Biblioteca de herramientas de corte
La biblioteca de herramientas de corte es una colección de herramientas de corte para máquinas o fresas. Estas herramientas o cortadores son los que se acoplan a la herramienta principal del robot (por ejemplo, el husillo).
Seleccione CAM - Biblioteca de herramientas de corte o el icono correspondiente en la barra de herramientas CAM para mostrar la biblioteca de cortadores.

La ventana de la biblioteca contiene tres pestañas para especificar herramientas, ejes portaherramientas y soportes en forma de tabla.
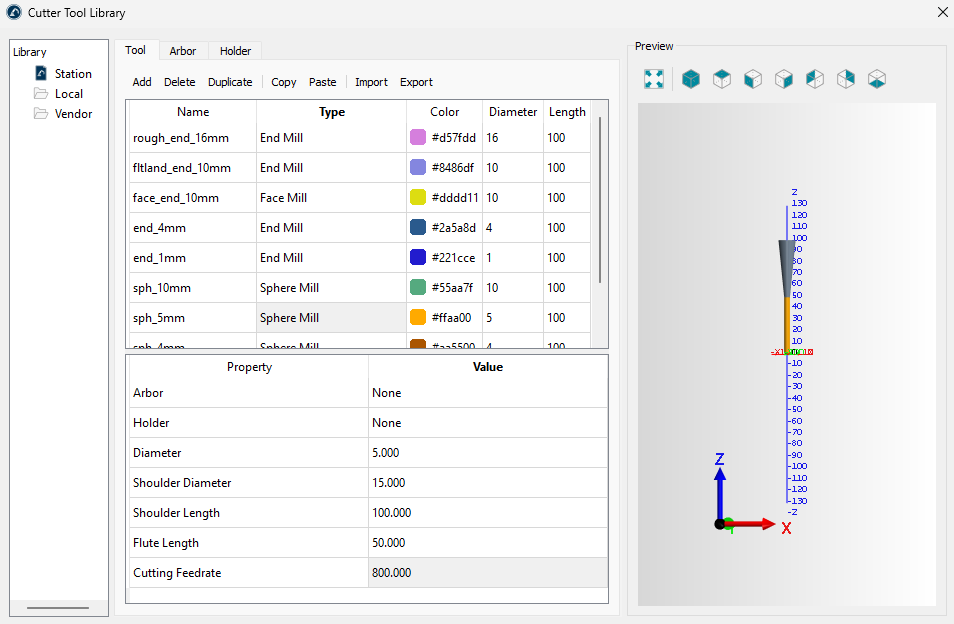
Si su estación RoboDK ya contiene herramientas robóticas (cuchillas), estas se mostrarán en la ventana Biblioteca de herramientas de corte. Si no hay cuchillas en la estación, puede crearlas directamente en la ventana Biblioteca de herramientas de corte utilizando el botón Añadir de la pestaña Herramienta.
En la parte superior de la pestaña Herramienta, es necesario establecer el tipo de herramienta. Aquí también puede cambiar el nombre de la herramienta o establecer el color del filo de corte. Para cambiar los campos correspondientes, haga doble clic.
En la parte inferior de la pestaña Herramienta se editan los parámetros de la herramienta actual. Hay diferentes conjuntos de parámetros disponibles para los distintos tipos de herramientas. Por ejemplo, una fresa de extremo solo tiene tres parámetros principales: diámetro, longitud del hombro, longitud de la ranura y velocidad de corte.
Los ejes portaherramientas y portaherramientas se definen en las pestañas correspondientes de la ventana Biblioteca de herramientas de corte.
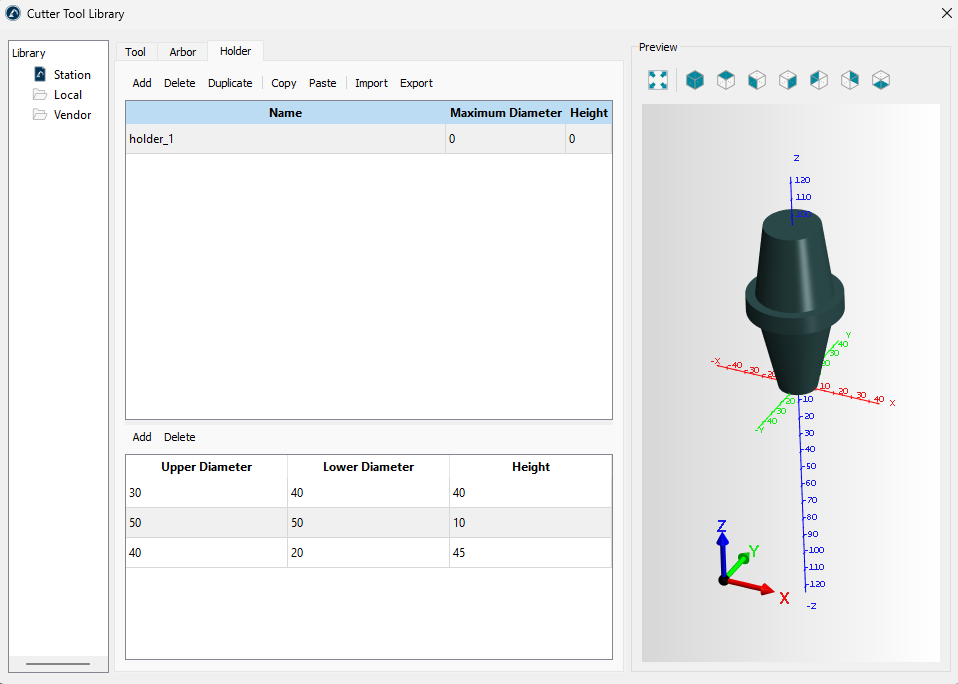
Un eje portaherramientas o soporte se representa convencionalmente mediante un conjunto de conos unidos entre sí. La parte inferior de la pestaña Eje portaherramientas o soporte le permite especificar los parámetros geométricos de los conos que componen un eje portaherramientas o soporte, respectivamente. Varias herramientas pueden utilizar el mismo soporte o eje portaherramientas al mismo tiempo.
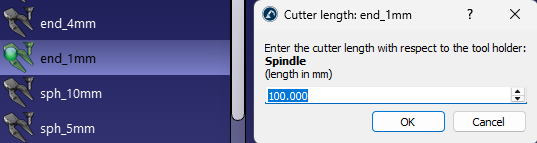
Una herramienta robótica con capacidad de corte también es una fresa en RoboDK. Cuando tiene una fresa, puede ajustar el TCP a lo largo del eje Z del soporte: