Sistemas de Coordenadas
Un sistema de coordenadas (o referencia) define la ubicación de un elemento respecto a otro elemento con una posición y orientación determinadas. Un elemento puede ser un objeto, un robot u otro sistema de coordenadas. Todas las aplicaciones de programación fuera de linea requieren la definición de un sistema de coordenadas para localizar el objeto con respecto a un robot para actualizar la simulación de forma adecuada.
Arrastre y suelte cualquier sistema de referencia u objeto dentro del Árbol de la Estación para definir una relación específica, tal como el sistema de coordenadas anidado que se muestra en la siguiente imagen.
Se suele definir la ubicación de uno o más sistemas de referencia con respecto al robot tomando 3 puntos. Esto permite colocar objetos en el espacio virtual. El procedimiento se puede llevar a cabo utilizando el control del robot o RoboDK (más información disponible en la sección Definir Sistema de Referencia).

Con RoboDK es posible introducir manualmente los valores de traslación y rotación, incluyendo diferentes órdenes de rotación de los ángulos de Euler.
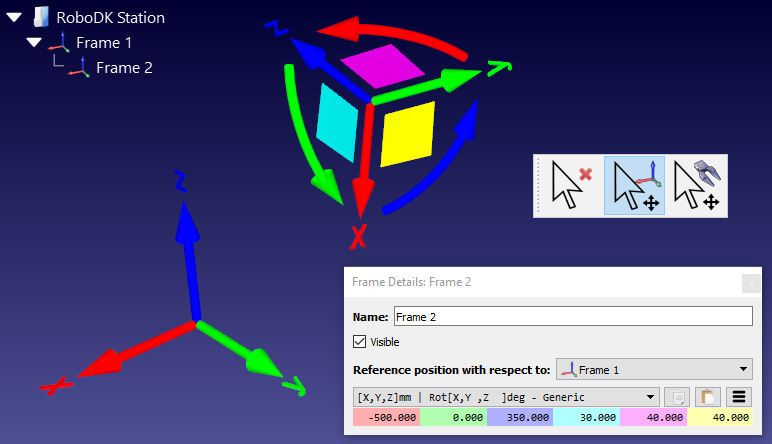
De forma predeterminada, RoboDK muestra la relación como la posición XYZ y los ángulos de Euler en el formato X ➔ Y ➔ Z. Esto significa que la rotación se realiza en el siguiente orden:
1.Primero: una rotación se realiza alrededor del eje X (caso azul claro).
2.Segundo: se realiza una rotación alrededor del eje Y estático (caso rosa).
3.Tercero: se realiza una rotación alrededor del eje Z estático (caso amarillo).
Los controladores Fanuc y Yaskawa / Motoman utilizan el formato descrito anteriormente, sin embargo, otros fabricantes de robots usan el orden de rotación de una manera diferente.
Es posible seleccionar entre diferentes formatos de orientaciones de la lista desplegable de la ventana de detalles del sistema de coordenadas (doble clic en un sistema de coordenadas).
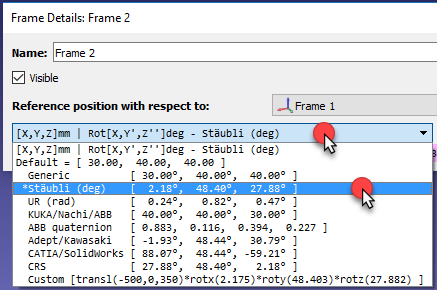
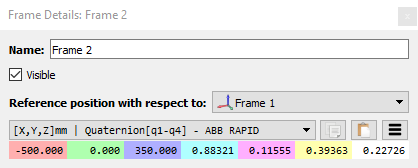
Por ejemplo, los robots Stäubli usan el orden X→Y’→Z’’, mientras que los robots KUKA y Nachi usan Z→Y’→X’’. Por otro lado, los controladores de ABB utilizan los Cuaterniones, que requieren 4 valores para definir la rotación:
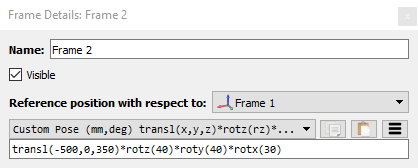
También es posible introducir manualmente un formato personalizado. Por ejemplo, se puede obtener el siguiente comando cuando se selecciona la opción Script (pose personalizada):
Nota Seleccione la orientación de Euler predeterminada en el Menú opciones: Seleccione Herramientas – Opciones – General - Notación Euler por defecto.