Proyecto CAM
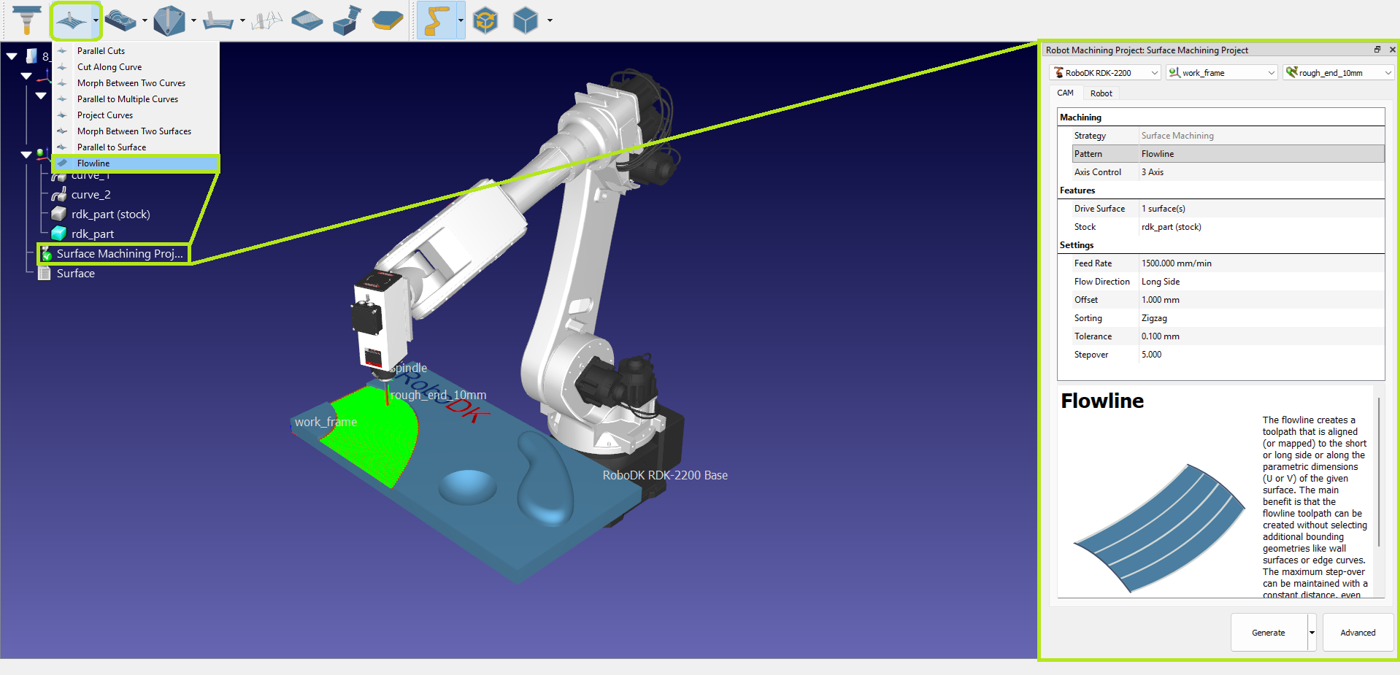
En la barra de herramientas RoboDK CAM, puede seleccionar la estrategia de mecanizado adecuada para su tarea.

Después de seleccionar la estrategia requerida, el proyecto CAM se creará automáticamente.
Configuración CAM
La ventana de configuración del proyecto CAM consta de una sección superior y las pestañas CAM y Robot. El robot, el sistema de referencia y la fresa se seleccionan en la sección superior de la ventana. De forma predeterminada, se seleccionan los elementos activos en el momento de la creación del proyecto CAM.

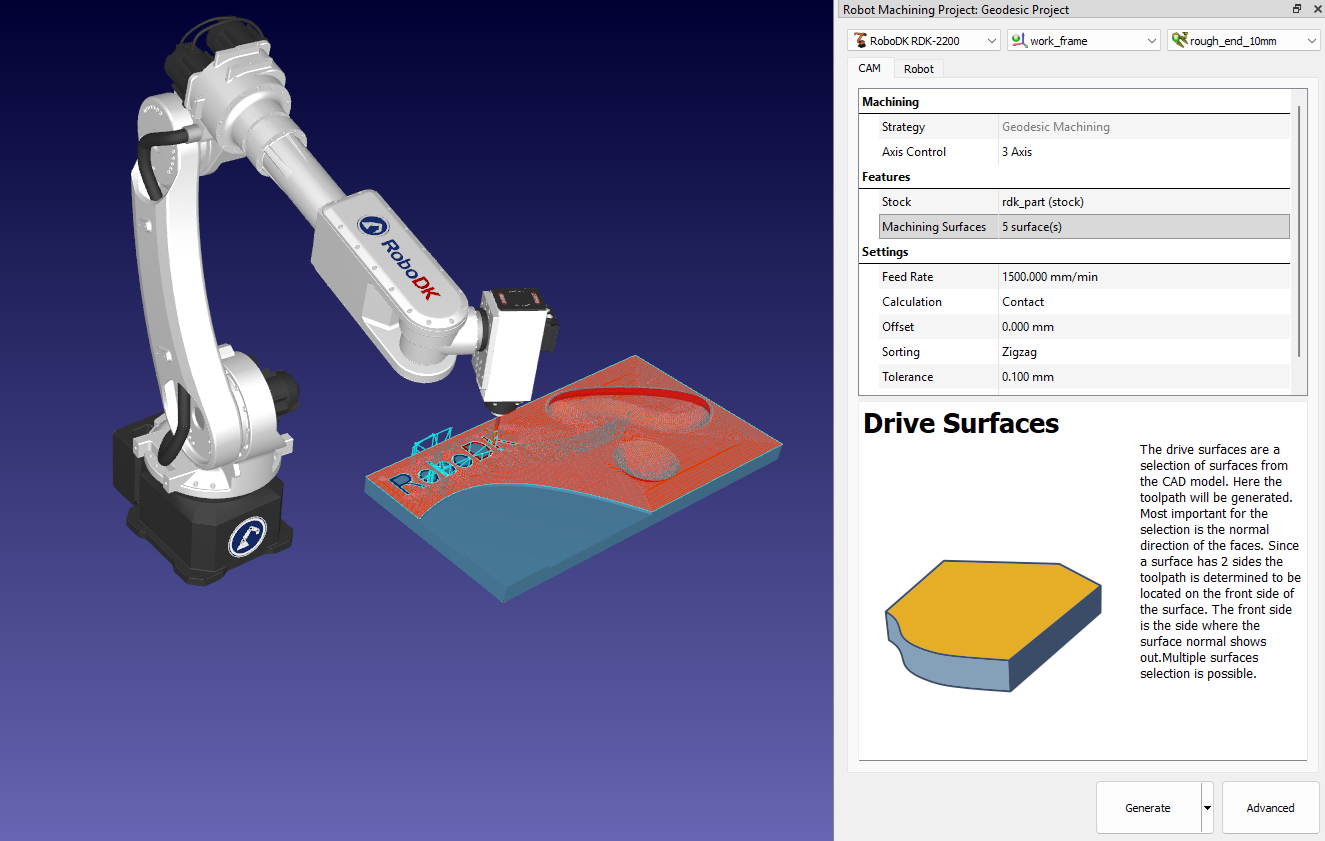
Pestaña CAM
La pestaña CAM del menú del proyecto CAM contiene la configuración de mecanizado y otros ajustes de estrategia descritos en esta sección.
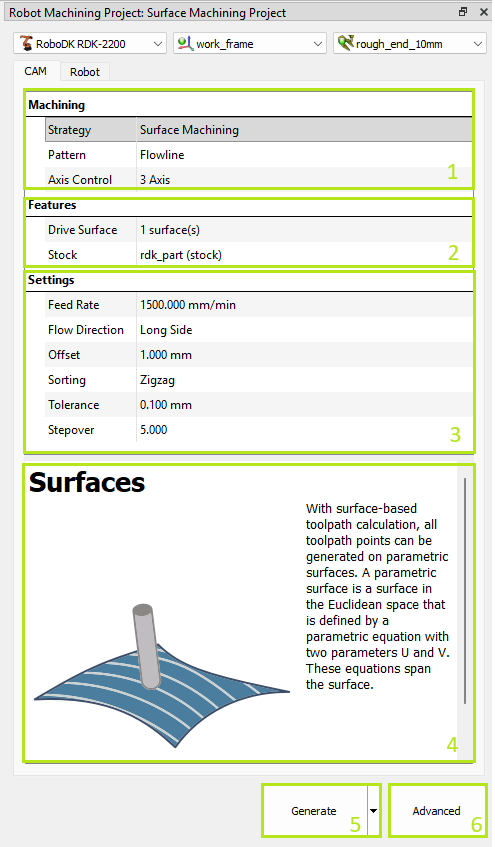
1.Configuración de mecanizado: indica el grupo de estrategias seleccionado y permite cambiar entre patrones. Además, puede seleccionar el modo de control de ejes.
2.Ajustes de características: indica las características seleccionadas de la pieza y el material bruto. Esta selección es obligatoria para calcular las trayectorias de herramienta.
3.Ajustes específicos de la estrategia.
4.Consejo: aparece al hacer clic en los parámetros.
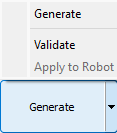
5.Botón de generación de la trayectoria de la herramienta: calcula la trayectoria de la herramienta y la aplica al robot seleccionado. Las subopciones Validar y Aplicar al robot permiten separar las acciones de cálculo y aplicación para trayectorias de herramientas complejas.
6.Configuración avanzada de la estrategia.
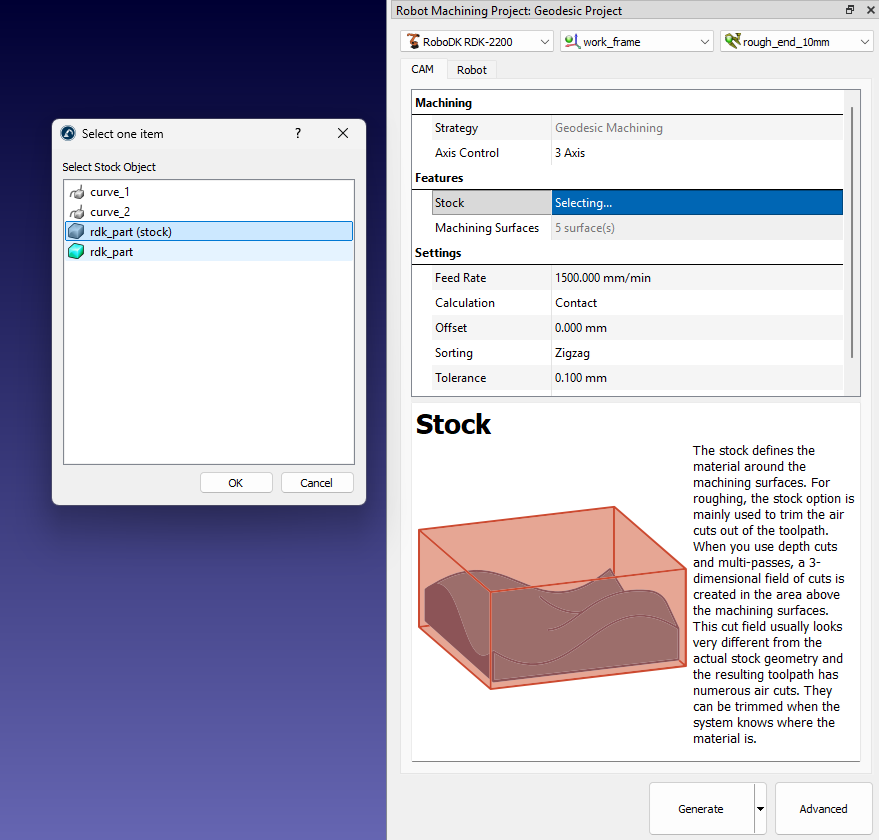
Selección de características
En la sección Características, puede seleccionar las características geométricas necesarias para la estrategia. Dependiendo de la estrategia, deberá seleccionar superficies, curvas o puntos. La herramienta de selección se inicia haciendo doble clic en la línea de configuración de características.
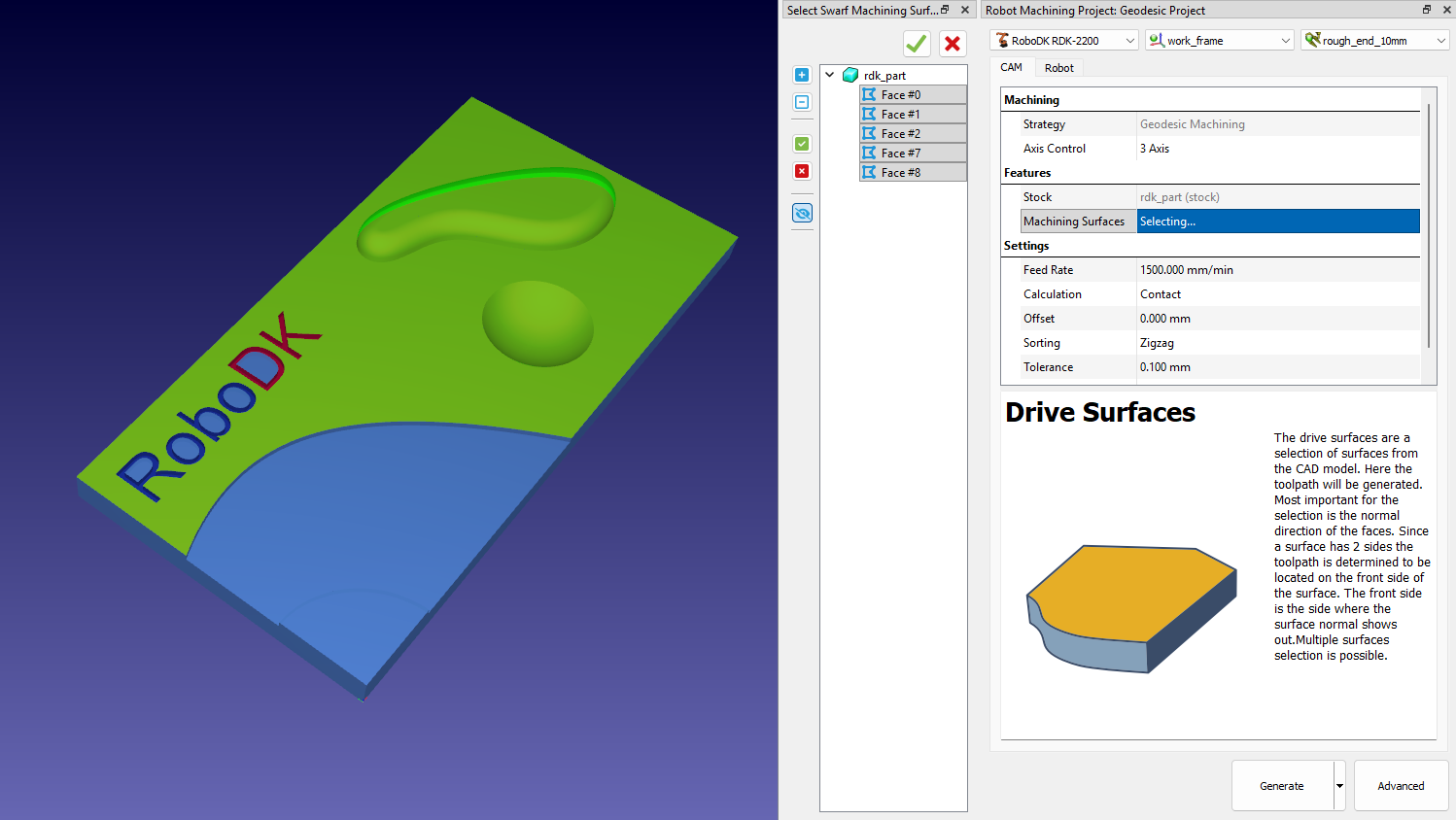

1.Aplicar selección / Cerrar selector
2.Mostrar elementos del árbol
3.Seleccionar todo en árboles expandidos / Borrar selección
4.Mostrar / Ocultar todas las características
5.Vista en árbol de las características
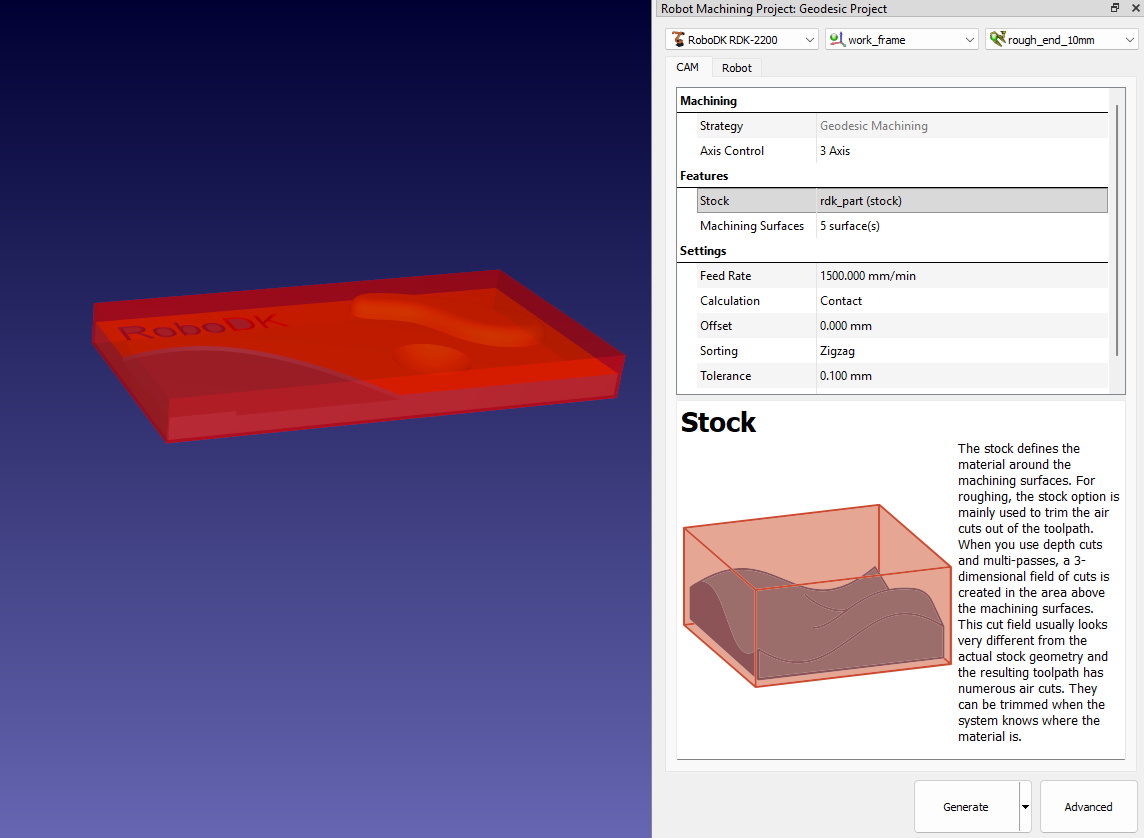
Puede comprobar las características geométricas seleccionadas haciendo clic en la línea del selector.
Además, puede especificar el modelo que se utilizará como material bruto.
Pestaña Robot
La pestaña Robot del menú del proyecto CAM contiene la configuración relacionada con el movimiento del robot.
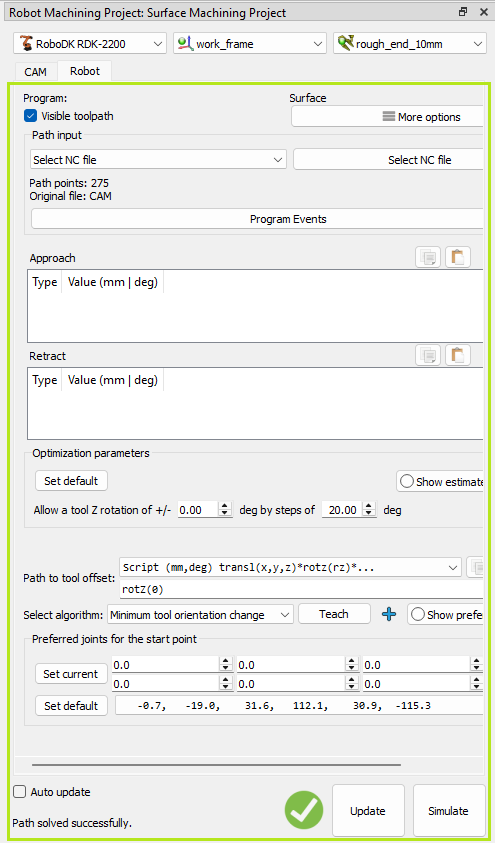
Estos ajustes son los mismos que se pueden encontrar en los ajustes del Proyecto de mecanizado robotizado de RoboDK.