Vincule el robot
Utilice la flecha hacia abajo del botón Vincular robot para abrir un menú con los robots disponibles y vincule la simulación a uno de ellos. Si el botón está seleccionado (el robot está vinculado), al pulsarlo se desconectará el robot de la simulación.
La vinculación entre el robot y la simulación también se puede realizar mediante el menú contextual del árbol de estaciones.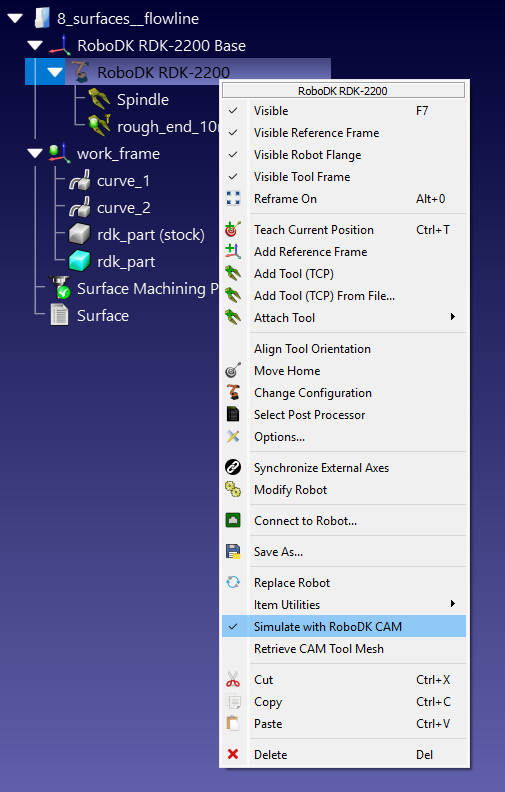
Una vez que el robot está vinculado a la simulación, cualquier movimiento del robot en la ventana RoboDK será repetido por el simulador como movimientos de la herramienta. Independientemente del origen de este movimiento: un programa RoboDK, un script de Python o un movimiento manual con el ratón.
Nota: el comando de vinculación del robot también está disponible en el menú CAM-Link Robot.