Empezar
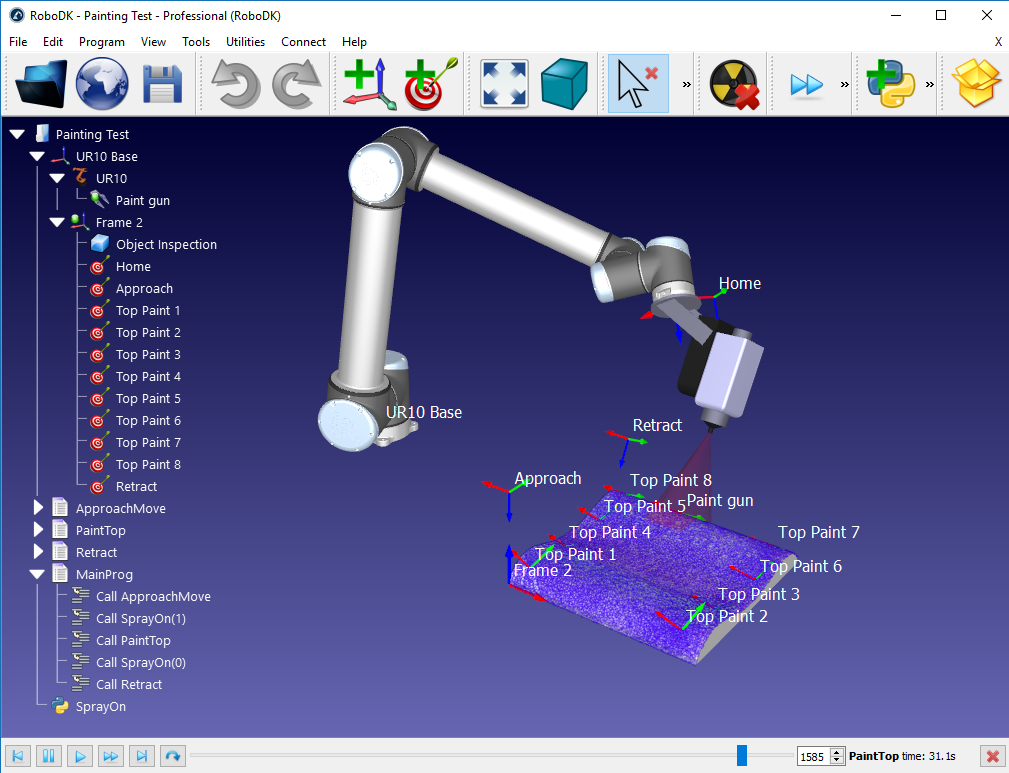
La Sección Empezarmuestra cómo construir un proyecto de fuera de linea (off-line programming) para una aplicación de pintura robótica con RoboDK. El ejemplo proporciona una visión general de algunas de las características claves de RoboDK para simulación y programación fuera de línea, incluyendo:
●Cómo cargar un robot desde la 
●Cómo 
●Cómo 
●Cómo 
●Cómo 
●Cómo 
●Cómo 
●Cómo 
Este ejemplo está disponible en la biblioteca de RoboDK como Tutorial-UR-Painting.rdk (ubicado por defecto en C:/RoboDK/Library/).