Simulación de remoción de material
La simulación de remoción de material es una visualización dinámica paso a paso del proceso de remoción de material. Proporciona una simulación detallada de cómo una herramienta realiza el corte en una pieza o en el material bruto, lo que le permite observar cada etapa del proceso de mecanizado.
Debe seguir estos pasos para simular correctamente la remoción de material con RoboDK CAM:
1.Se debe definir la fresa.
2.Conecte el robot o el CNC si hay más de un brazo robótico en la estación.
3.Especifique el objeto de material bruto.
4.Habilite la simulación de corte. De lo contrario, la simulación se ejecutará sin remoción de material.
Vincule el robot
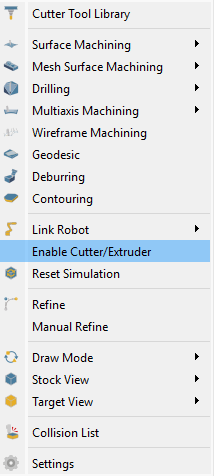
Utilice la flecha hacia abajo del botón Vincular robot para abrir un menú con los robots disponibles y vincule la simulación a uno de ellos. Si el botón está seleccionado (el robot está vinculado), al pulsarlo se desconectará el robot de la simulación.
La vinculación entre el robot y la simulación también se puede realizar mediante el menú contextual del árbol de estaciones.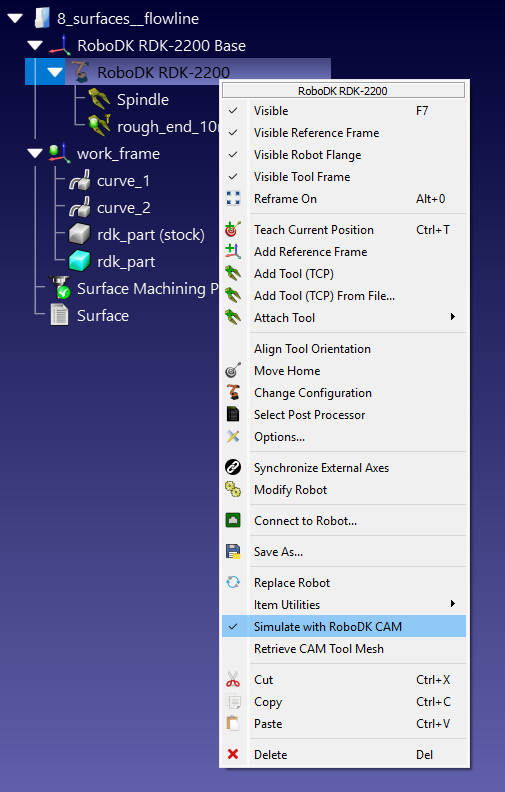
Una vez que el robot está vinculado a la simulación, cualquier movimiento del robot en la ventana RoboDK será repetido por el simulador como movimientos de la herramienta. Independientemente del origen de este movimiento: un programa RoboDK, un script de Python o un movimiento manual con el ratón.
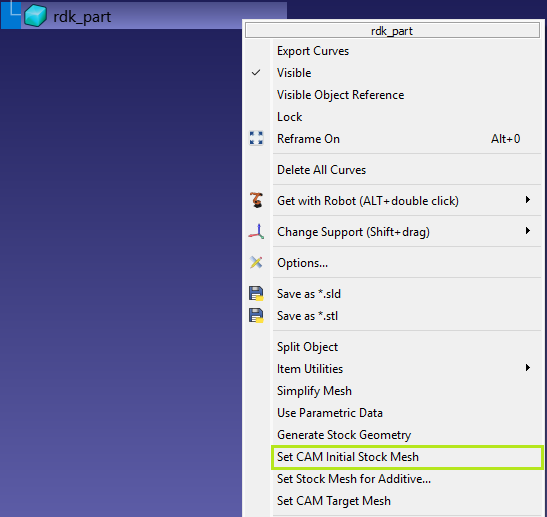
Definición del objeto de material bruto
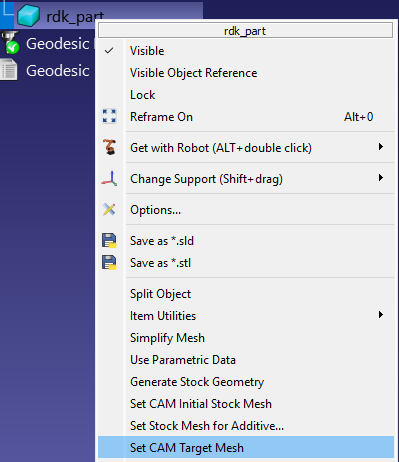
Haga clic con el botón derecho del ratón en el objeto de material bruto en el árbol de estaciones de RoboDK y seleccione Establecer malla de material bruto inicial CAM.
Generación del objeto de material bruto
Haga clic con el botón derecho del ratón en el objeto de material bruto en el árbol de estaciones de RoboDK y seleccione Generar geometría de material bruto.
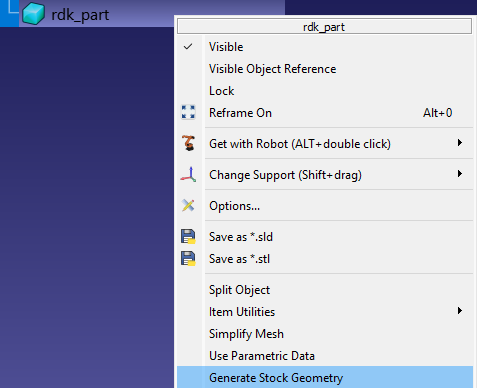
Este comando iniciará la utilidad de creación de material bruto, que utiliza la forma del modelo original para el proceso de generación.
Existen tres métodos para generar material bruto:
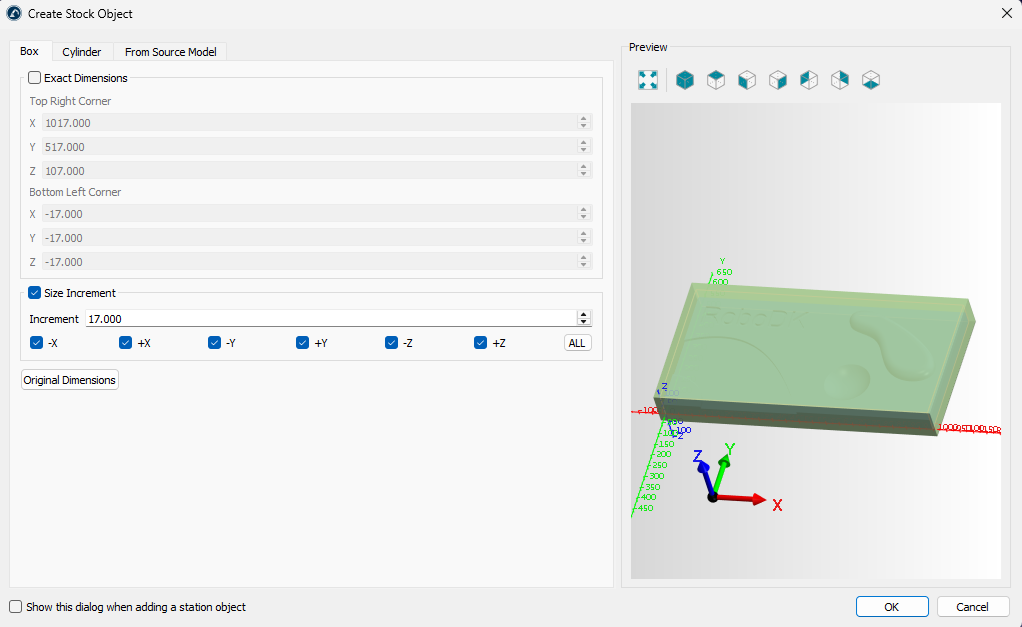
1.Cuadro delimitador: pestaña Caja
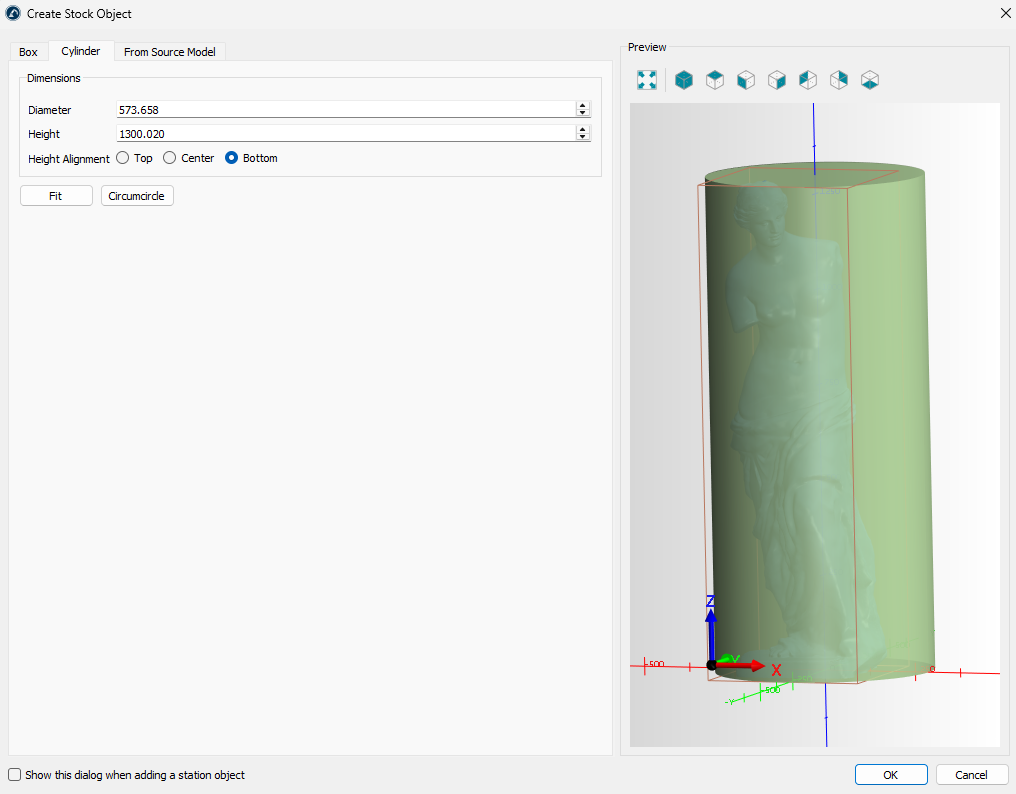
2.Cilindro delimitador: pestaña Cilindro
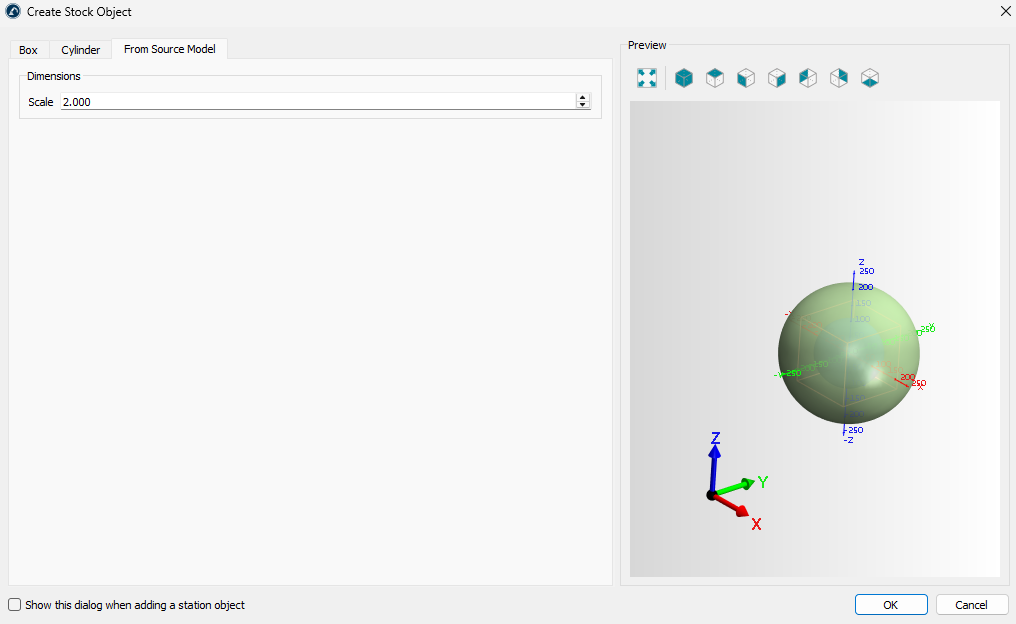
3.Escalado: pestaña Desde modelo de origen
En la pestaña Caja, puede especificar las dimensiones exactas de la caja delimitadora o generarla extrayendo (con el botón Dimensiones originales) y ampliando dimensiones específicas.
La pestaña Cilindro le permite crear un material bruto en forma de cilindro que contiene el modelo original.
La pestaña Desde modelo de origen le permite crear un material bruto en forma de modelo original escalado.
Vista del material bruto
Una vez completada la definición del material bruto, el modelo de simulación de material bruto se mostrará encima de los demás modelos en la escena de RoboDK. Puede controlar la vista de la simulación de material bruto utilizando el submenú Vista del material bruto de la barra de herramientas:
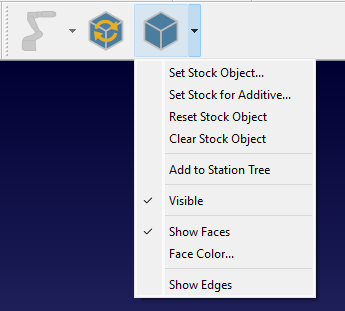
Establecer objeto de stock: define/redefine un objeto de stock.
Establecer material bruto para objeto aditivo: definir/redefinir un objeto de material bruto aditivo.
Restablecer objeto de stock: devuelve el stock a su estado inicial.
Borrar objeto de stock: elimina un objeto de stock.
Añadir al árbol de estaciones: copiar el material bruto en su estado actual como modelo en el árbol de estaciones de RoboDK.
Visible: interruptor de visibilidad del material bruto.
Mostrar caras: muestra las caras del material bruto.
Color de cara...: establezca el color predeterminado para las caras.
Mostrar bordes: muestra los bordes del material bruto.
Activar simulación de remoción de material
La simulación de remoción de material se activa automáticamente. Sin embargo, puede controlarla manualmente mediante el comando CAM-Habilitar cortador/extrusor.
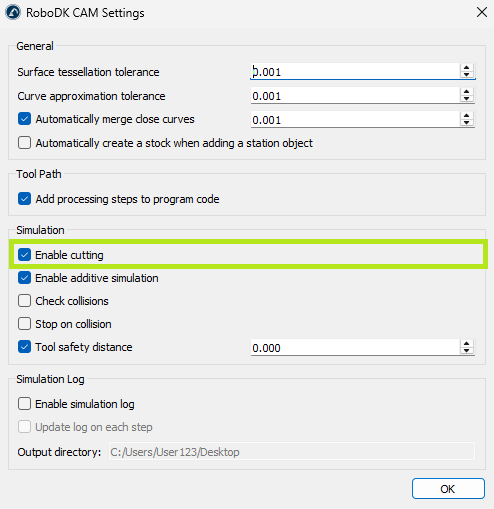
Además, es necesario comprobar si la configuración CAM-Configuración-Simulación-Habilitar corte está activa.
Restablecer simulación
El comando de restablecimiento de la simulación devuelve el material bruto a su estado inicial.

Vista de objetivo
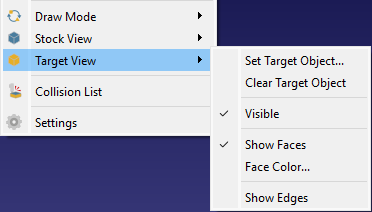
Puede comparar el estado actual del material bruto con el modelo objetivo. Para ello, primero debe establecer el modelo objetivo mediante CAM-Vista objetivo-Establecer objeto objetivo y, a continuación, aplicar CAM-Modo de dibujo-Mapa de desviación.
Para establecer el objeto objetivo, también puede hacer clic con el botón derecho del ratón en el modelo en el árbol de estaciones y seleccionar el comando Establecer malla objetivo CAM.
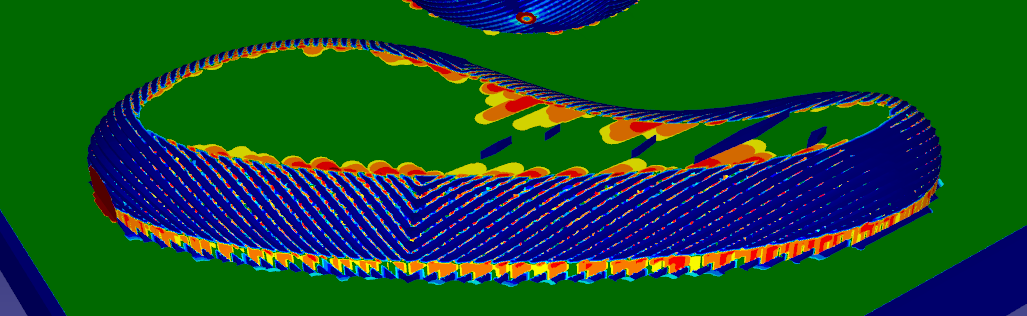
Mapa de desviación
El mapa de desviación muestra la diferencia relativa utilizando una escala de colores que va del verde, que indica que no hay diferencia, al rojo, que indica la mayor diferencia.
Seleccione CAM-Dibujo Mode-Deviation Map para mostrar el mapa de desviación.
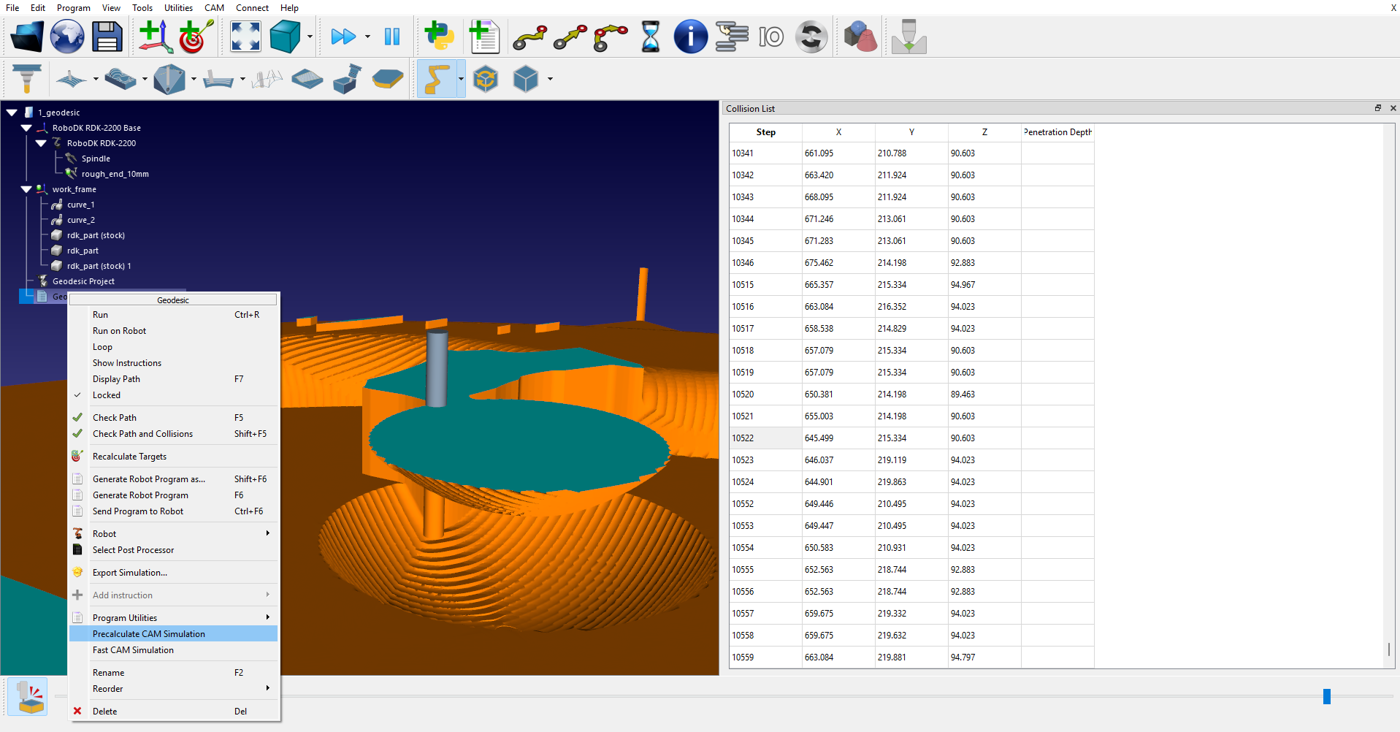
Lista de colisiones
La lista de colisiones muestra la secuencia de colisiones entre las partes no cortantes de la herramienta de corte (por ejemplo, el soporte) y la pieza de trabajo durante el mecanizado.
Seleccione CAM-Lista de colisiones para mostrar la lista de colisiones.
Refinar/Refinar manualmente
Con la opción Refinar activada, puede obtener una visualización de la superficie de mayor calidad durante la simulación (esto puede afectar al rendimiento del renderizado).
Con el comando Refinar manualmente, puede mejorar la visualización de las superficies una vez después de pulsarlo.
Seleccione CAM-Refinar / CAM-Refinar manualmente para realizar la operación de refinado.
Simulación CAM rápida
Puede ejecutar una simulación rápida de la remoción de material. Para ello, haga clic con el botón derecho del ratón en el programa objetivo y seleccione el comando Simulación CAM rápida.