Importar el marcador
Debe importar el marcador en RoboDK para indicar dónde se encuentra la ubicación del marcador con respecto al robot y a otros objetos.
Siga estos pasos para colocar correctamente el marcador:
1.En su estación RoboDK, cree un nuevo sistema de coordenadas.
2.Haga clic con el botón derecho en el nuevo sistema de coordenadas y seleccione "Añadir elemento...".
3.Busque y seleccione el marcador PNG creado con el Generador de marcadores fiduciales.
4.Ajuste la escala del marcador virtual para que coincida con el tamaño del marcador real:
Ejemplo: El marcador Charuco Diamond tiene por defecto 106,186mm x 106,186mm. Si el tamaño del marcador impreso es de 280 mm x 280 mm, habrá que aplicar un factor de escala de 2,63688 → ( 280 / 106,186 ). Esto puede hacerse haciendo doble clic en el objeto marcador, seleccionando Más opciones à Aplicar escala.
5.Alinee el centro del marcador con el origen del sistema de coordenadas, con el eje Y apuntando al ID superior.
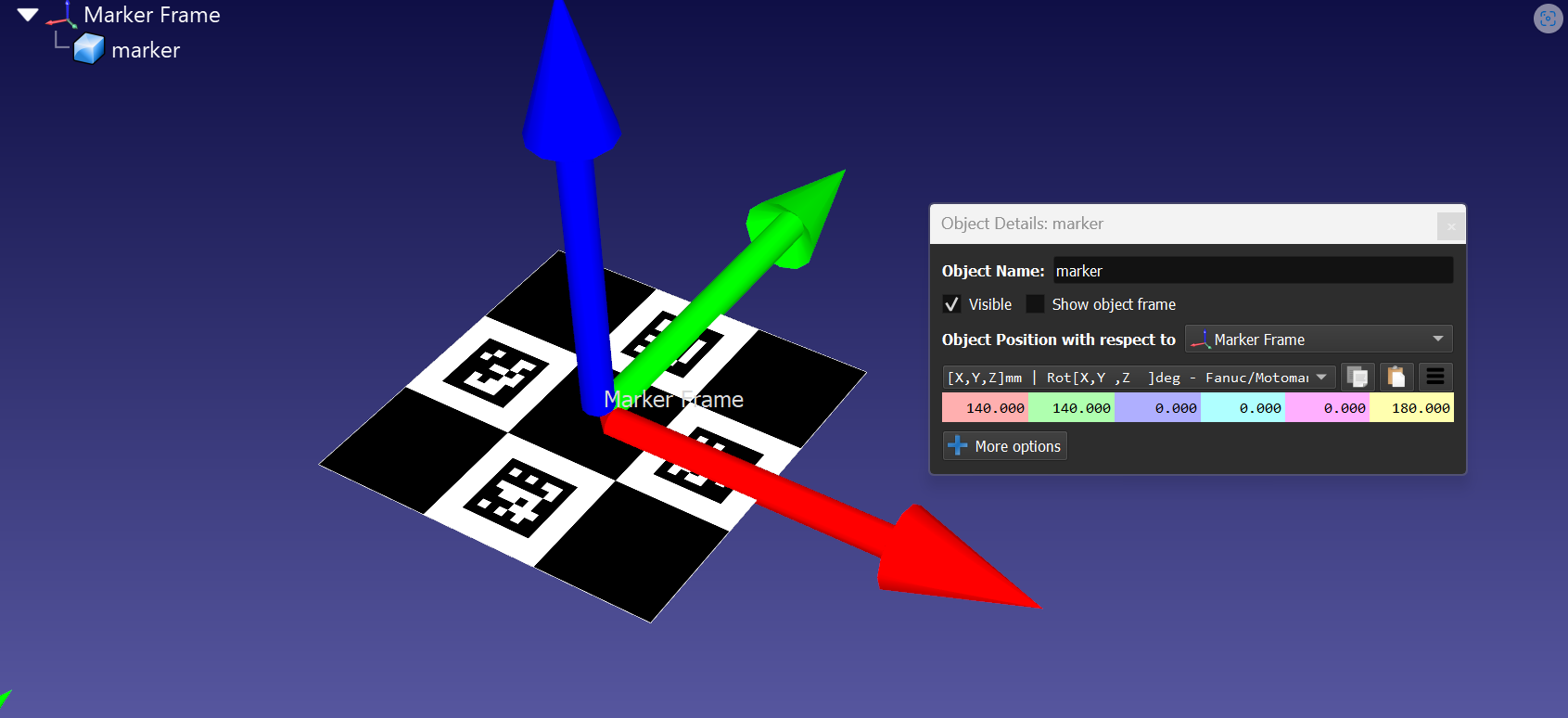
Ejemplo: Para mover el marcador, haga doble clic en el objeto marcador y modifique la posición del objeto con respecto al marco del marcador. Para nuestro ejemplo, era necesario mover el marcador 140 mm en X, desplazarlo 140 mm en Y y girarlo 180° en el eje Z. Vea en la imagen inferior un ejemplo de la posición correcta.
6.Coloque el marco marcador en la estación para alinear los objetos de la estación con respecto al marcador.