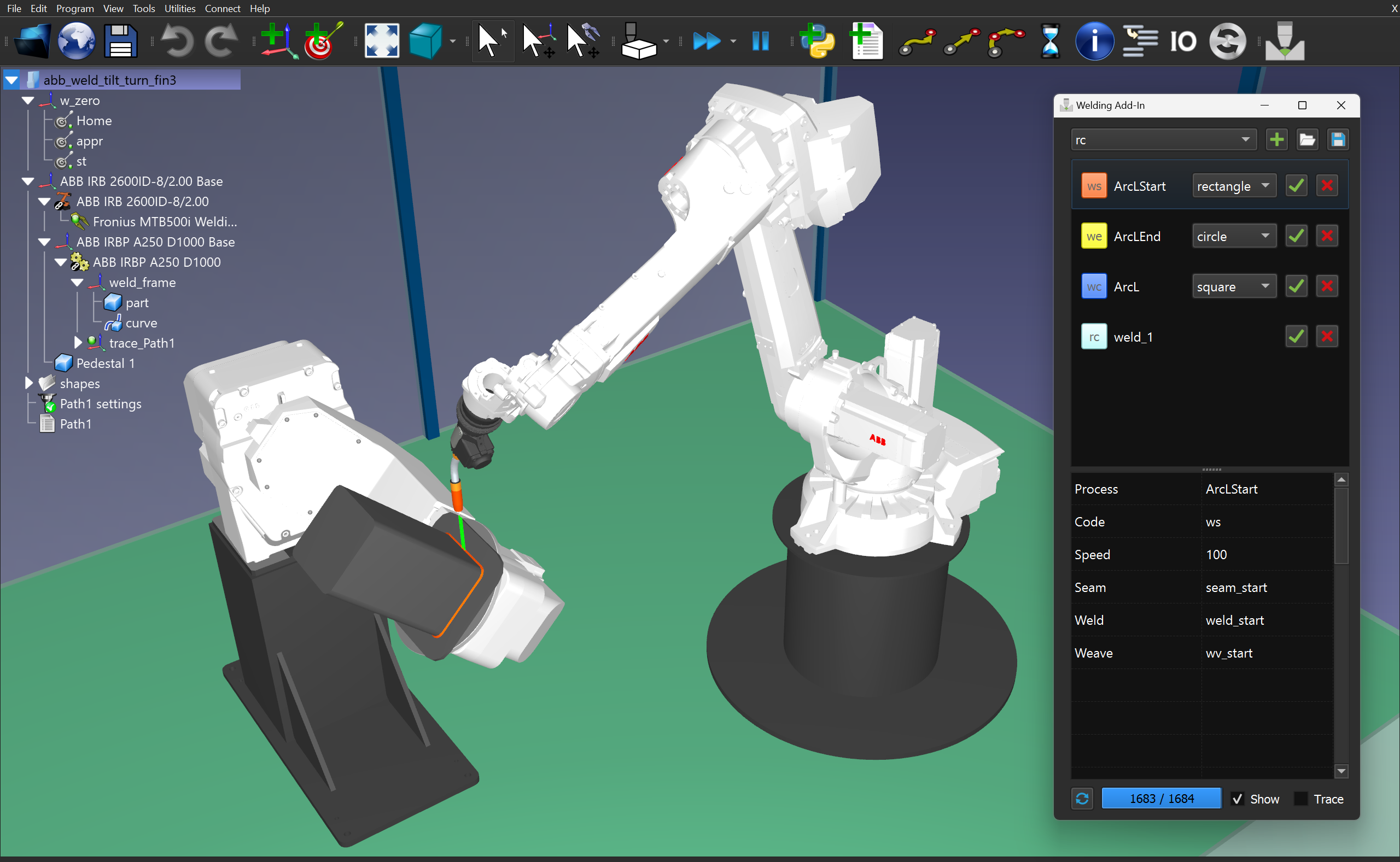
Addin de soldadura
El Addin de soldadura de RoboDK le permite aplicar diferentes instrucciones y recetas de soldadura con los programas de RoboDK y visualizarlas adecuadamente.
Con el Addin de soldadura de RoboDK, podrá hacer lo siguiente:
1.Cree y añada fácilmente comandos, como los de inicio, continuación y fin de soldadura
2.Defina una lista de parámetros para los comandos creados (específicos para soldadura y visualización)
3.Visualizar la trayectoria como un modelo sólido
4.Visualice la creación de soldaduras (adición de material) utilizando una forma/perfil de soldadura predefinido
5.Cree y añada fácilmente instrucciones de inserción de código personalizadas
6.Guarde todos los datos creados en el proyecto de estación
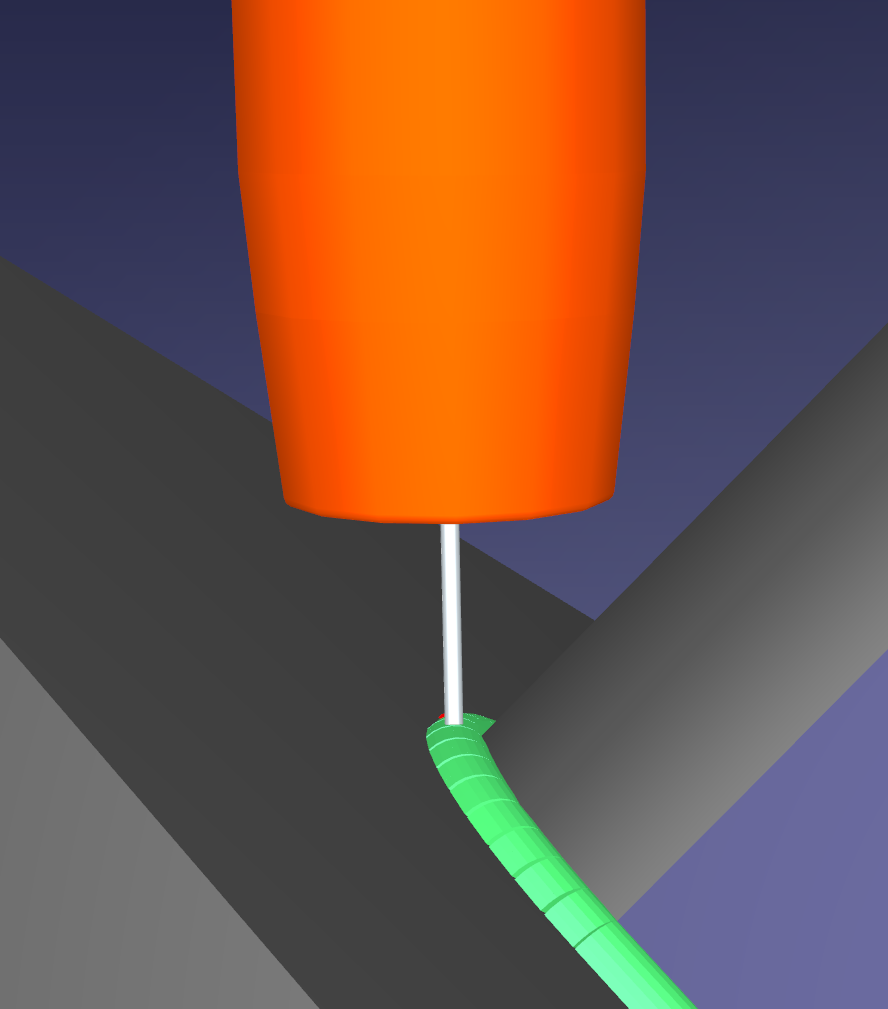
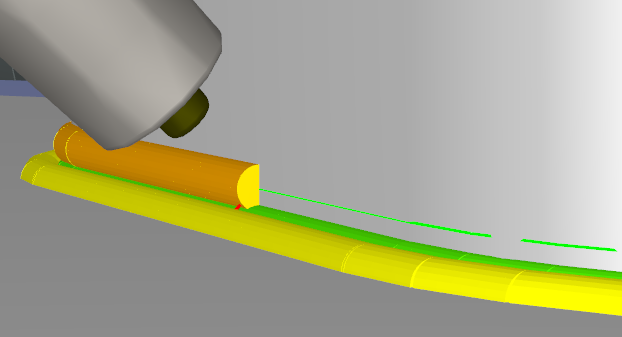
La siguiente imagen muestra una vista previa de la traza de soldadura.
Cómo instalar
Puede descargar e instalar la última versión del Addin de soldadura desde la biblioteca de Addins del RoboDK. La instalación es automática utilizando el Gestor de Addins.
Interfaz de soldadura
Esta sección cubre las funcionalidades disponibles de la interfaz de usuario del Addin de soldadura.
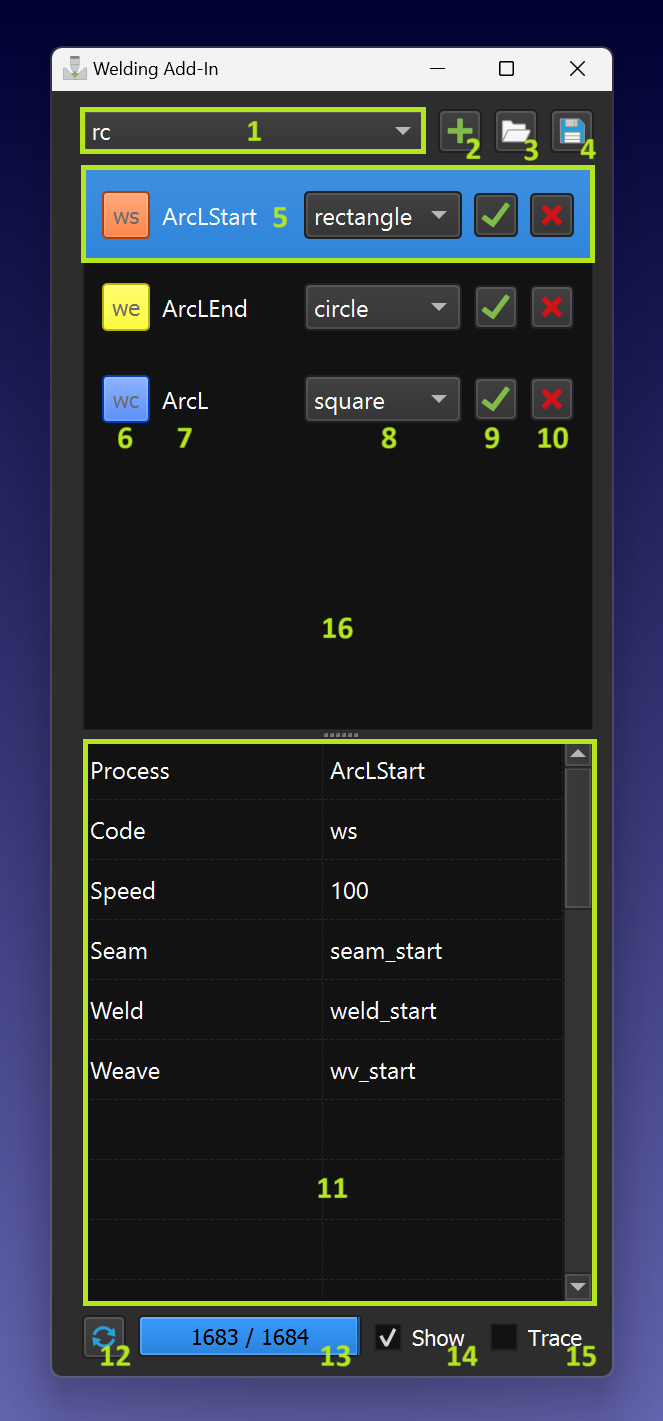
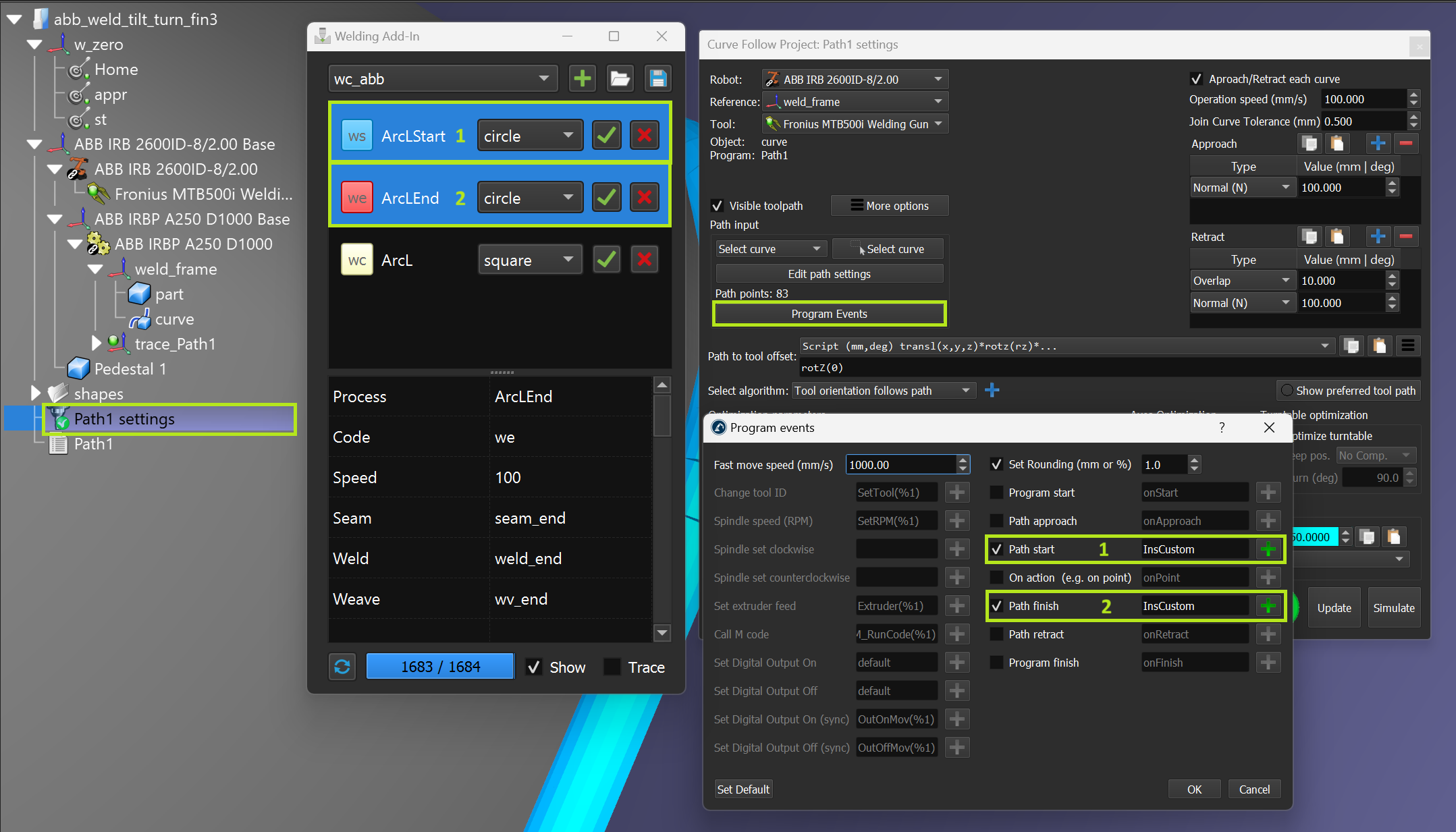
El Addin de soldadura contiene los siguientes elementos funcionales:
1.Menú desplegable de selección de instrucciones.
2.Instrucción que se añade a la lista de instrucciones.
3.Importar lista de instrucciones.
4.Exportar lista de instrucciones.
5.Instrucción actual (seleccionada).
6.Código de instrucciones y color del icono (pulse para cambiar el color).
7.Nombre de la instrucción (único).
8.Forma de trayectoria adecuada.
9.Añada instrucciones a la secuencia del programa o al PPC.
10.Borrar instrucción de la lista.
11.Parámetros vinculados a la instrucción seleccionada.
12.Construya un modelo de trayectoria.
13.Progreso en la construcción del modelo de ruta.
14.Bandera de visibilidad del modelo de ruta.
15.Bandera de trazado del camino (permite simular la adición del material).
16.Área de la lista de instrucciones.
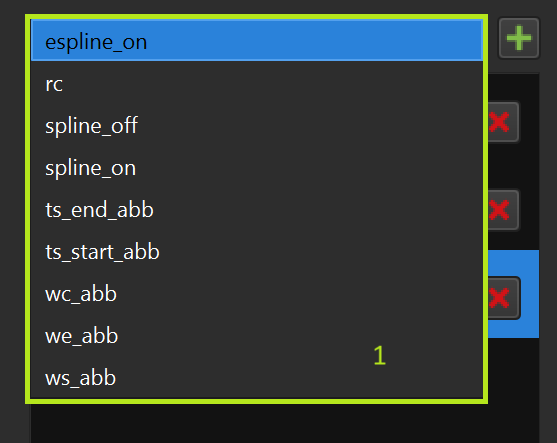
Menú desplegable de selección de instrucciones
Puede seleccionar la instrucción que desea añadir en el menú desplegable:
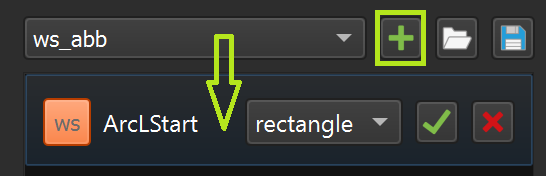
Añadir una instrucción a la lista de instrucciones
Puede añadir la instrucción seleccionada desde el menú desplegable utilizando el botón "+":
Las plantillas de instrucciones se encuentran en la siguiente carpeta (instalación por defecto de RoboDK):
C:\RoboDK\Addins\com.robodk.app.welding\WeldingAddIn\templates
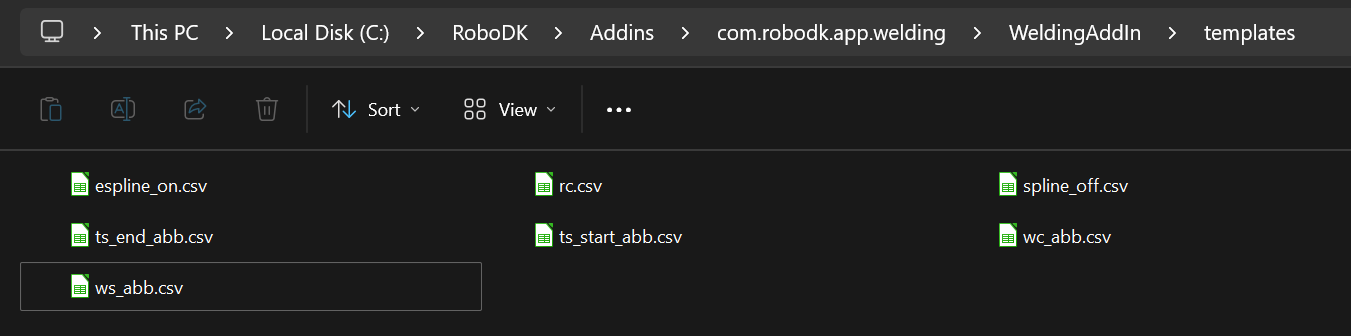
Las plantillas se presentan como archivos regulares '.csv' con el formato de cadena 'parámetro->valor':
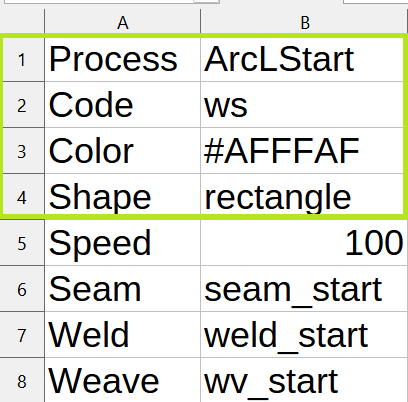
1.'Proceso'➔ 'Nombre del proceso' (debe especificarse algún nombre)
2.'Código'➔ 'Código de instrucción' (uno de los códigos de instrucción admitidos)
3.'Color➔cualquier código de color en formato hexadecimal
4.'Shape➔nombre del archivo con el modelo de forma para las instrucciones de soldadura
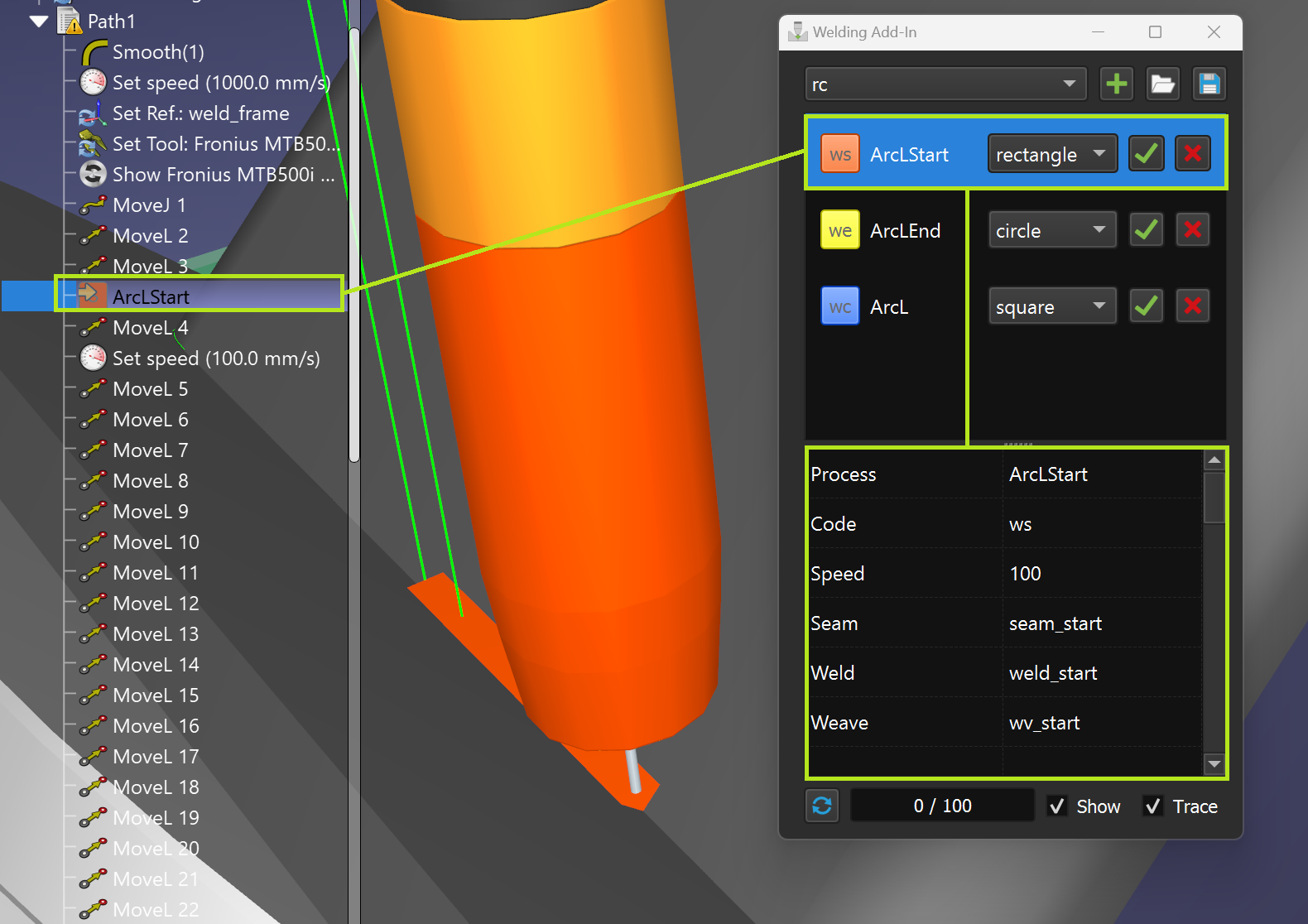
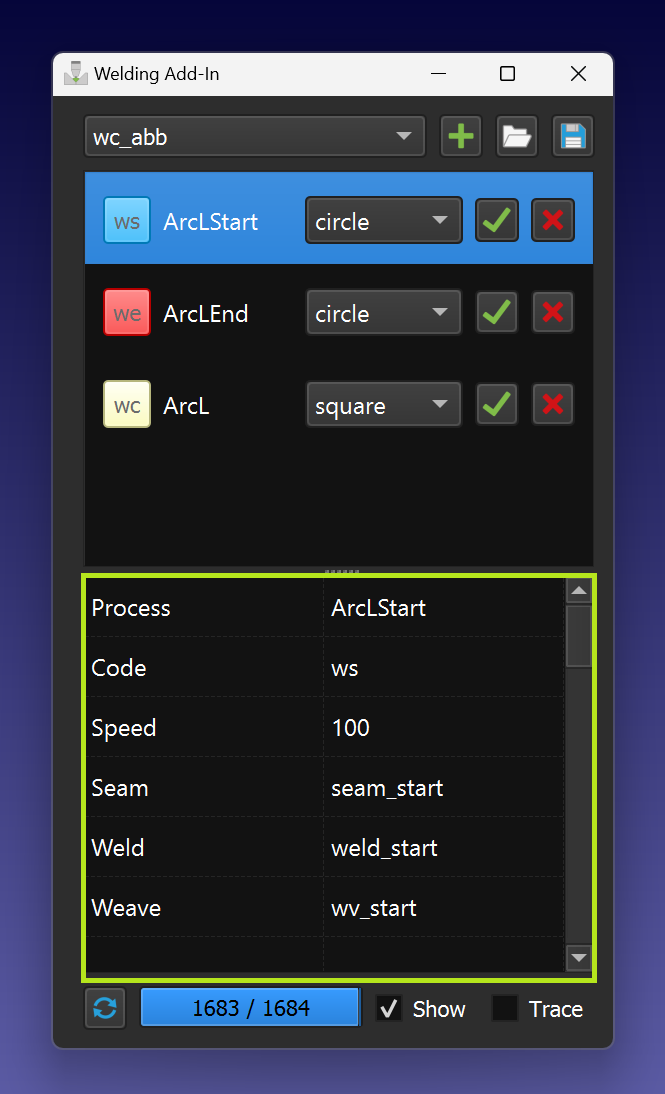
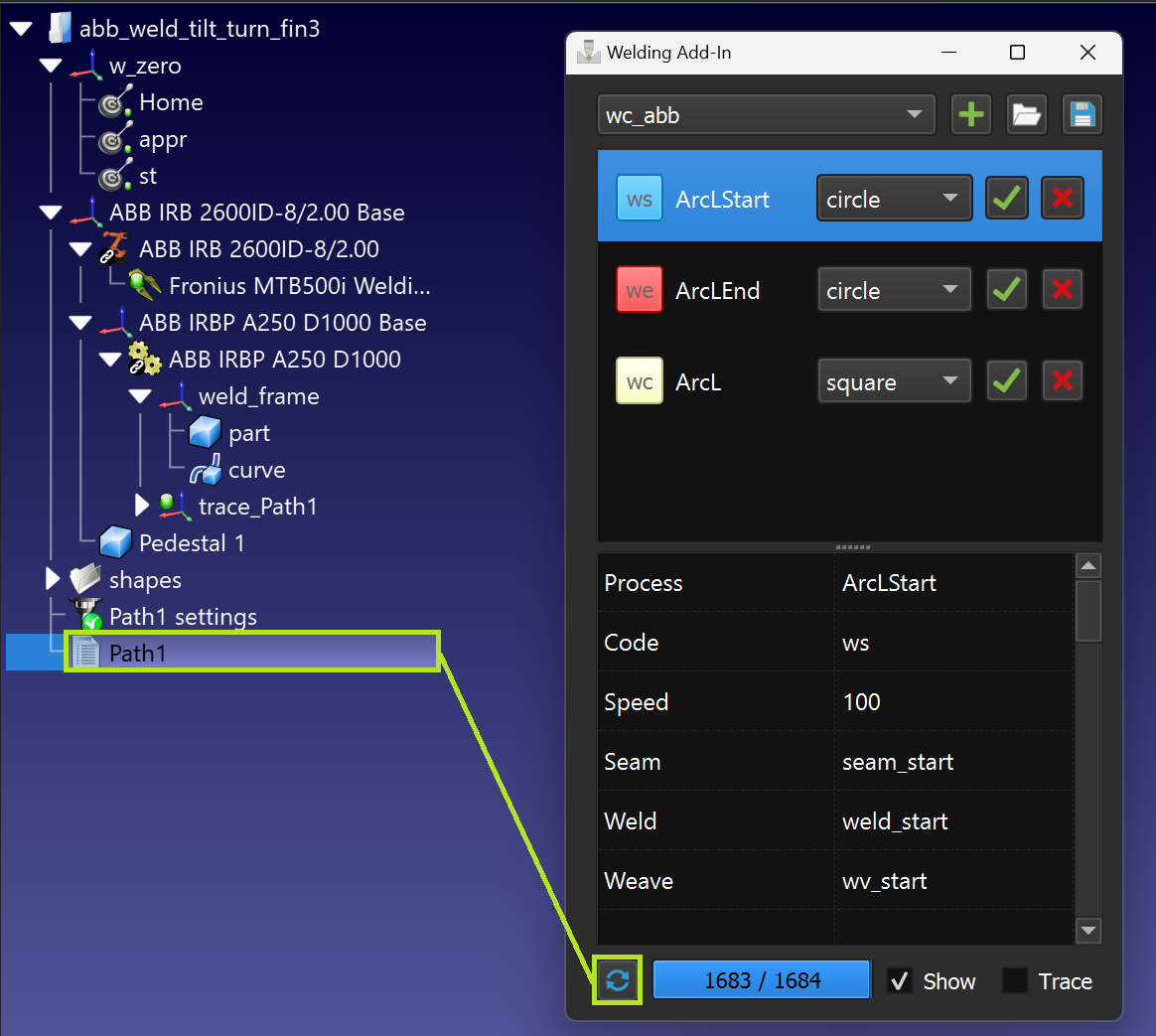
Instrucción actual (seleccionada)
Puede acceder a los parámetros seleccionando una línea en la lista de instrucciones (9). Además, la línea de instrucción se resalta automáticamente durante la ejecución del programa o cuando se hace doble clic en la instrucción de programa correspondiente:
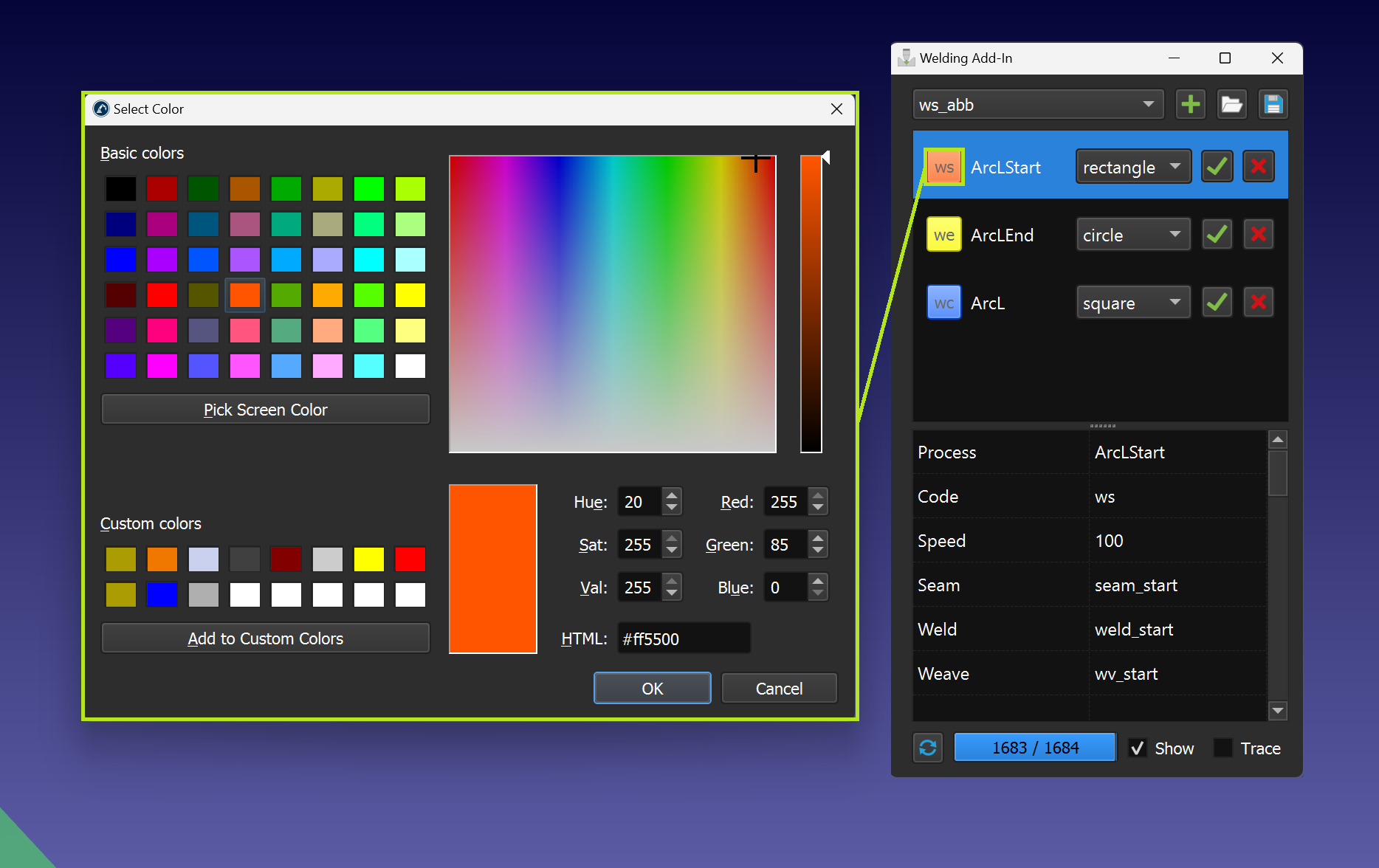
Código de instrucciones y color del icono
Puede fijar el color de la instrucción y la ruta correspondiente pulsando el botón de código de instrucción (asegúrese de que la línea de instrucción está seleccionada en primer lugar):
1.ws - instrucción de inicio de soldadura
2.wc - soldadura continuar instrucción
3.we - instrucción de fin de soldadura
4.rc - instrucción personalizada Insertar código
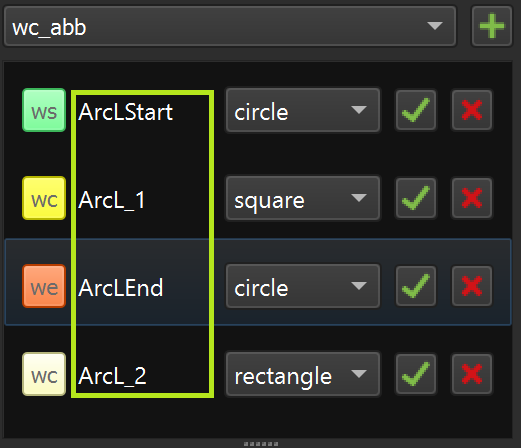
Nombre de la instrucción
Cada instrucción de la lista de instrucciones debe tener un nombre único (valor del parámetro 'Proceso'):
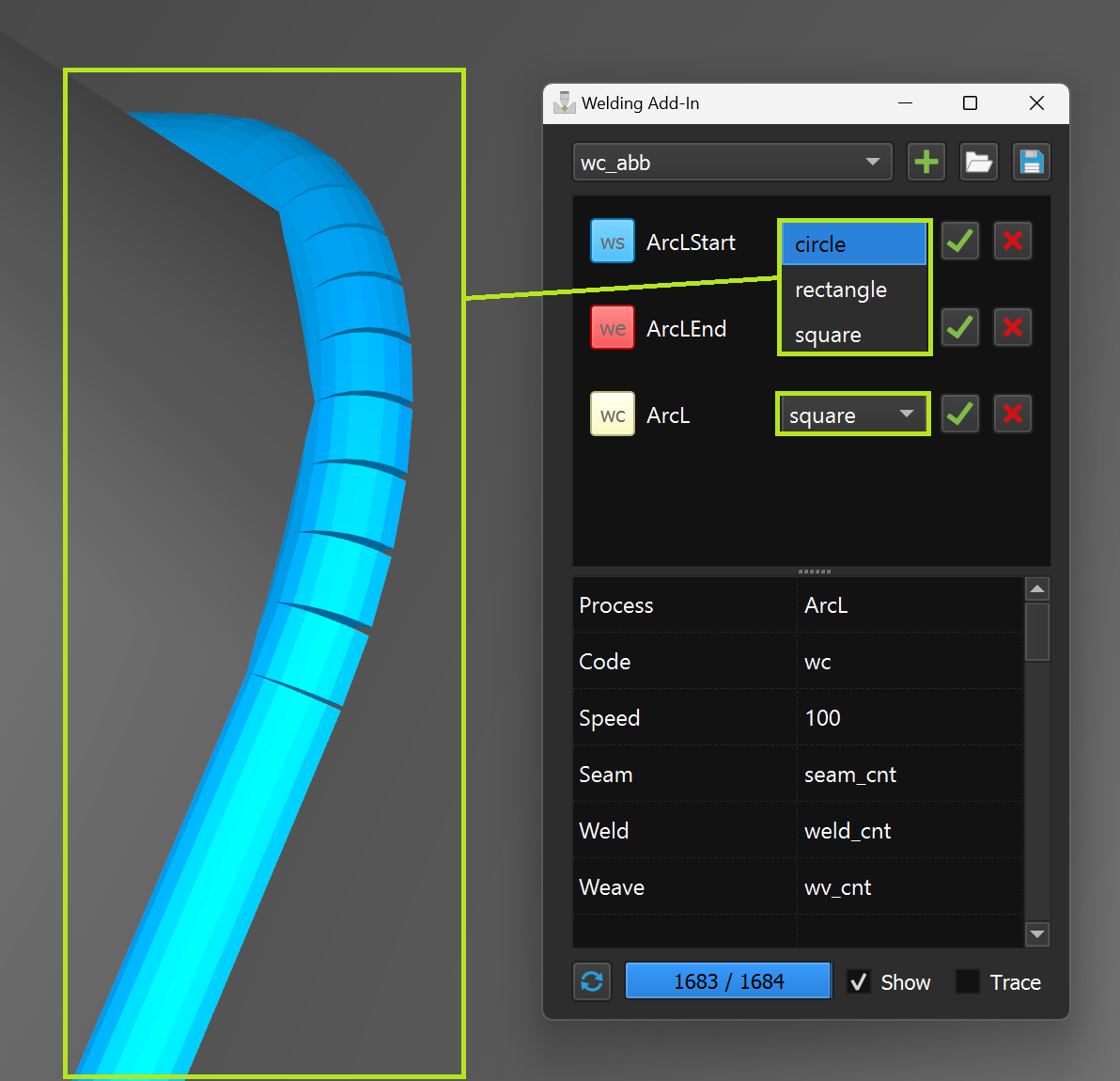
Forma de trayectoria
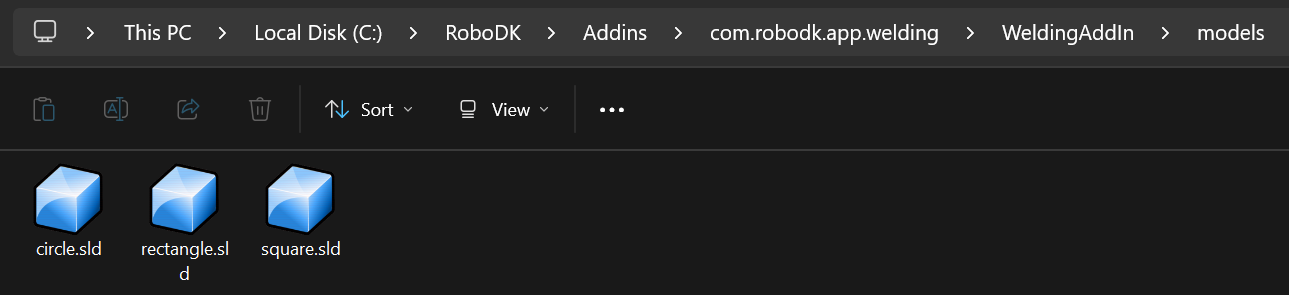
Si la plantilla de instrucciones tiene una definición de forma de trayectoria, podrá seleccionarla en el menú desplegable:
C:\RoboDK\Addins\com.robodk.app.welding\WeldingAddIn\models
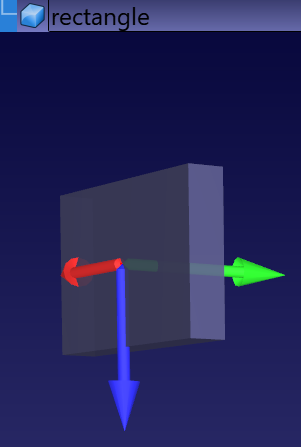
Sugerencia: Si añade su propio modelo de elemento de recorrido, puede consultar uno de los modelos suministrados para ver cómo colocar correctamente el elemento de recorrido en relación con el sistema de coordenadas mundo:
Añadir instrucciones a la secuencia del programa
Se puede añadir una única instrucción o un par de instrucciones seleccionadas secuencialmente a una secuencia de programa de RoboDK.
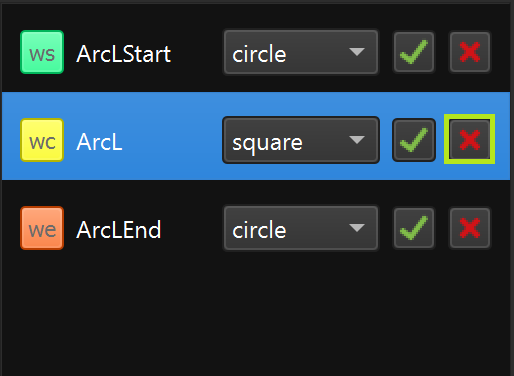
Borrar instrucción de la lista
Puede eliminar una instrucción de la lista de instrucciones pulsando el botón "X".
Parámetros
Puede cambiar los parámetros directamente en la tabla de parámetros. Los cambios pueden guardarse automáticamente.
Parámetros de importación/exportación
Puede importar toda la lista de instrucciones con parámetros o exportar todos los datos utilizando las funciones de importación/exportación.

Construcción de senderos
Puede construir la ruta utilizando la función "Construir" para el programa seleccionado (es necesario que contenga instrucciones de soldadura).
Trazado de rutas
Activando la opción "Trazar", es posible ver cómo se aplica el material de soldadura a medida que el robot se desplaza por la trayectoria de soldadura.

Postprocesadores compatibles
El Addin de soldadura ofrece funciones de simulación y programación fuera de línea. Se añaden instrucciones al programa de salida específicas para el controlador de su robot. Cada vez son más los postprocesadores que admiten las instrucciones del Addin de soldadura, entre ellos:
1.ABB RAPID IRC5
2.ABB RAPID S4C
3.Fanuc R30i
4.Kawasaki
5.KUKA KRC2 DAT
6.Motoman
Póngase en contacto con nosotros para añadir soporte a un controlador específico.
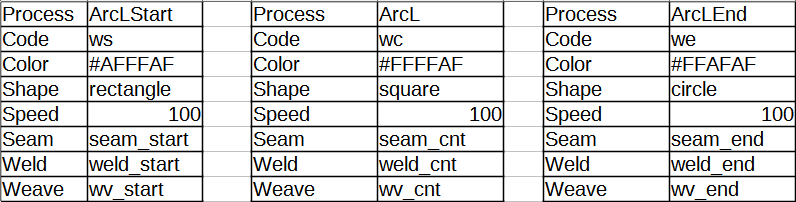
Plantillas de soldadura ABB
Las plantillas abb_ws.csv, abb_wc.csv y abb_we.csv se utilizan como plantillas de soldadura ABB para los comandos de inicio de soldadura (ArcLStart), continuación de soldadura (ArcL) y fin de soldadura (ArcLEnd) respectivamente. Los parámetros 'Seem', 'Weld' y 'Weave' de estas plantillas deben ser iguales a los nombres de las variables de soldadura correspondientes en el controlador real.
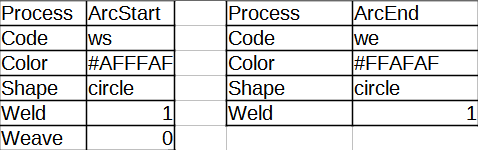
Plantillas de soldadura Fanuc
Las plantillas fanuc_ws.csv y fanuc_we.csv se utilizan como plantillas de soldadura Fanuc para los comandos ArcStart y ArcEnd respectivamente. ArcStart puede utilizarse de nuevo para cambiar el modo de soldadura directamente en el proceso. Los parámetros 'Weld' y 'Weave' de estas plantillas deben ser iguales a los valores de las variables de soldadura correspondientes en el controlador real.
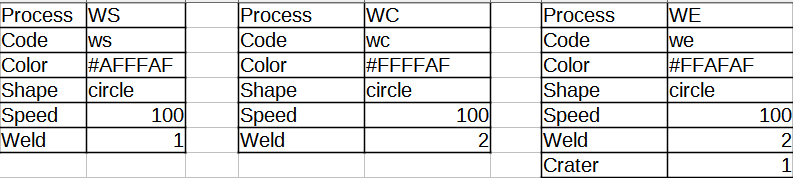
Plantillas de soldadura Kawasaki
Las plantillas kawasaki_ws.csv, kawasaki_wc.csv y kawasaki_we.csv se utilizan como plantillas de soldadura Kawasaki para los comandos de inicio de soldadura (WS), continuación de soldadura (WC) y fin de soldadura (WE) respectivamente. Los parámetros 'Soldadura' y 'Cráter' de estas plantillas deben ser iguales a las variables de soldadura correspondientes en el controlador real (por ejemplo, los números W1SET y W2SET).
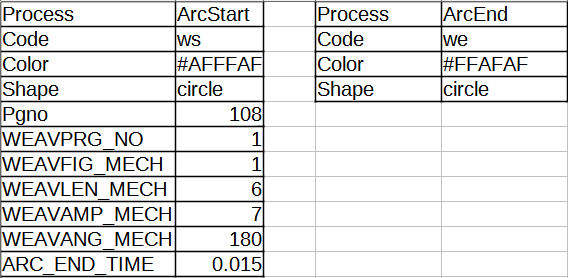
Plantillas de soldadura KUKA
Las plantillas kuka_ws.csv y kuka_we.csv se utilizan como plantillas de soldadura KUKA para los comandos ArcStart y ArcEnd respectivamente. Los parámetros de la plantilla ArcStart deben ser iguales a los valores de las variables de soldadura correspondientes en el controlador real.
Plantillas de soldadura Motoman
Las plantillas motoman_ws.csv, motoman_wc.csv y motoman_we.csv se utilizan como plantillas de soldadura Motoman para los comandos de inicio de soldadura (ARCON), continuación de soldadura (ARCSET) y fin de soldadura (ARCOF) respectivamente. Los parámetros 'ASF', 'ACOND' y 'AEF' de estas plantillas deben ser iguales a los valores de las variables de soldadura correspondientes en el controlador real.
