Configure la cámara simulada
Para superponer con precisión los activos de la estación sobre la alimentación de vídeo, debe crearse una cámara simulada. Esta cámara simulada utiliza la pose de la cámara y la trayectoria calculada utilizando los marcadores fiduciales para grabar la estación RoboDK desde el mismo ángulo, distancia y trayectoria que la alimentación de vídeo de entrada.
La resolución de esta cámara simulada debe coincidir con la del vídeo de entrada para que el escalado del marcador sea preciso. A continuación se describen los pasos para añadir una cámara virtual a la estación:
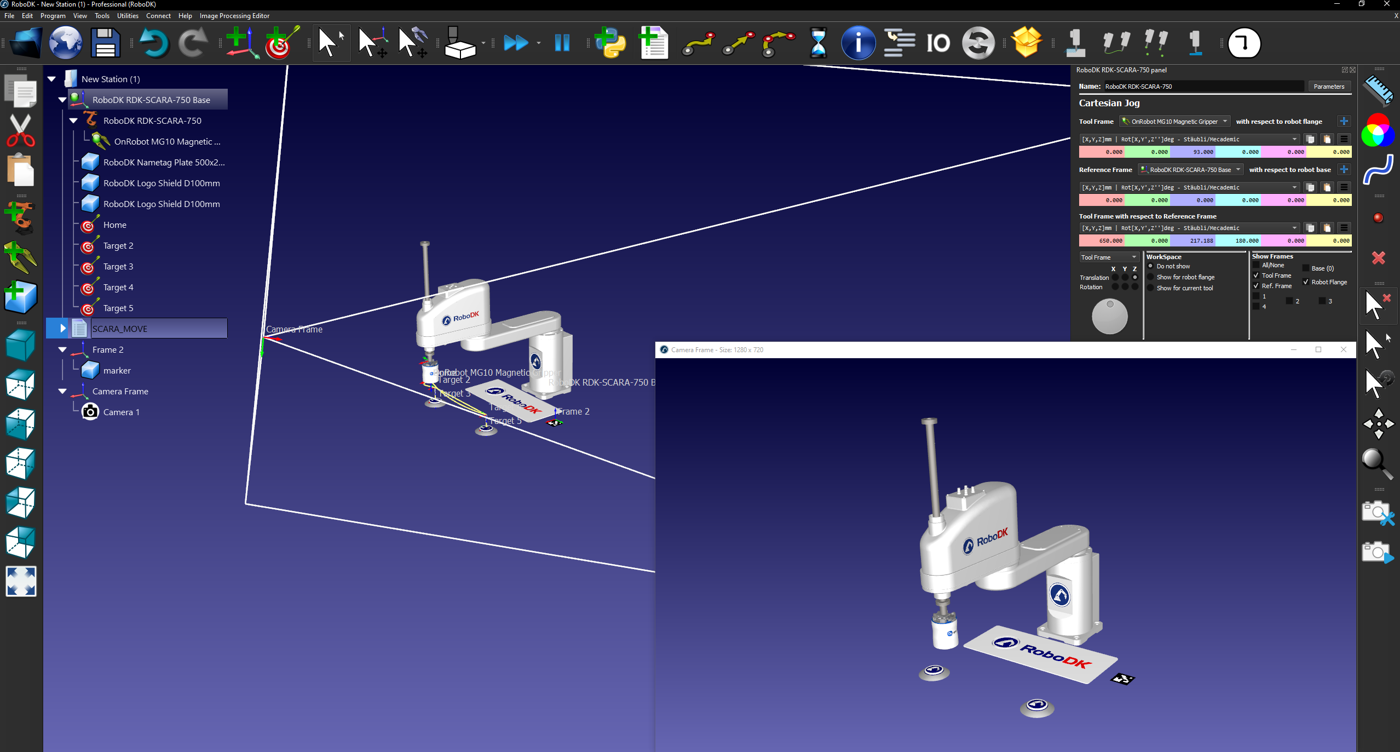
1.Añada una cámara a su estación seleccionando Editor de procesamiento de imágenes à Añadir una cámara RoboDK en la barra de herramientas.
2.Haga clic con el botón derecho del ratón en la cámara o en el canal de la cámara y seleccione "Ajustes de la cámara".
3.Ajuste la configuración de la cámara virtual para que coincida con la resolución de la fuente de vídeo de entrada.
4.Alinee el sistema de coordenadas para que la cámara simulada pueda ver el marcador virtual Aruco.
Para obtener los mejores resultados, el vídeo físico de entrada debe grabarse teniendo en cuenta las siguientes consideraciones:
1.Coloque el marcador sobre una superficie plana en un entorno bien iluminado. Para obtener resultados óptimos, tenga en cuenta el tamaño y la distancia de los objetos de la estación virtual con respecto al marcador y al entorno de grabación.
2.Ajustes coherentes de la cámara (las cámaras real y simulada deben tener ajustes de resolución coincidentes).
3.Identificación legible de Aruco (La cámara debe mantener la identificación legible. Cosas a evitar: Tomas rápidas/borrosas, Baja resolución de la cámara, Alta distancia del marcador a la cámara).
4.Asegúrese de que el vídeo está en formato .mp4 o .avi