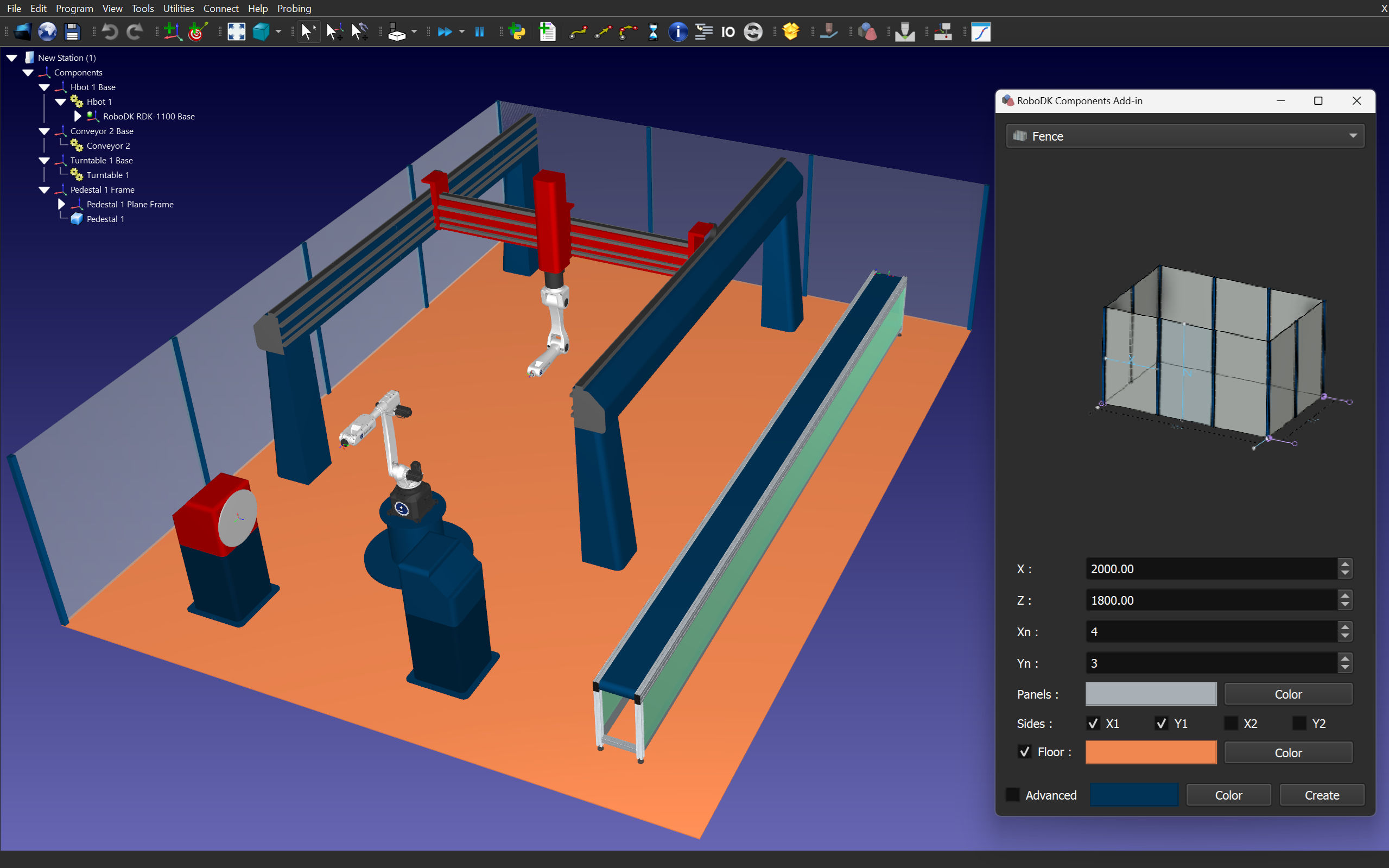
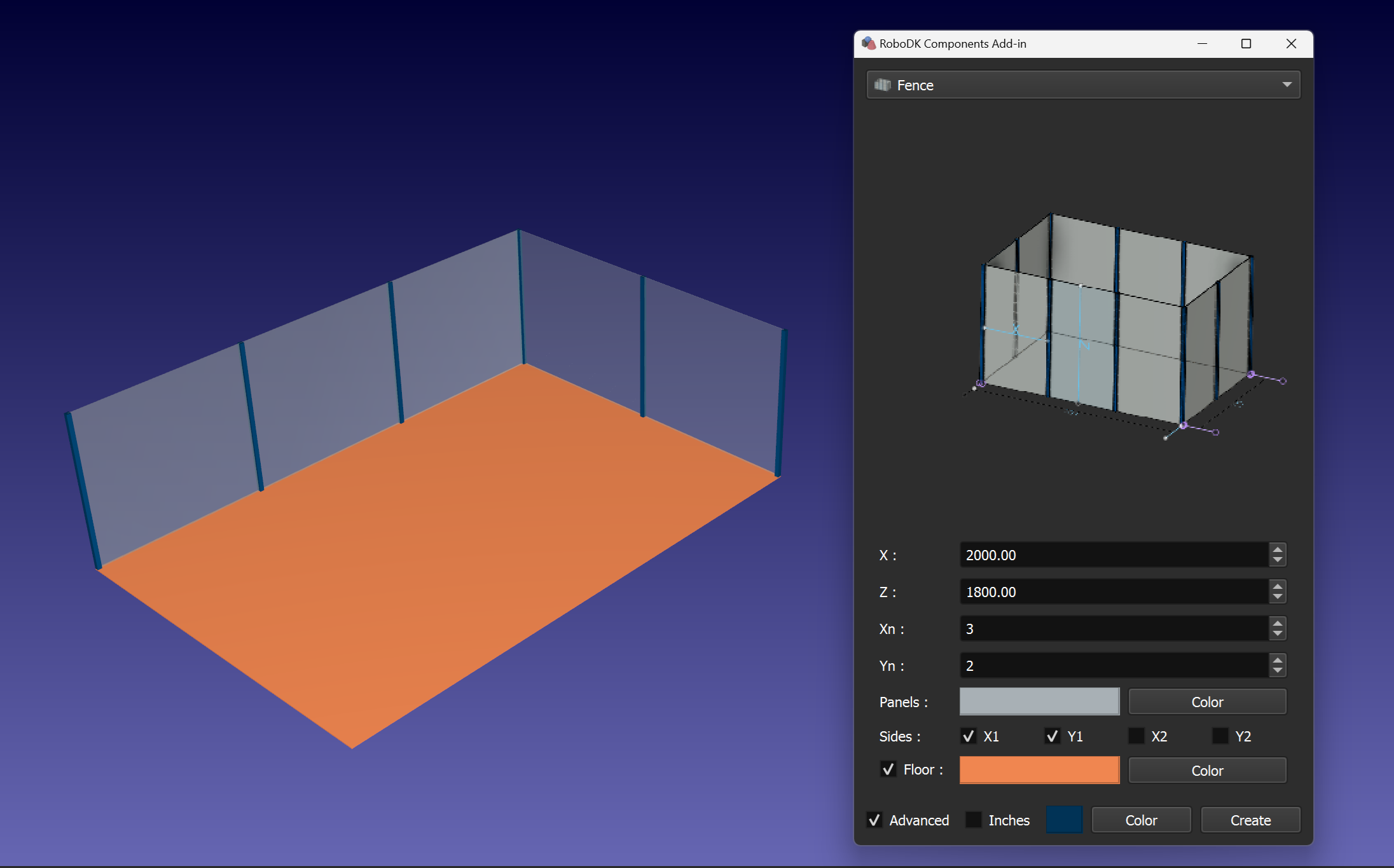
Valla
Puede crear una valla especificando las dimensiones de los paneles (X, Z) y el número de secciones (Xn, Yn).
Consejo: Utilice el cuadro de diálogo Color para establecer el color y la transparencia de los paneles de la valla.
Consejo: Utilice la casilla Suelo y el cuadro de diálogo Color correspondiente para añadir el suelo con el color y la transparencia especificados.
Consejo: Puede cambiar la configuración de la valla accionando las casillas X1, X2, Y1 e Y2.
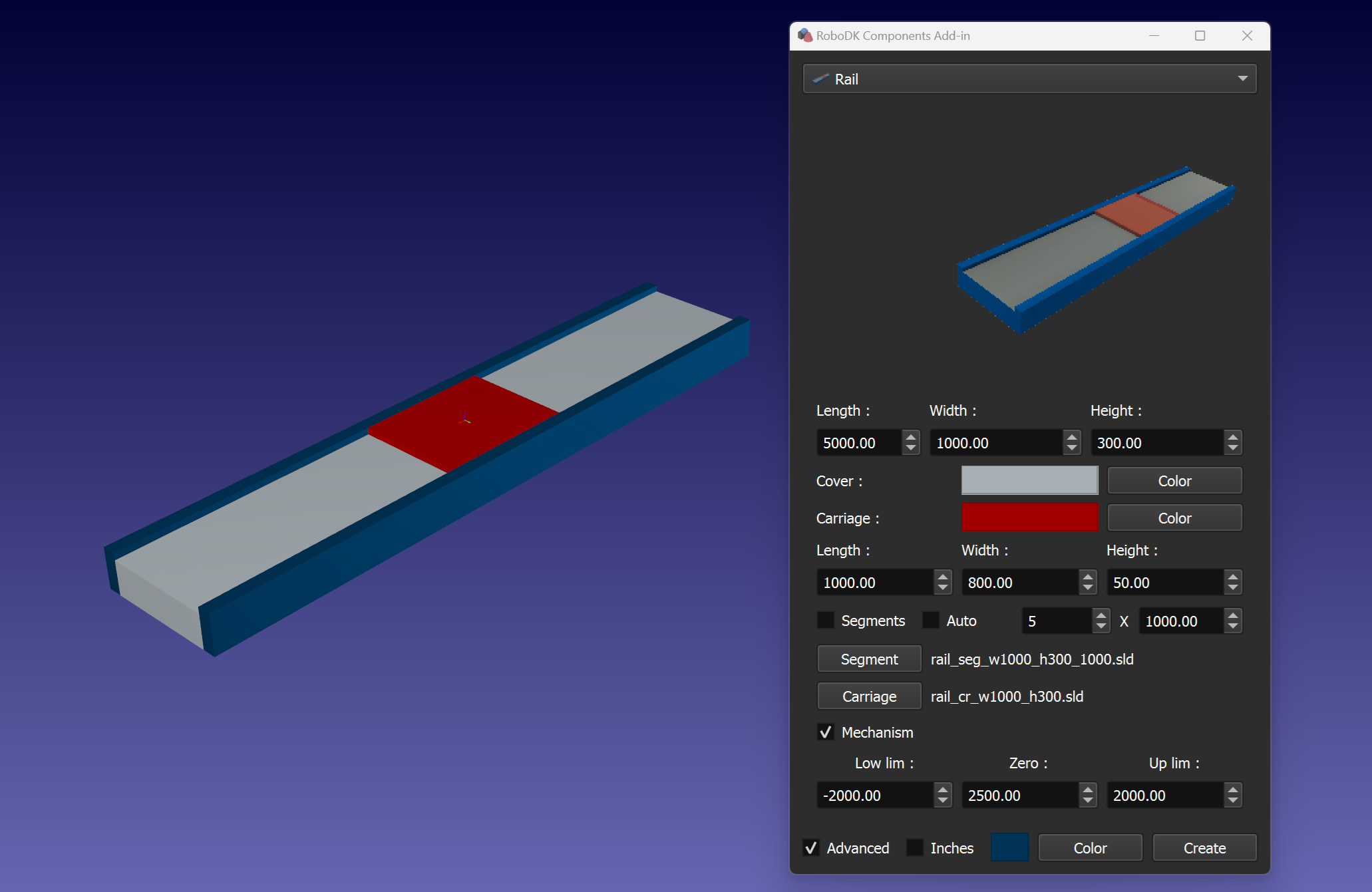
Carril
Puede crear un raíl especificando parámetros como la longitud, la anchura, la altura y el color para la base y el carro del raíl.
Consejo: Puede crear carriles segmentados utilizando los modelos de los segmentos base y del carro. Es necesario configurar los archivos de modelo correspondientes utilizando los botones Segmento y Carro. Asegúrese de utilizar los valores de dimensión correctos y el número adecuado de segmentos. Utilice la casilla Segmentos para construir el modelo de raíl correspondiente.
Consejo: Utilice la casilla Mecanismo para crear un mecanismo de raíles. Además, puede establecer los límites de movimiento y la posición cero del carro con los parámetros correspondientes.
NotaCompruebe el desplazamiento de los segmentos y los modelos de carro en caso de utilizar la opción Segmentos. Hay varios ejemplos en la carpeta Modelos. Por defecto, la carpeta con ejemplos de modelos es C:\RoboDK\Addins\com.robodk.app.shape\Components\models\rail.
Consejo: Utilice la casilla Auto para establecer los parámetros basándose en las mediciones del cuadro delimitador del modelo. Los pequeños detalles del modelo pueden afectar al resultado de la medición. Puede desmarcar Auto después de la medición y establecer los parámetros manualmente.
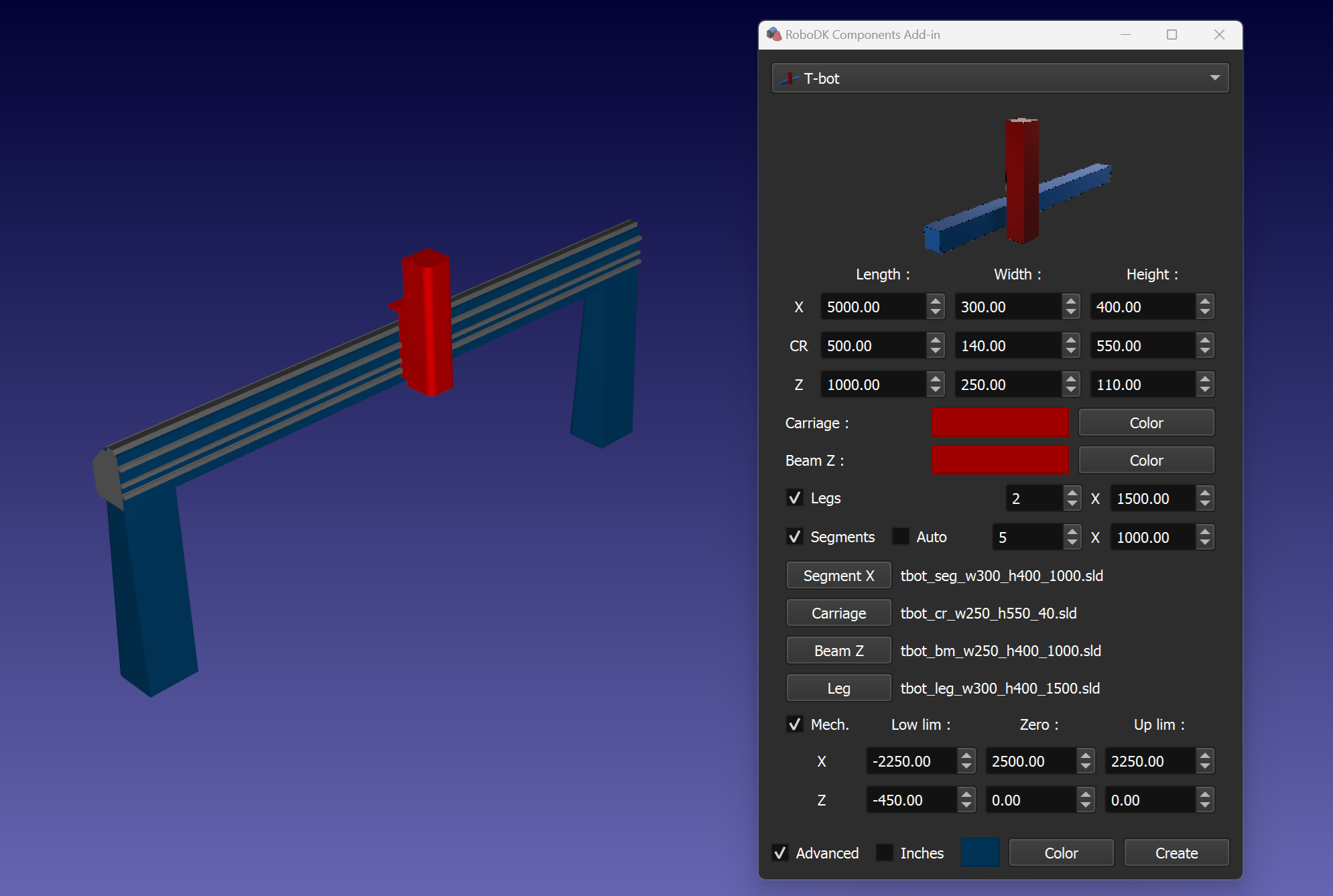
T-bot
Puede crear un robot T paramétrico estableciendo parámetros para el haz X, el carro y el haz Z.
Consejo: Puede crear un robot en T con un haz X segmentado utilizando los modelos Segmento, Haz Z y Carro. Es necesario configurar los archivos de modelo adecuados utilizando los botones Segmento X, Carro y Viga Z. Asegúrese de utilizar los valores de dimensión correctos y el número correcto de segmentos. Utilice la casilla Segmentos para construir el modelo de robot en T adecuado.
Consejo: Utilice la casilla Mecanismo para crear un mecanismo T-bot. Además, puede fijar los límites de movimiento y la posición cero de los ejes con los parámetros correspondientes.
NotaCompruebe el desplazamiento de los modelos de segmentos, viga y carro en caso de utilizar la opción Segmentos. Hay varios ejemplos en la carpeta Modelos. Por defecto, la carpeta con ejemplos de modelos es C:\RoboDK\Addins\com.robodk.app.shape\Components\models\tbot.
Consejo: Utilice la casilla Auto para establecer los parámetros basándose en las mediciones del cuadro delimitador del modelo. Los pequeños detalles del modelo pueden afectar al resultado de la medición. Puede desmarcar Auto después de la medición y establecer los parámetros manualmente.
Consejo: Utilice la casilla de verificación Patas para añadir el número necesario de columnas base de la altura especificada.
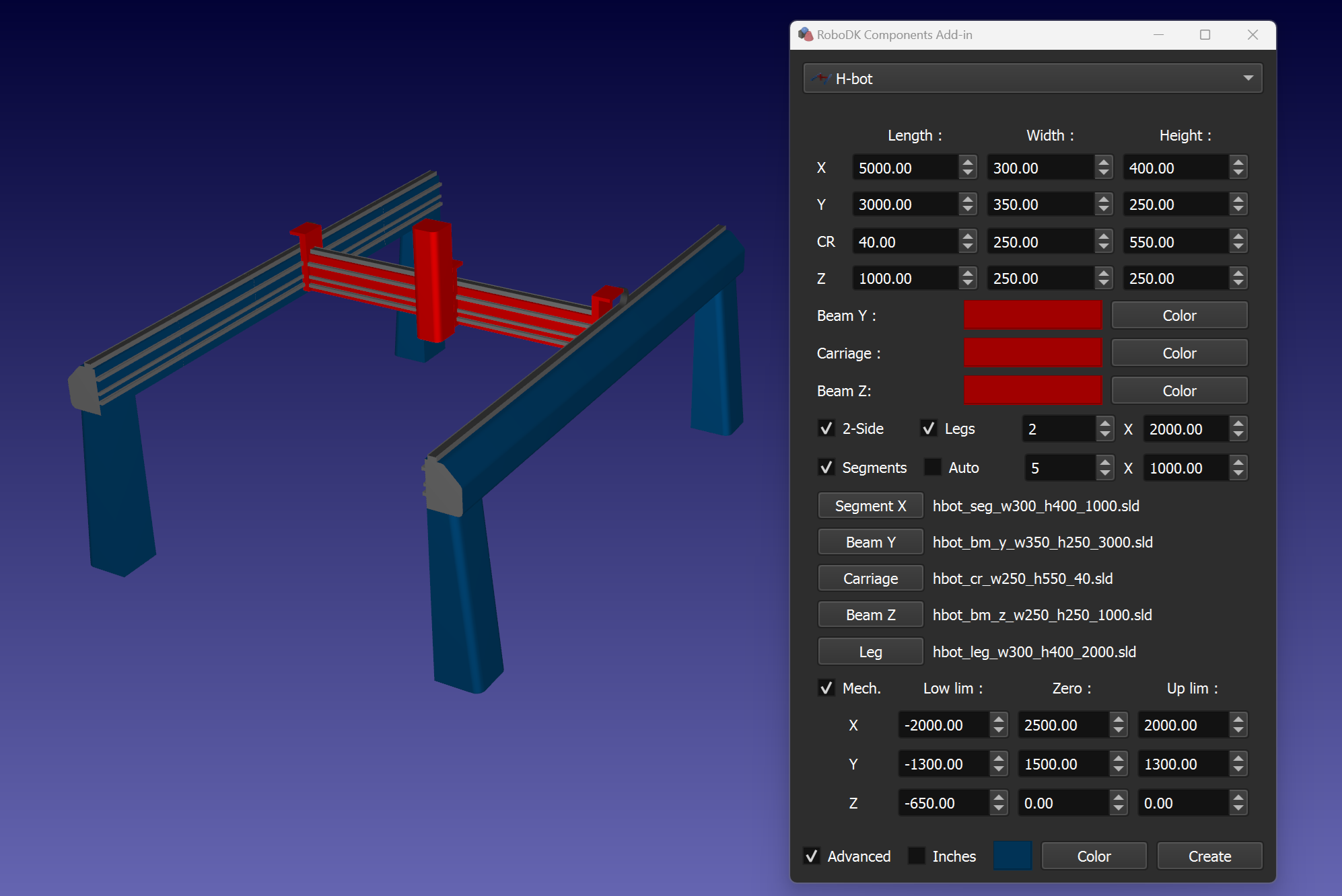
H-bot
Puede crear un robot H paramétrico estableciendo parámetros para el haz X, el haz Y, el carro y el haz Z.
Consejo: Puede crear un robot H con un haz X segmentado utilizando los modelos Segmento, Haz Y, Haz Z y Carro. Es necesario configurar los archivos de modelo adecuados utilizando los botones Segmento X, Viga Y, Carro y Viga Z. Asegúrese de utilizar los valores de dimensión correctos y el número correcto de segmentos. Utilice la casilla Segmentos para construir el modelo H-bot apropiado.
Consejo: Utilice la casilla Mecanismo para crear un mecanismo H-bot. Además, puede fijar los límites de movimiento y la posición cero de los ejes con los parámetros correspondientes.
NotaCompruebe el desplazamiento de los modelos de segmentos, viga y carro en caso de utilizar la opción Segmentos. Hay varios ejemplos en la carpeta Modelos. Por defecto, la carpeta con ejemplos de modelos es C:\RoboDK\Addins\com.robodk.app.shape\Components\models\hbot\.
Consejo: Utilice la casilla Auto para establecer los parámetros basándose en las mediciones del cuadro delimitador del modelo. Los pequeños detalles del modelo pueden afectar al resultado de la medición. Puede desmarcar Auto después de la medición y establecer los parámetros manualmente.
Consejo: Utilice la casilla de verificación Patas para añadir el número necesario de columnas base de la altura especificada.
Consejo: Utilice la casilla de verificación 2 caras para añadir una viga X reflejada.
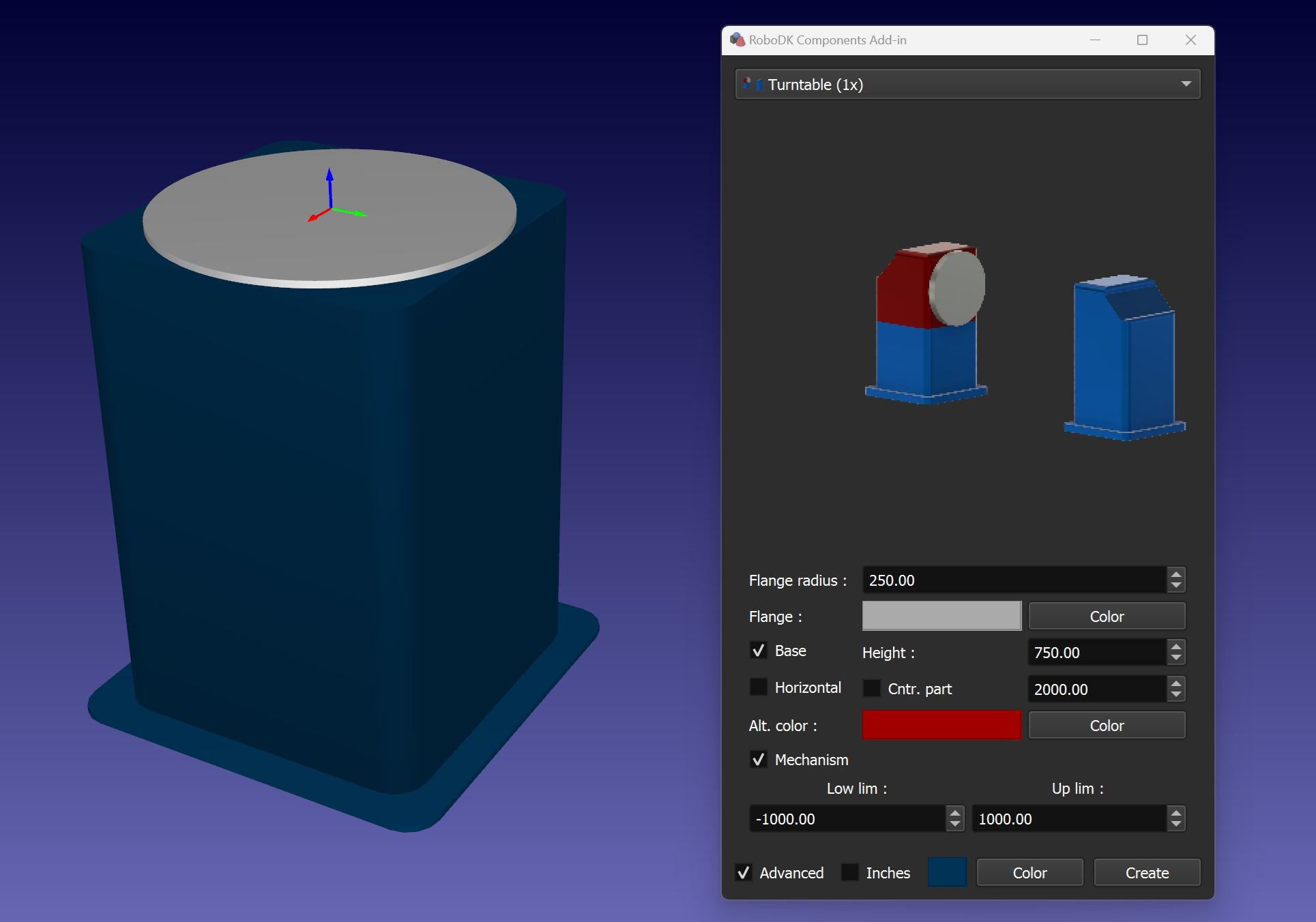
Plato giratorio (1x)
Puede crear una plataforma giratoria especificando parámetros como el radio de la brida, la altura de la base y los colores para la base y la brida.
Consejo: Utilice la casilla Base y el parámetro de altura para crear el cuerpo del posicionador.
Consejo: Puede crear un posicionador horizontal o vertical activando la casilla Horizontal. Además, puede utilizar la casilla Cntr. parte y el parámetro de desplazamiento correspondiente si necesita una contraparte.
Consejo: Utilice la casilla Mecanismo para crear un mecanismo de giro. Puede fijar adicionalmente los límites de movimiento con los parámetros correspondientes.
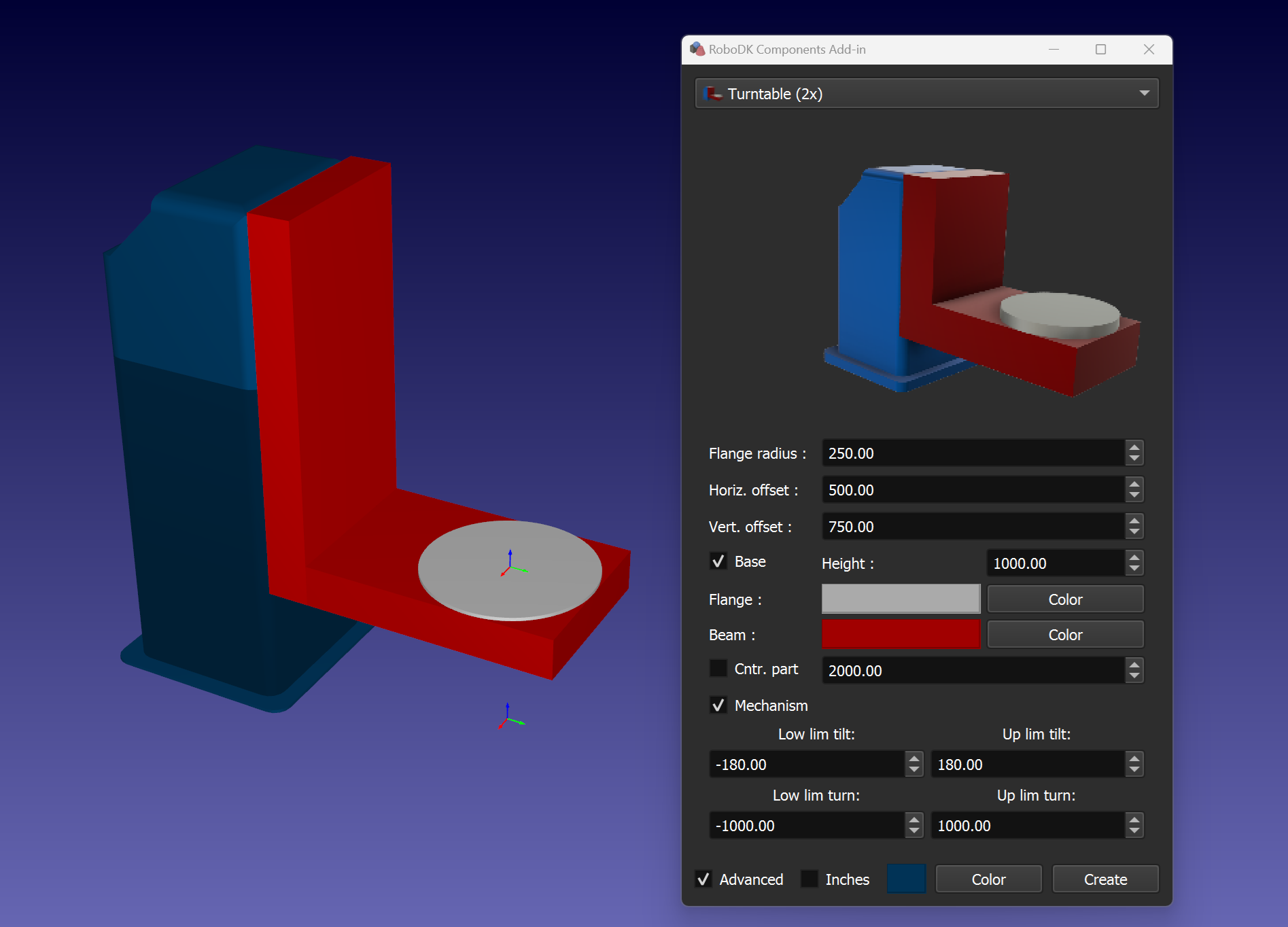
Plato giratorio (2x)
Puede crear una plataforma giratoria basculante especificando parámetros como el radio de la brida, los desplazamientos vertical y horizontal, la altura de la base y los colores de la base, la viga y la brida.
Consejo: Utilice la casilla Base y el parámetro de altura para crear la base del posicionador.
Consejo: Puede utilizar la casilla Cntr. parte y el parámetro de desplazamiento correspondiente si necesita una contraparte.
Consejo: Utilice la casilla Mecanismo para crear un mecanismo de giro inclinable. Además, puede establecer los límites de movimiento con los parámetros correspondientes.
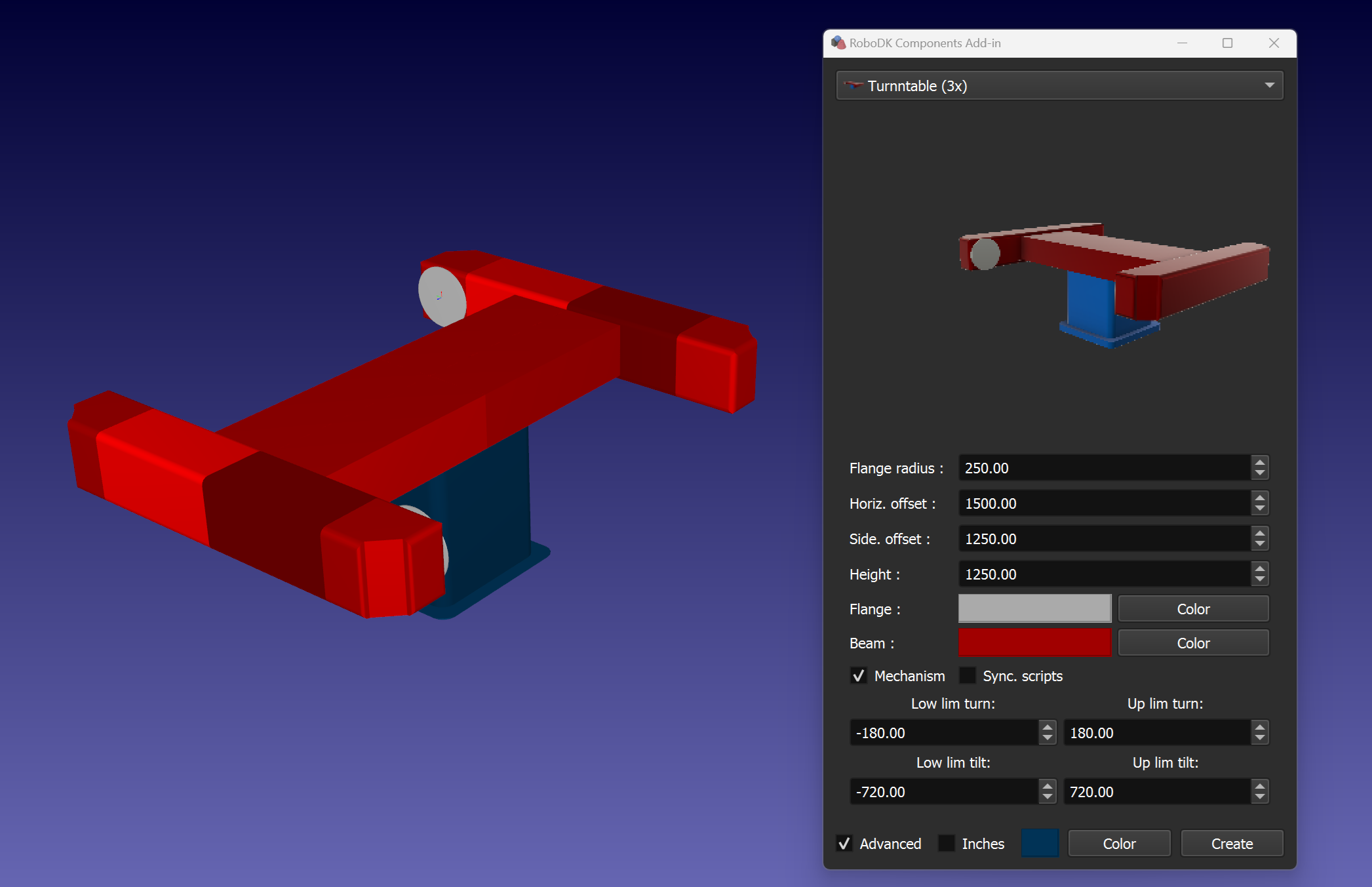
Plato giratorio (3x)
Puede crear un posicionador de 3 ejes especificando parámetros como el radio de la brida, los desplazamientos laterales y horizontales, la altura y los colores de la base, la viga y las bridas.
Consejo: Utilice la casilla Mecanismo para crear un mecanismo posicionador de 3 ejes. Puede fijar adicionalmente los límites de movimiento con los parámetros correspondientes.
Consejo: Utilice la casilla de verificación Scripts de sincronización para crear scripts Python adicionales que sincronizarán el robot con el eje horizontal requerido mediante la ejecución del script correspondiente.
Nota: Por defecto, C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ es la carpeta que contiene los ejemplos de scripts de sincronización.
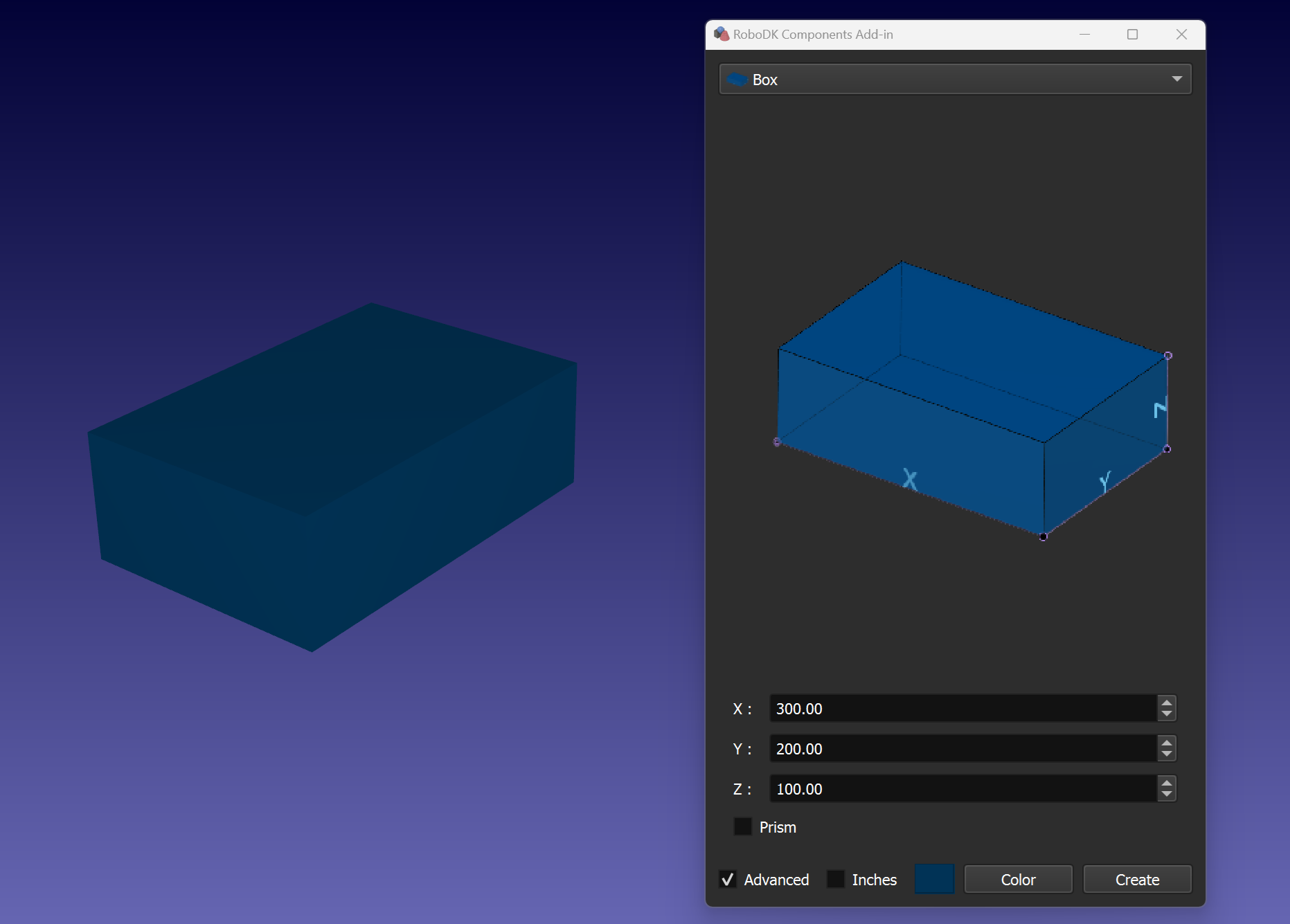
Caja
Puede crear una caja especificando las dimensiones (X, Y, Z).
Consejo: Utilice la casilla Prisma para crear un prisma.
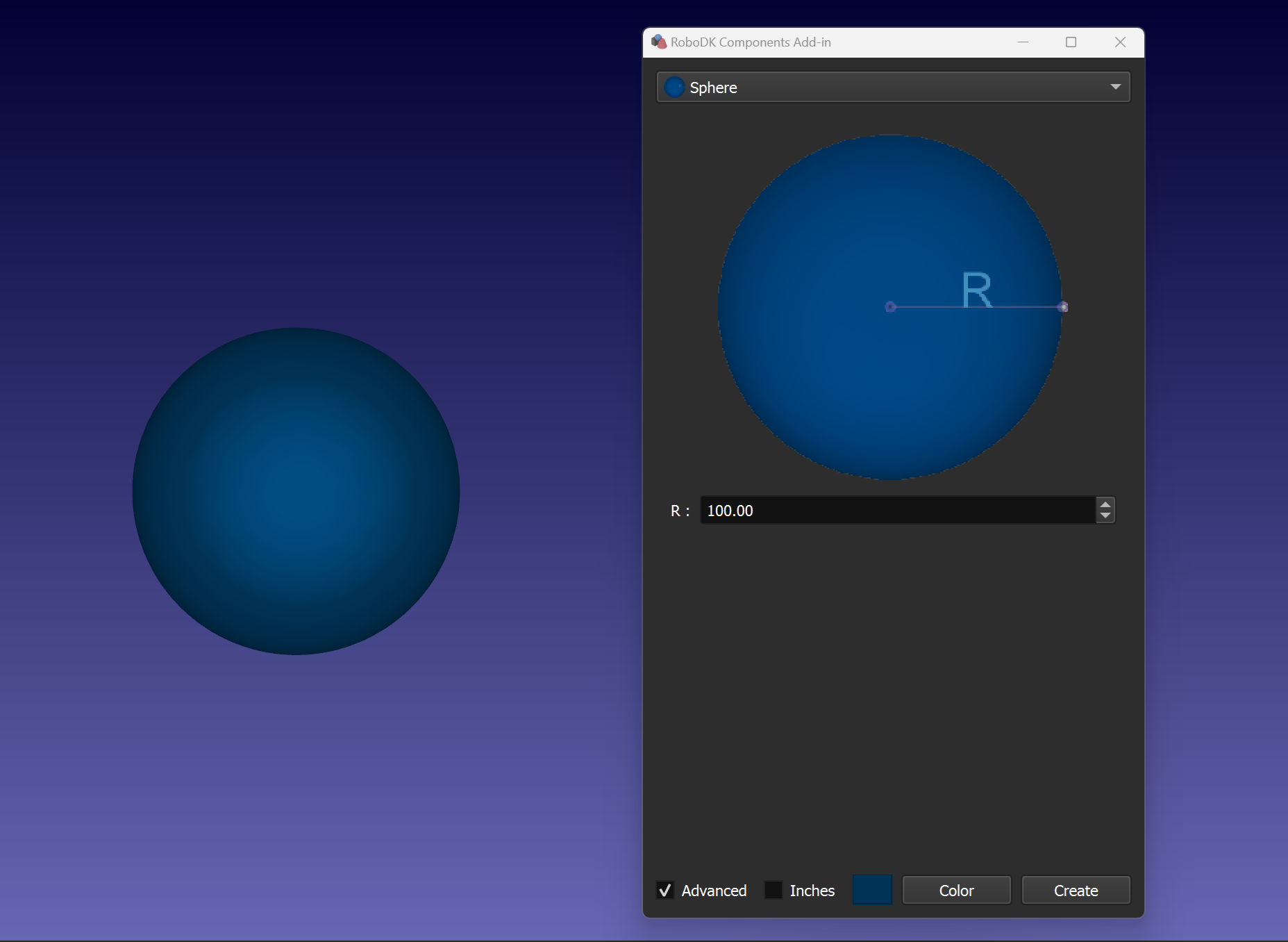
Esfera
Puede crear una esfera especificando el radio (R).
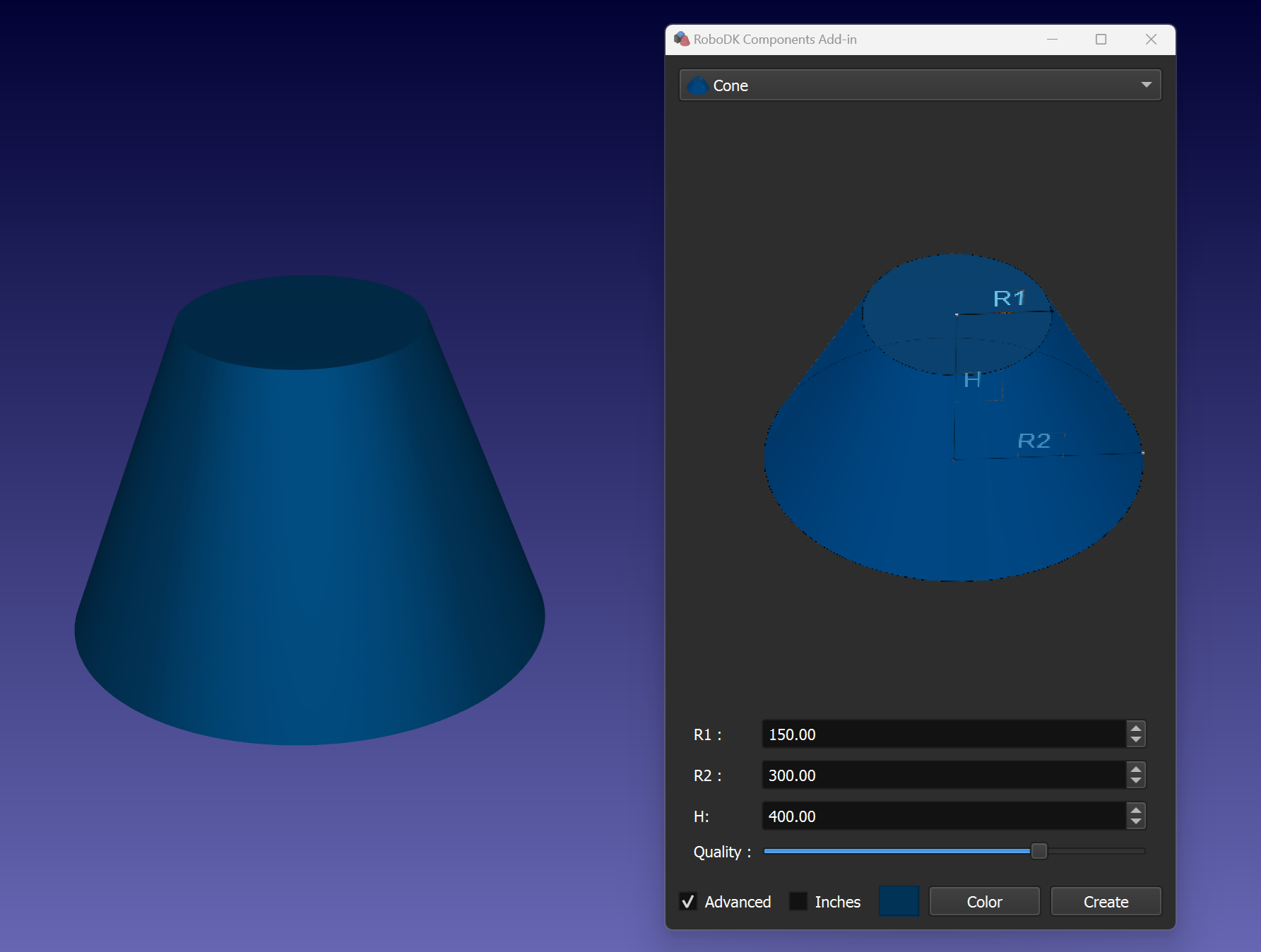
Cono
Puede crear un cono especificando las dimensiones (R1, R2, H) y los parámetros de calidad.
Consejo: Si R1 es igual a R2, se creará un cilindro.