RoboDK CAM
Introducción
RoboDK CAM añade funciones de software CAM al software RoboDK. RoboDK CAM es compatible con diferentes procesos de fabricación para robots, CNC y mecanismos personalizados en RoboDK. Estos procesos de fabricación incluyen fresado, torneado, corte, fabricación aditiva y mucho más. RoboDK CAM también le permite simular la remoción de material.
Los controles principales de RoboDK CAM se encuentran en la barra de herramientas que aparece después de instalar el Addin:
Tutorial de inicio rápido
Esta guía de inicio rápido proporciona una descripción general de las funciones de RoboDK CAM y le ayudará a familiarizarse con RoboDK CAM para el mecanizado.
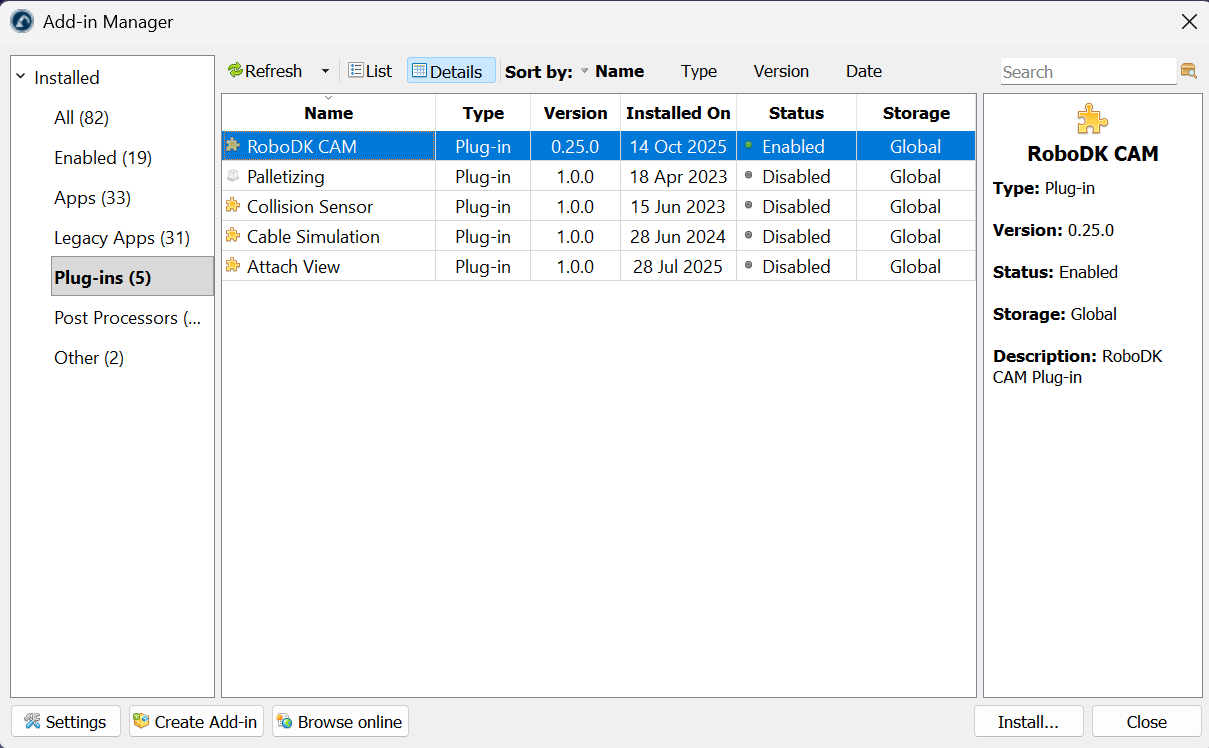
Instalar RoboDK CAM
Puede instalar RoboDK CAM como Addin abriendo el archivo del paquete RDKP de RoboDK CAM con RoboDK. Asegúrese de utilizar la última versión de RoboDK.
RoboDK CAM solo es compatible con Windows.
Biblioteca de herramientas de corte
La biblioteca de herramientas de corte es una colección de herramientas de corte para máquinas o fresas. Estas herramientas o cortadores son los que se acoplan a la herramienta principal del robot (por ejemplo, el husillo).
Seleccione CAM - Biblioteca de herramientas de corte o el icono correspondiente en la barra de herramientas CAM para mostrar la biblioteca de cortadores.

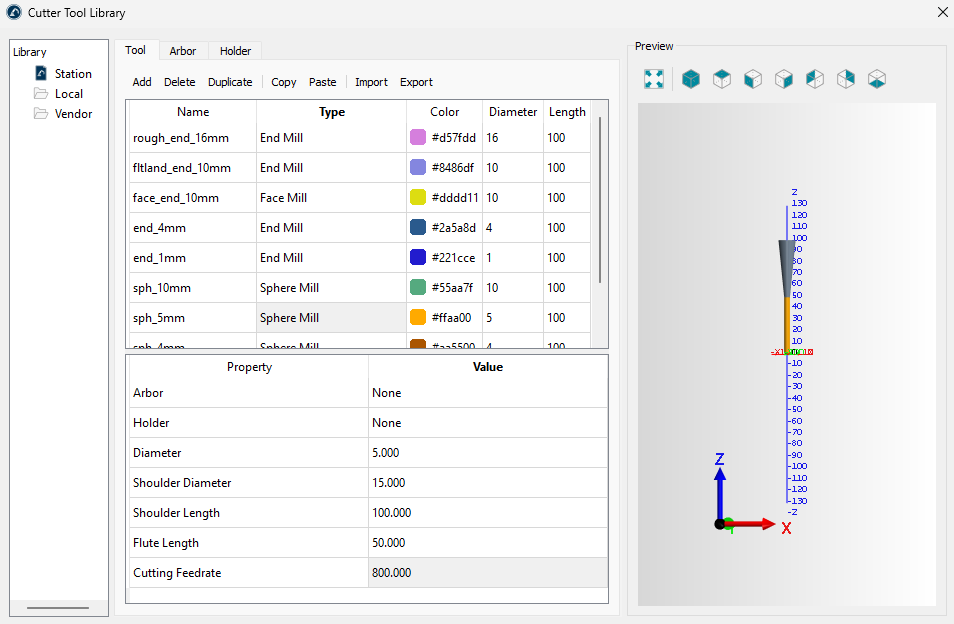
La ventana de la biblioteca contiene tres pestañas para especificar herramientas, ejes portaherramientas y soportes en forma de tabla.
Si su estación RoboDK ya contiene herramientas robóticas (cuchillas), estas se mostrarán en la ventana Biblioteca de herramientas de corte. Si no hay cuchillas en la estación, puede crearlas directamente en la ventana Biblioteca de herramientas de corte utilizando el botón Añadir de la pestaña Herramienta.
En la parte superior de la pestaña Herramienta, es necesario establecer el tipo de herramienta. Aquí también puede cambiar el nombre de la herramienta o establecer el color del filo de corte. Para cambiar los campos correspondientes, haga doble clic.
En la parte inferior de la pestaña Herramienta se editan los parámetros de la herramienta actual. Hay diferentes conjuntos de parámetros disponibles para los distintos tipos de herramientas. Por ejemplo, una fresa de extremo solo tiene tres parámetros principales: diámetro, longitud del hombro, longitud de la ranura y velocidad de corte.
Los ejes portaherramientas y portaherramientas se definen en las pestañas correspondientes de la ventana Biblioteca de herramientas de corte.
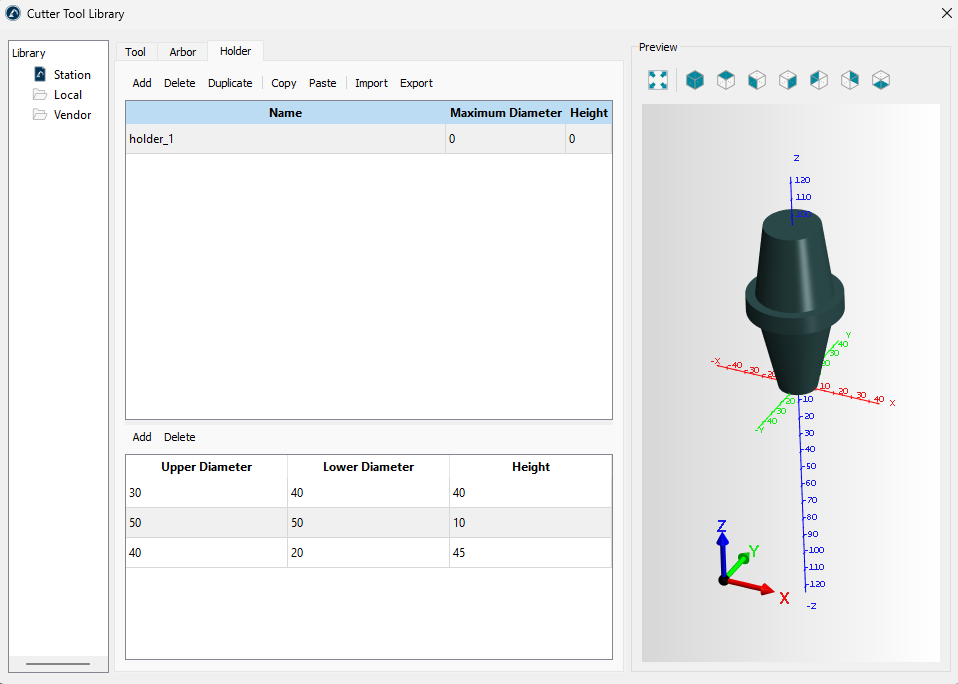
Un eje portaherramientas o soporte se representa convencionalmente mediante un conjunto de conos unidos entre sí. La parte inferior de la pestaña Eje portaherramientas o soporte le permite especificar los parámetros geométricos de los conos que componen un eje portaherramientas o soporte, respectivamente. Varias herramientas pueden utilizar el mismo soporte o eje portaherramientas al mismo tiempo.
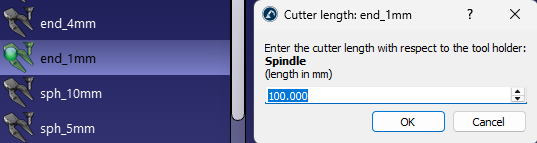
Una herramienta robótica con capacidad de corte también es una fresa en RoboDK. Cuando tiene una fresa, puede ajustar el TCP a lo largo del eje Z del soporte:
Proyecto CAM
En la barra de herramientas RoboDK CAM, puede seleccionar la estrategia de mecanizado adecuada para su tarea.

Después de seleccionar la estrategia requerida, el proyecto CAM se creará automáticamente.
Configuración CAM
La ventana de configuración del proyecto CAM consta de una sección superior y las pestañas CAM y Robot. El robot, el sistema de referencia y la fresa se seleccionan en la sección superior de la ventana. De forma predeterminada, se seleccionan los elementos activos en el momento de la creación del proyecto CAM.

Pestaña CAM
La pestaña CAM del menú del proyecto CAM contiene la configuración de mecanizado y otros ajustes de estrategia descritos en esta sección.
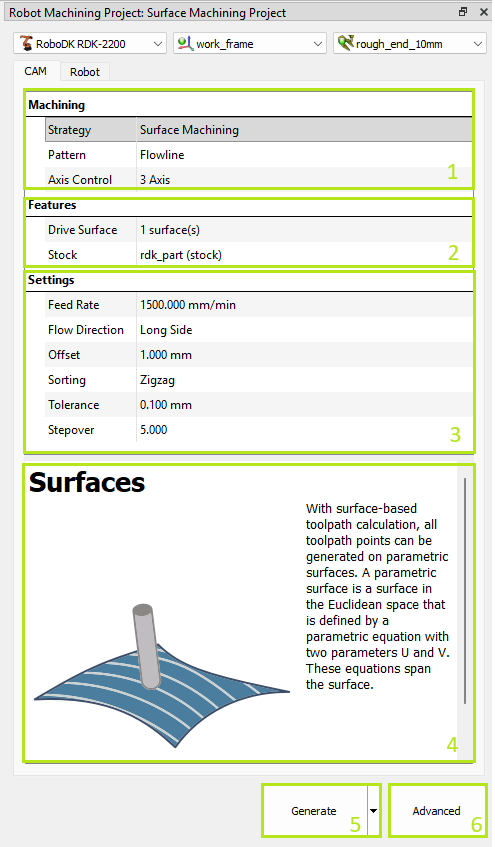
1.Configuración de mecanizado: indica el grupo de estrategias seleccionado y permite cambiar entre patrones. Además, puede seleccionar el modo de control de ejes.
2.Ajustes de características: indica las características seleccionadas de la pieza y el material bruto. Esta selección es obligatoria para calcular las trayectorias de herramienta.
3.Ajustes específicos de la estrategia.
4.Consejo: aparece al hacer clic en los parámetros.
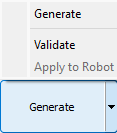
5.Botón de generación de la trayectoria de la herramienta: calcula la trayectoria de la herramienta y la aplica al robot seleccionado. Las subopciones Validar y Aplicar al robot permiten separar las acciones de cálculo y aplicación para trayectorias de herramientas complejas.
6.Configuración avanzada de la estrategia.
Selección de características
En la sección Características, puede seleccionar las características geométricas necesarias para la estrategia. Dependiendo de la estrategia, deberá seleccionar superficies, curvas o puntos. La herramienta de selección se inicia haciendo doble clic en la línea de configuración de características.
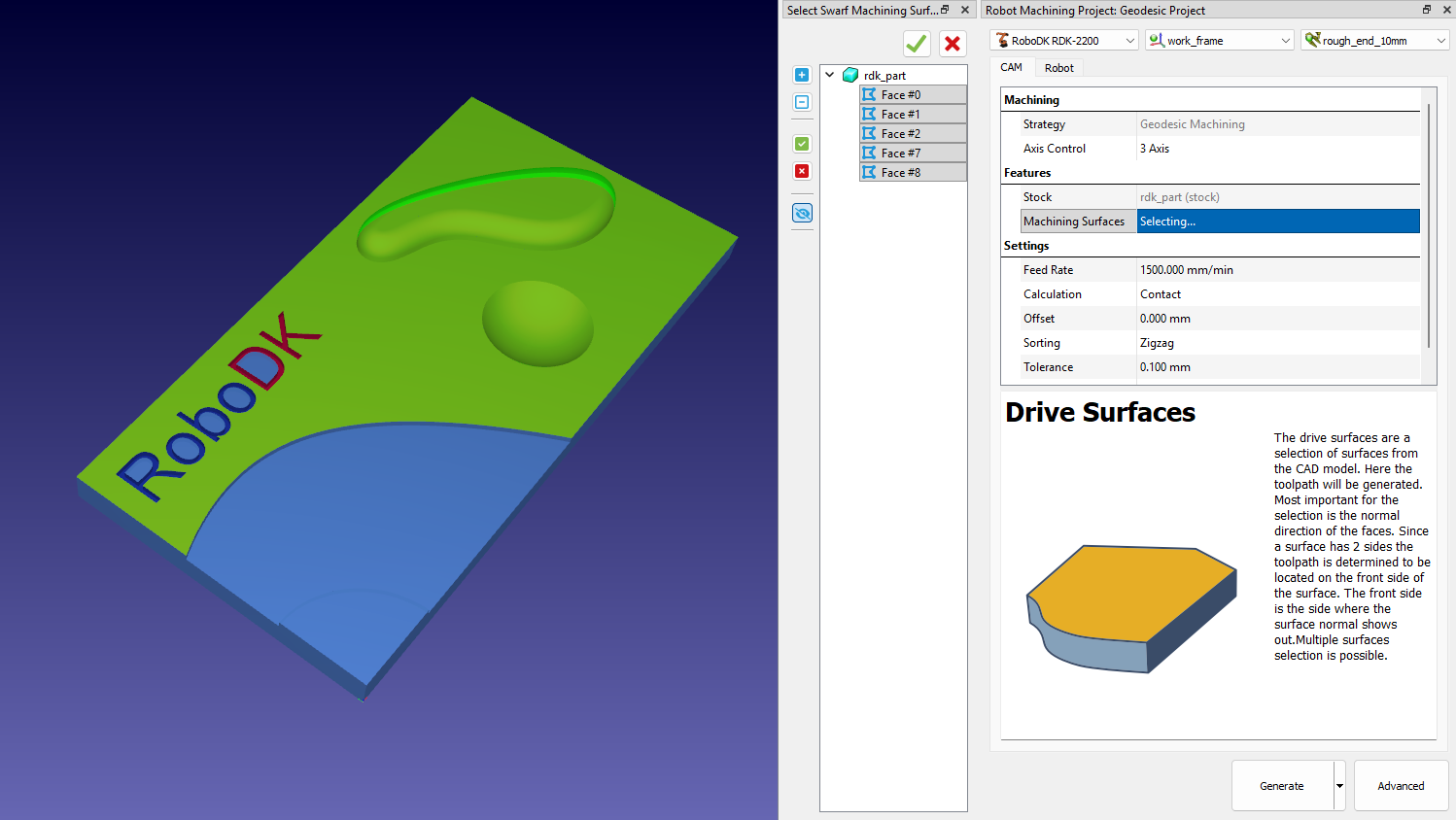

1.Aplicar selección / Cerrar selector
2.Mostrar elementos del árbol
3.Seleccionar todo en árboles expandidos / Borrar selección
4.Mostrar / Ocultar todas las características
5.Vista en árbol de las características
Puede comprobar las características geométricas seleccionadas haciendo clic en la línea del selector.
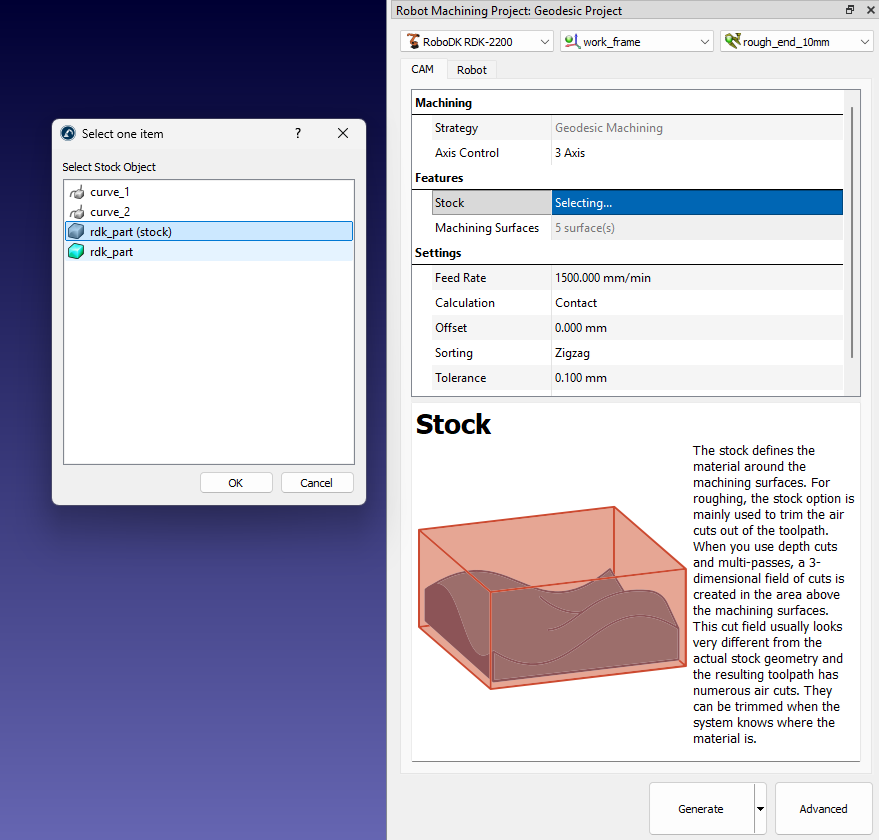
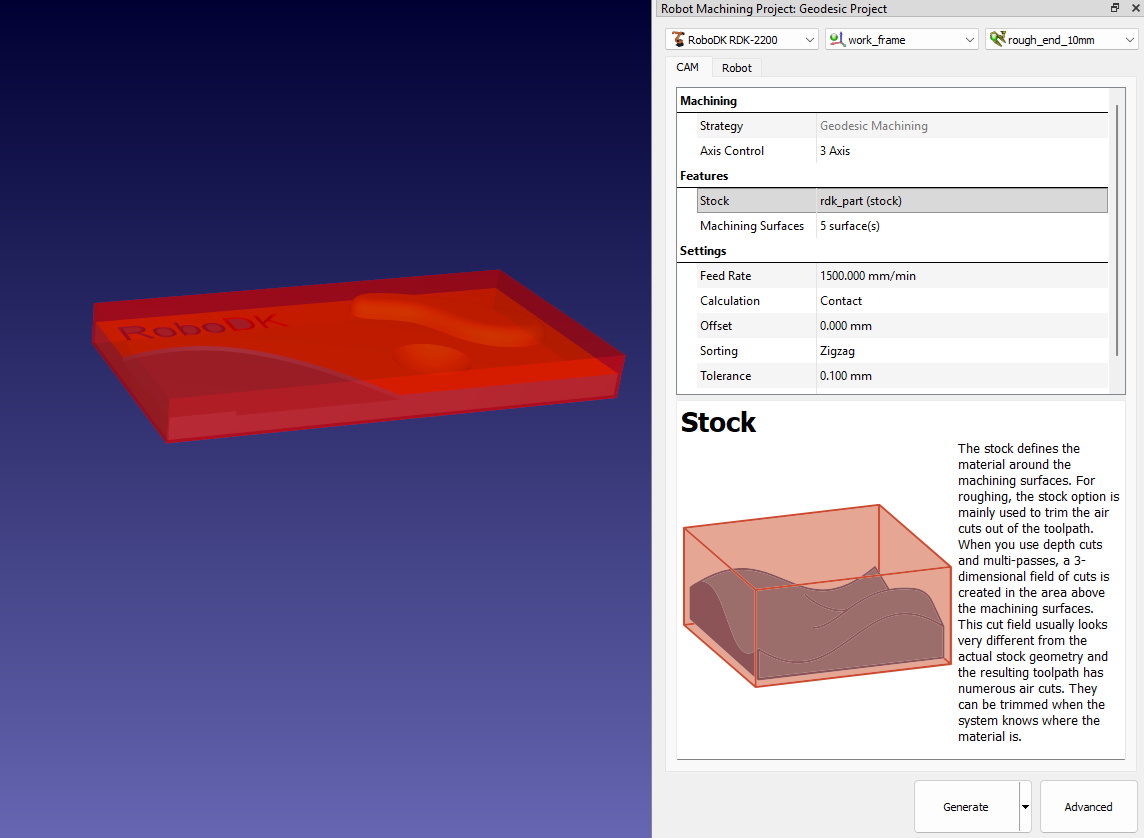
Además, puede especificar el modelo que se utilizará como material bruto.
Pestaña Robot
La pestaña Robot del menú del proyecto CAM contiene la configuración relacionada con el movimiento del robot.
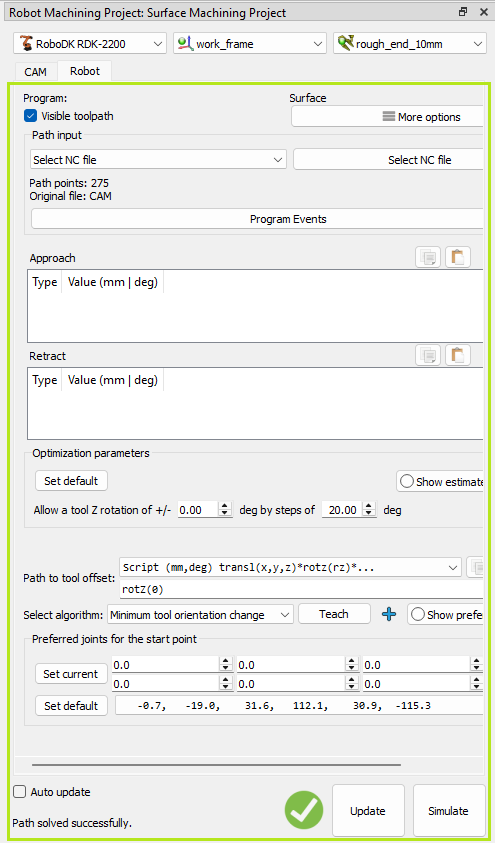
Estos ajustes son los mismos que se pueden encontrar en los ajustes del Proyecto de mecanizado robotizado de RoboDK.
Estrategias de trayectorias de herramienta
RoboDK CAM le permite utilizar estrategias de mecanizado como el mecanizado de superficies, taladrado, desbaste y otras. Además, puede simular el proceso de remoción de material.

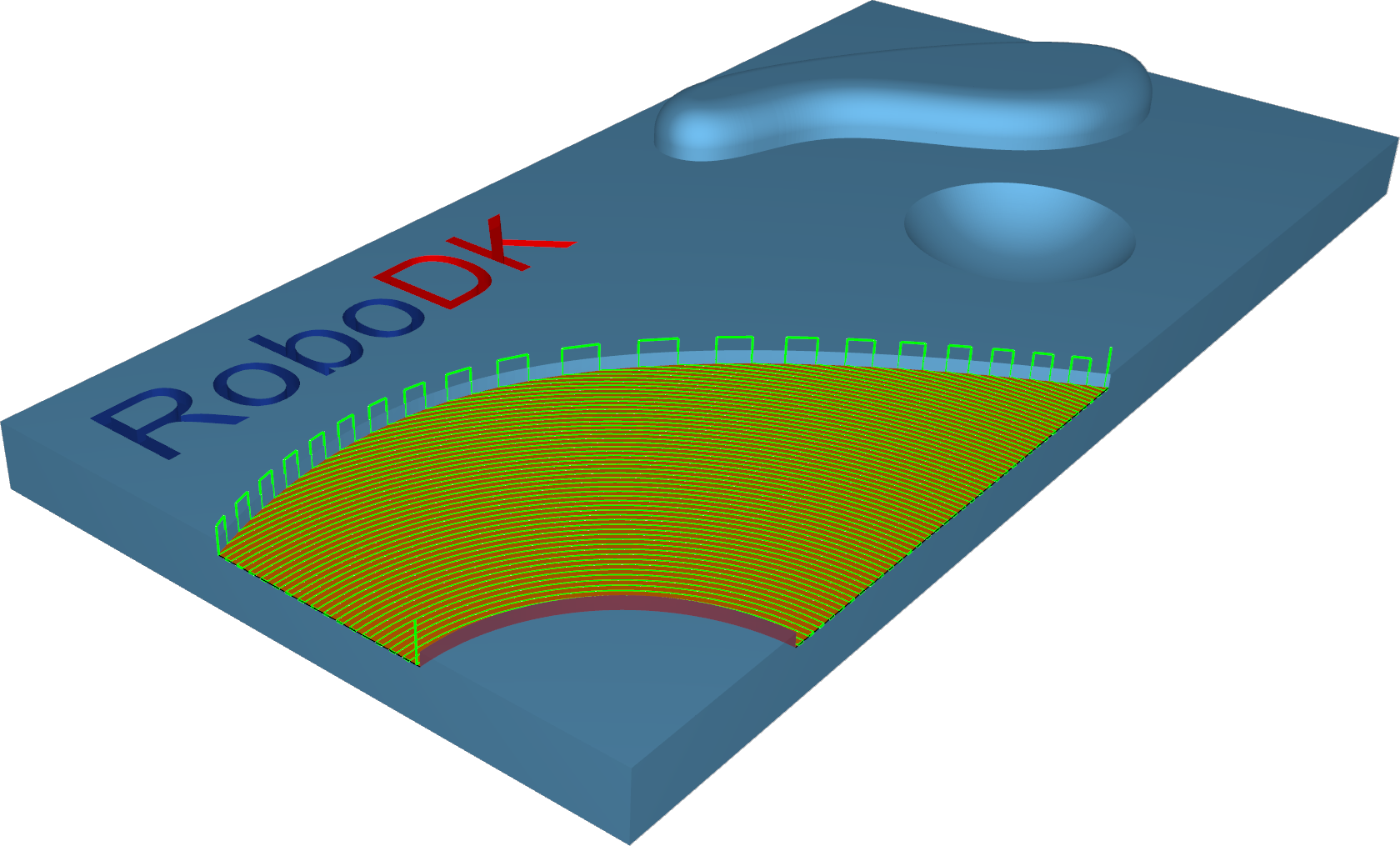
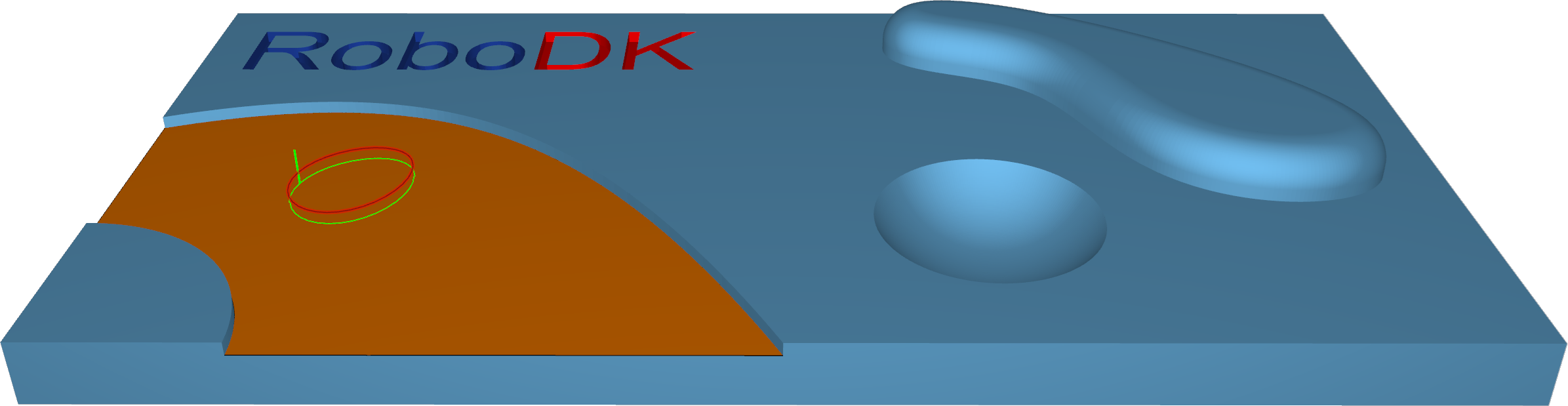
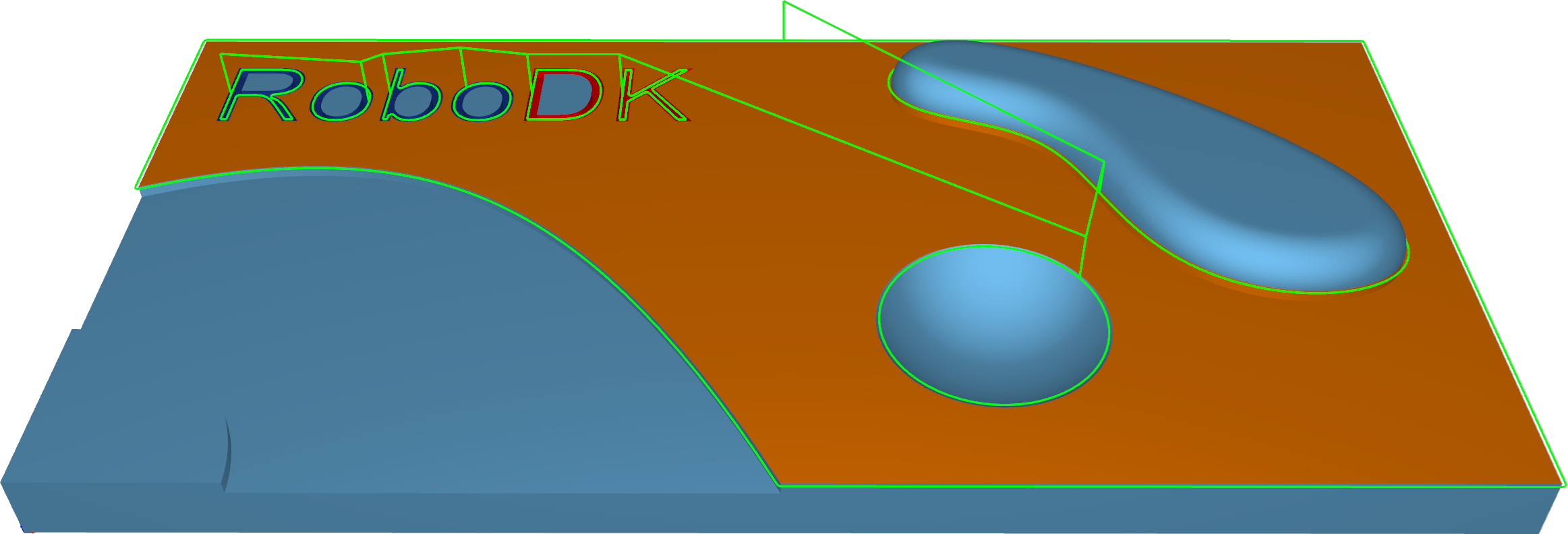
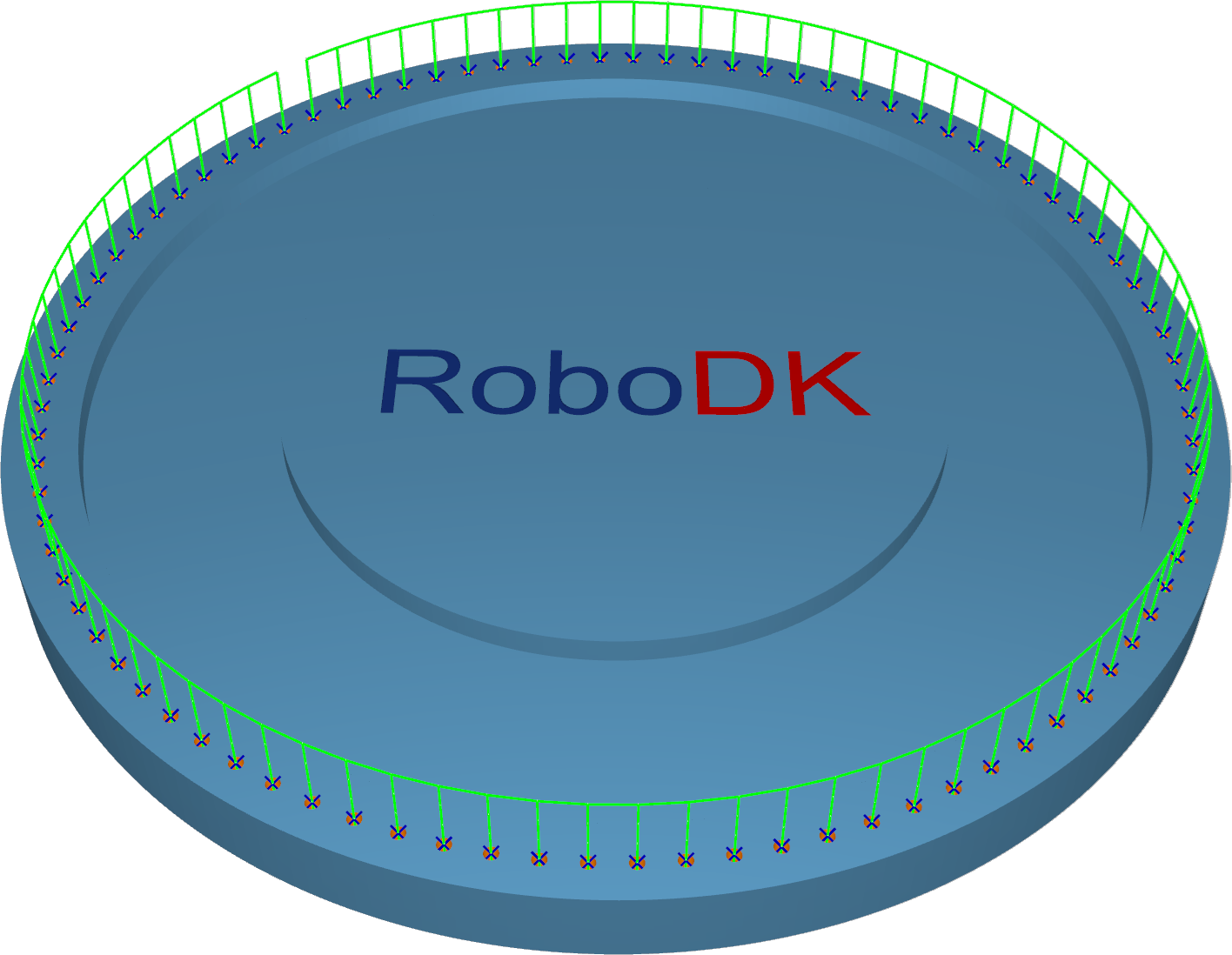
Superficies: cortes paralelos
La opción Cortes paralelos crea un patrón de trayectoria de herramienta con cortes paralelos. La orientación de los cortes se define mediante dos ángulos: X-Y (que realiza la rotación de los cortes alrededor del eje Z) y Z. Imagine que corta una manzana: puede cortarla con un cuchillo en paralelo de arriba abajo o de izquierda a derecha. Las imágenes del cuadro de diálogo simbolizan cómo establecer la dirección de corte deseada utilizando los ángulos.
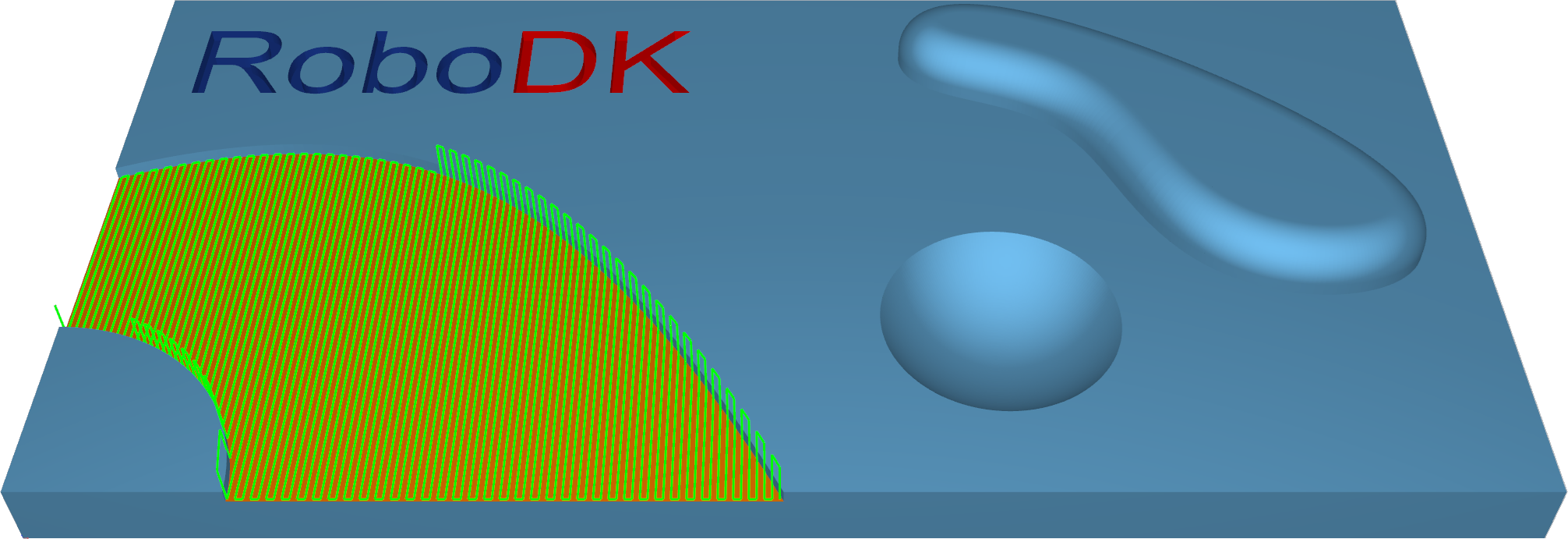
Estación: CAM-Superficies-CortesParalelos.
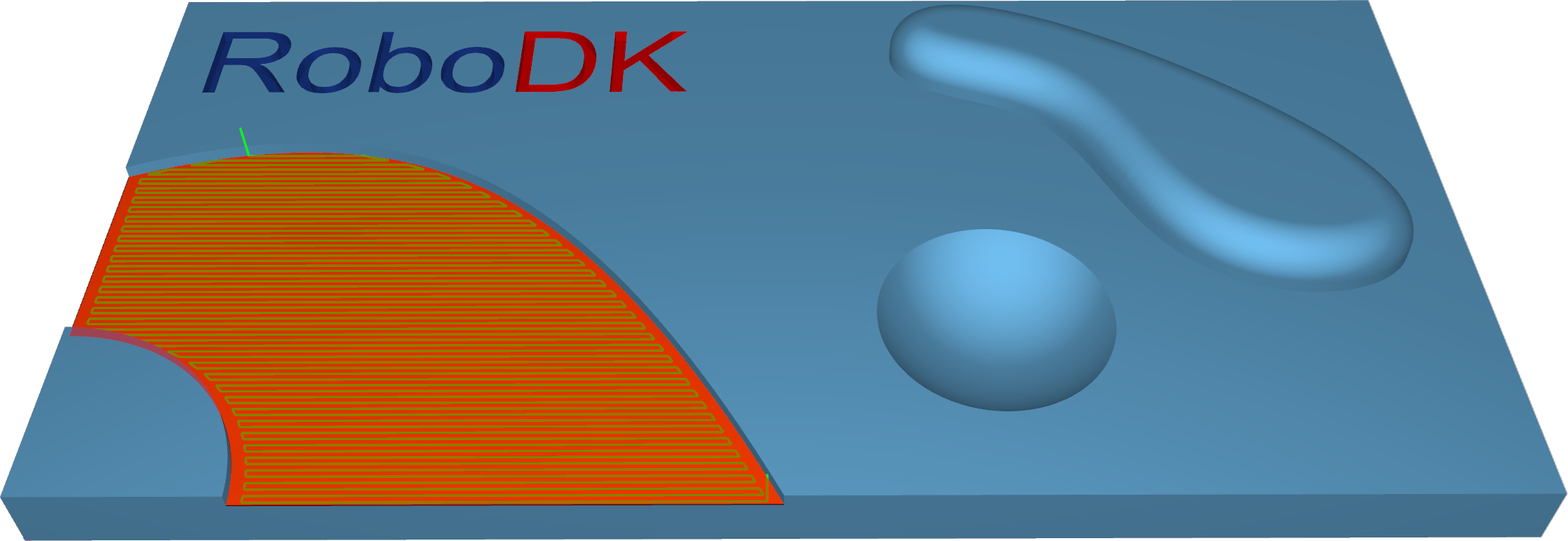
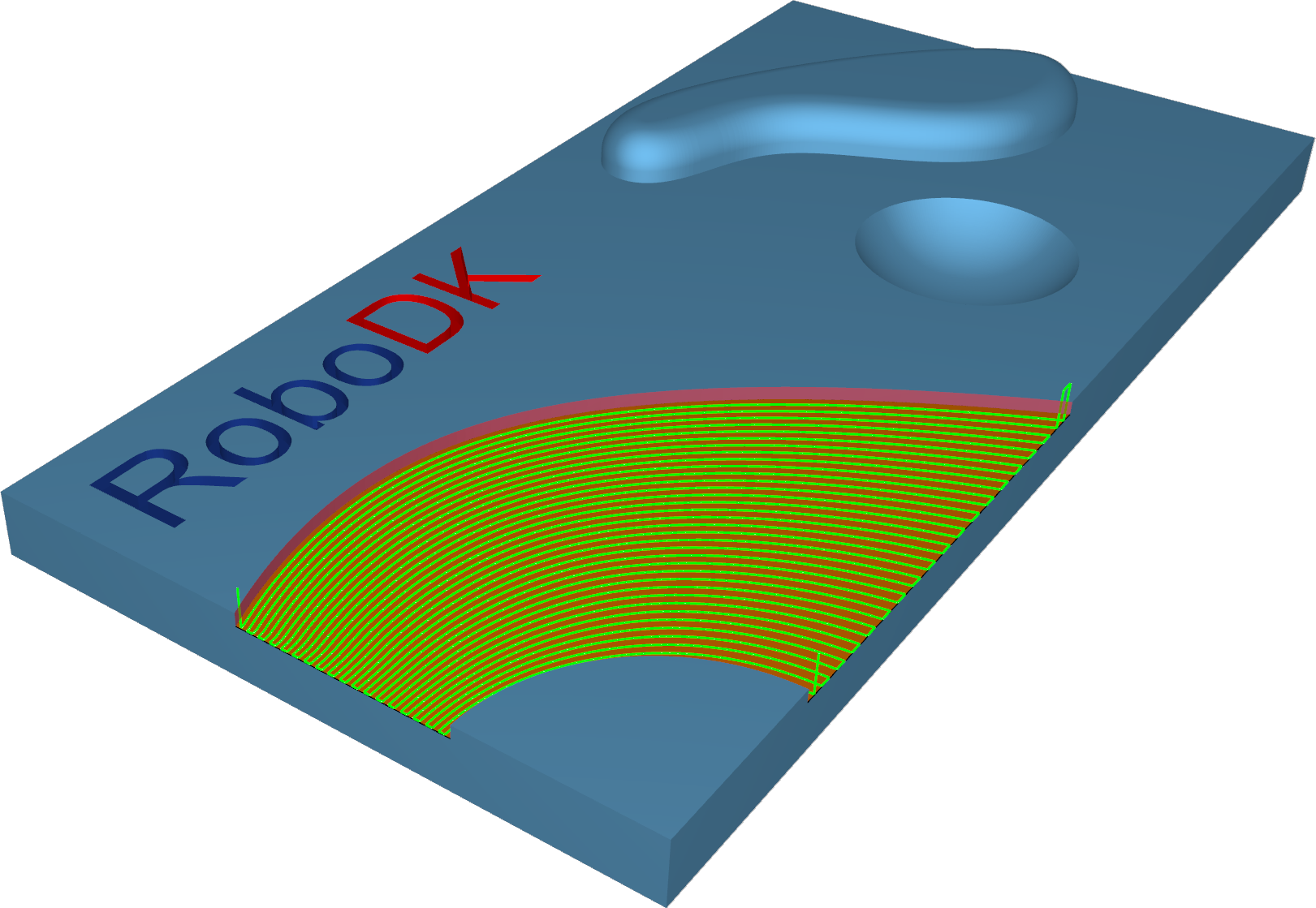
Superficies: cortes a lo largo de una curva
El patrón Cortes a lo largo de una curva permite al usuario crear una trayectoria de herramienta ortogonal a una curva de desplazamiento. Esto significa que si la curva seleccionada como «Lead» no es una línea recta, los cortes no serán paralelos entre sí.
Estación: CAM-Superficies-Corte a lo largo de la curva.
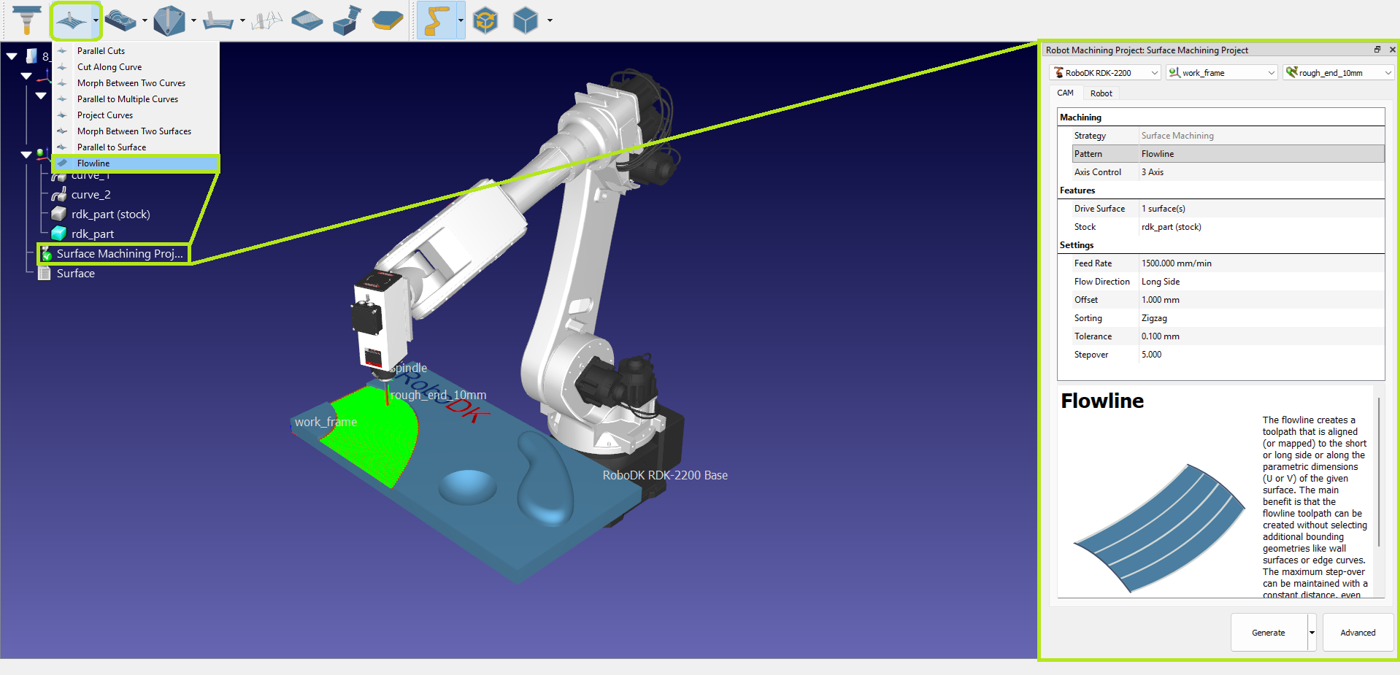
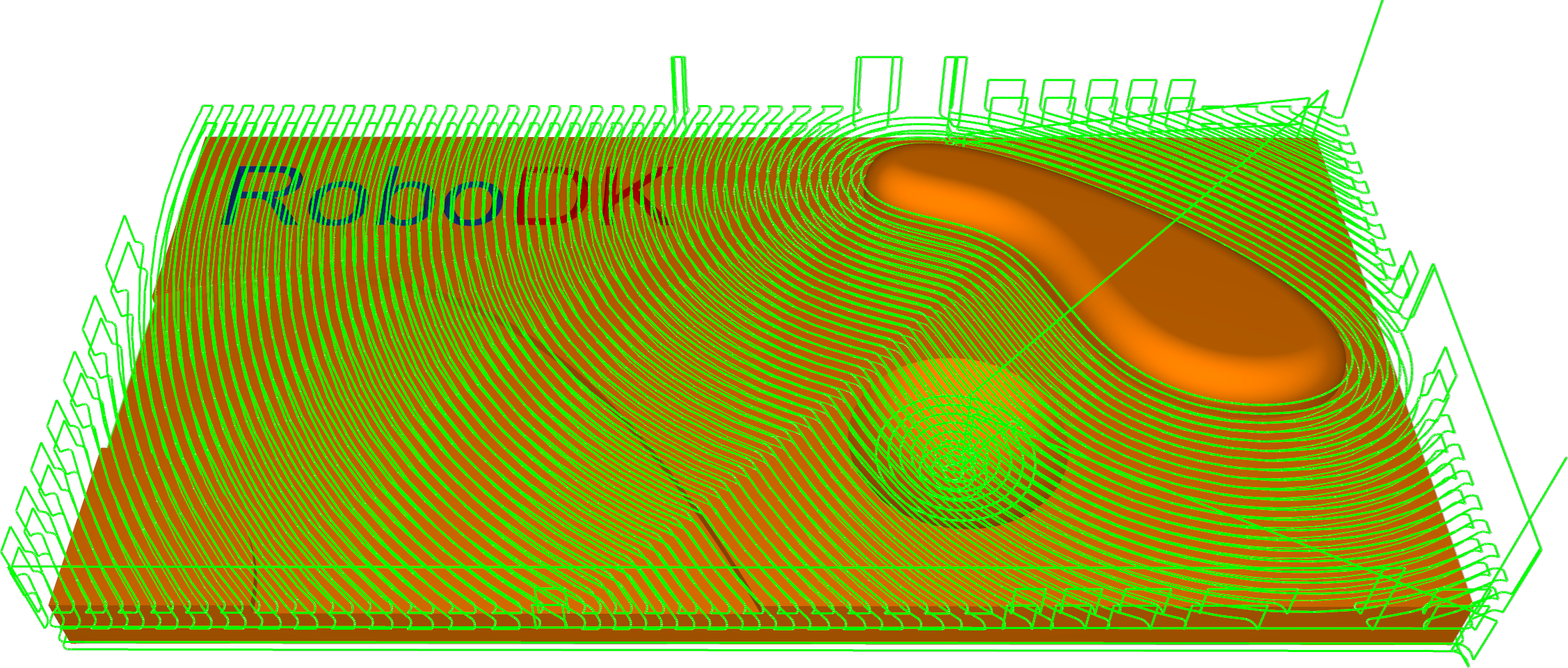
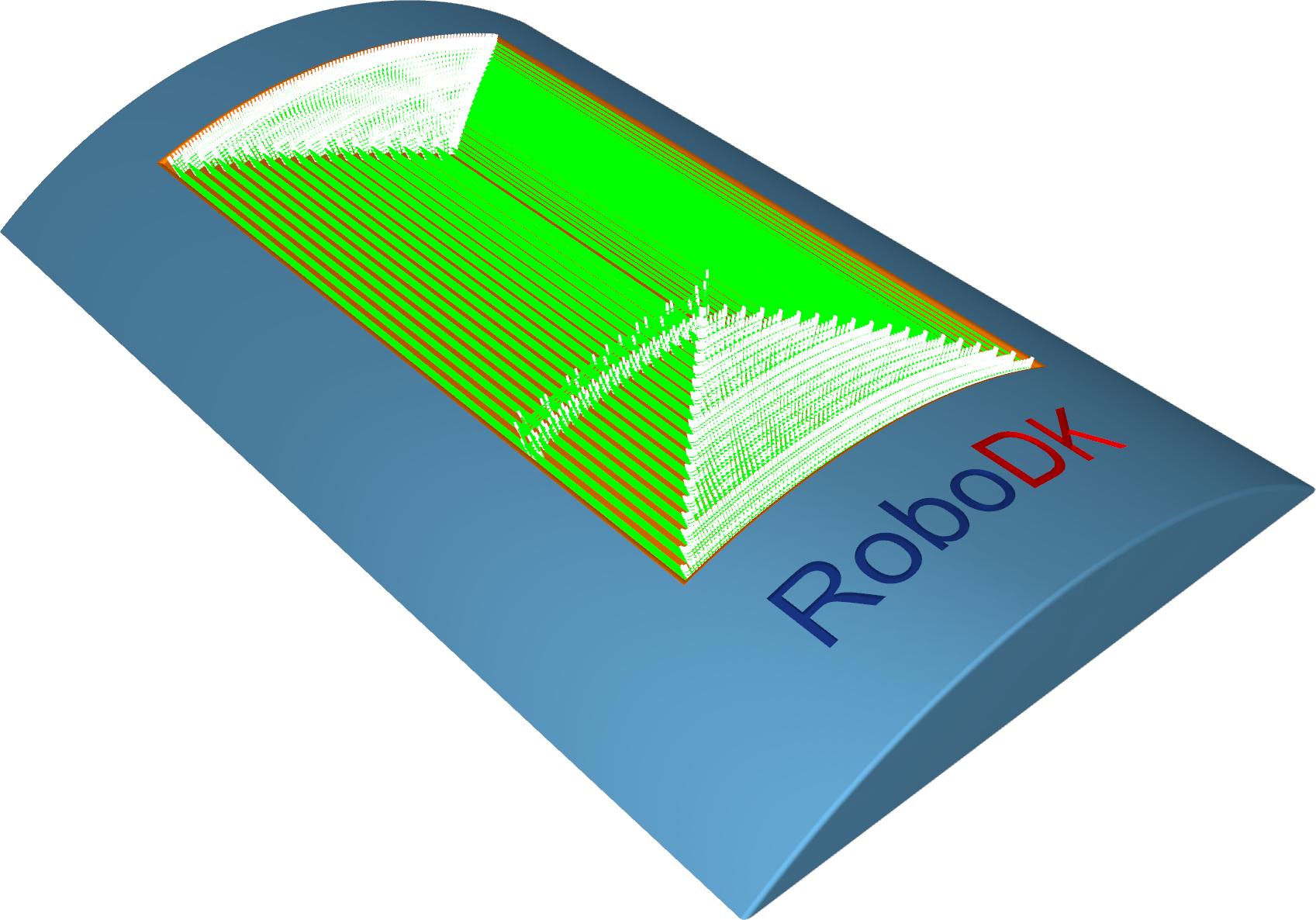
Superficies: línea de flujo
La línea de flujo crea una trayectoria de herramienta que se alinea (o mapea) con el lado corto o largo o a lo largo de las dimensiones paramétricas (U o V) de la superficie dada.
La principal ventaja es que la trayectoria de la herramienta de la línea de flujo se puede crear sin seleccionar geometrías delimitadoras adicionales, como superficies de paredes o curvas de bordes. El paso máximo se puede mantener con una distancia constante, incluso si la topología de la superficie es muy compleja. Además, el tiempo de cálculo es muy rápido.
Estación: CAM-Superficies-Línea de flujo.
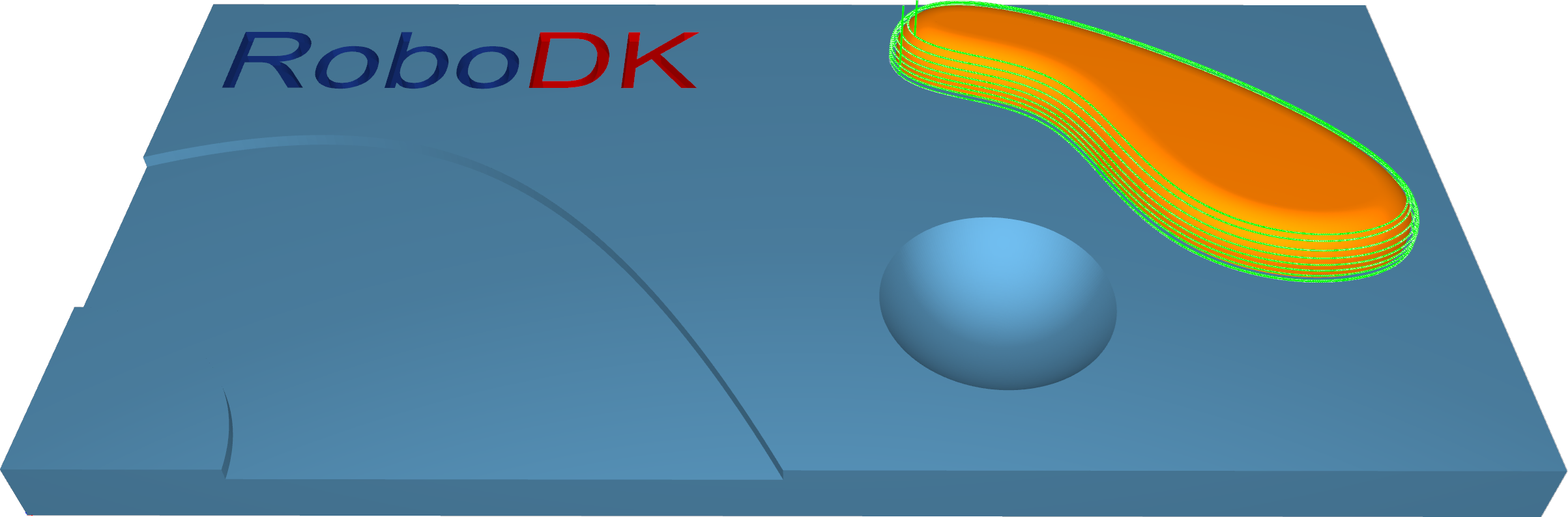
Superficies: transformación entre dos curvas
Esta opción crea una trayectoria de herramienta de morphing entre dos curvas principales, introducidas como «Primera» y «Segunda». Morphing significa que la trayectoria de herramienta generada interpola gradualmente entre las dos curvas y se extiende uniformemente sobre la superficie.
Esta opción es muy adecuada para el mecanizado de áreas empinadas al fabricar moldes.
Estación: CAM-Superficies-MorphBetween2Curves.
Superficies: Morph entre dos superficies
Esta opción creará una trayectoria de herramienta morph en la superficie de accionamiento. La superficie de accionamiento está delimitada por dos superficies de control. Morph significa que la trayectoria de herramienta generada se aproxima entre las superficies de control y se distribuye uniformemente sobre la superficie de accionamiento. En particular, el mecanizado de impulsores con álabes de turbina retorcidos se puede realizar utilizando esta opción.
Bitanencia: la principal ventaja es la posibilidad de compensar la herramienta con respecto a la superficie de accionamiento y comprobar la superficie en las esquinas izquierda y derecha de la pieza de trabajo. Todo lo que tiene que hacer es habilitar el radio de la herramienta desde las opciones (margen), que es la distancia entre el centro de la herramienta y las superficies.
Estación: CAM-Superficies-MorphBetween2Surfaces.
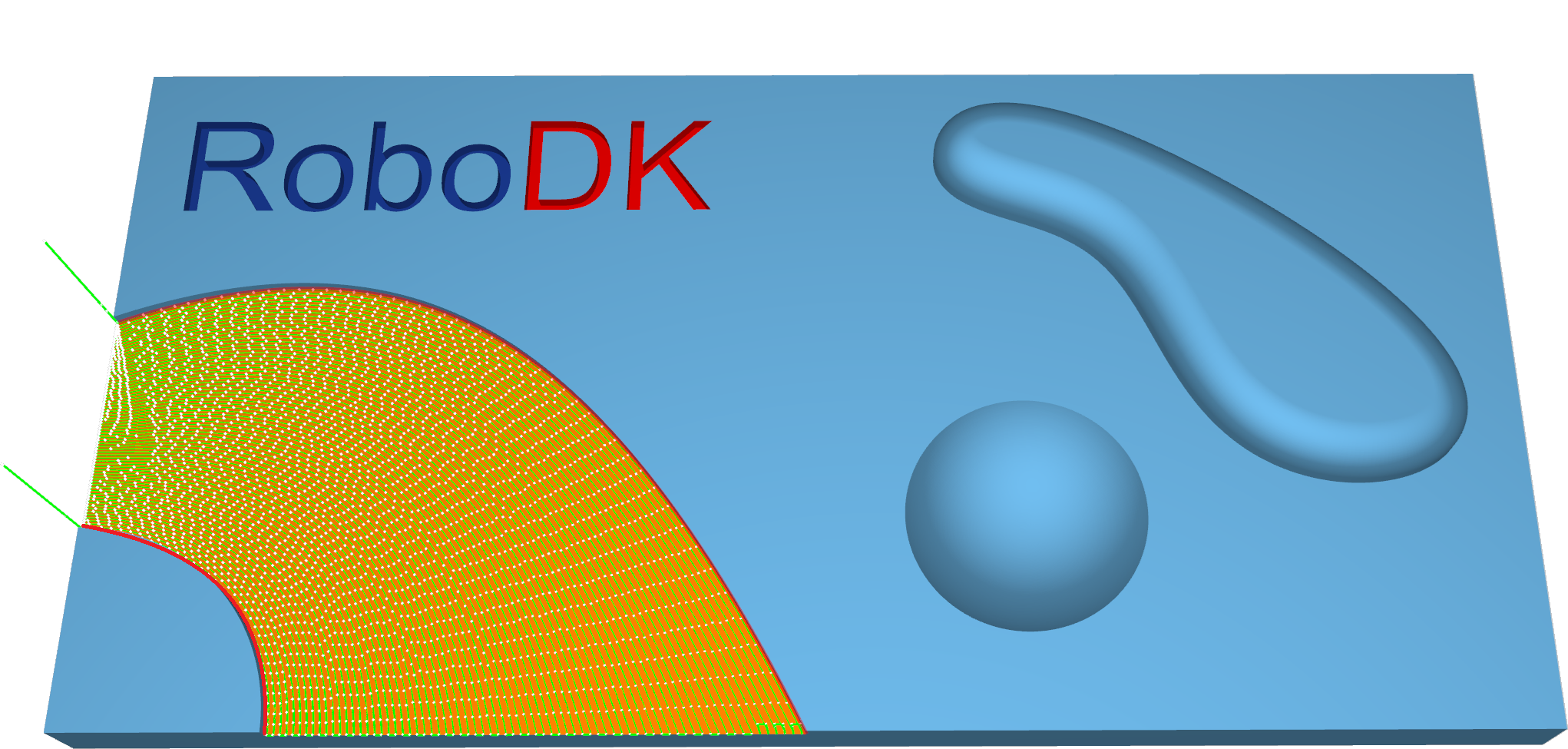
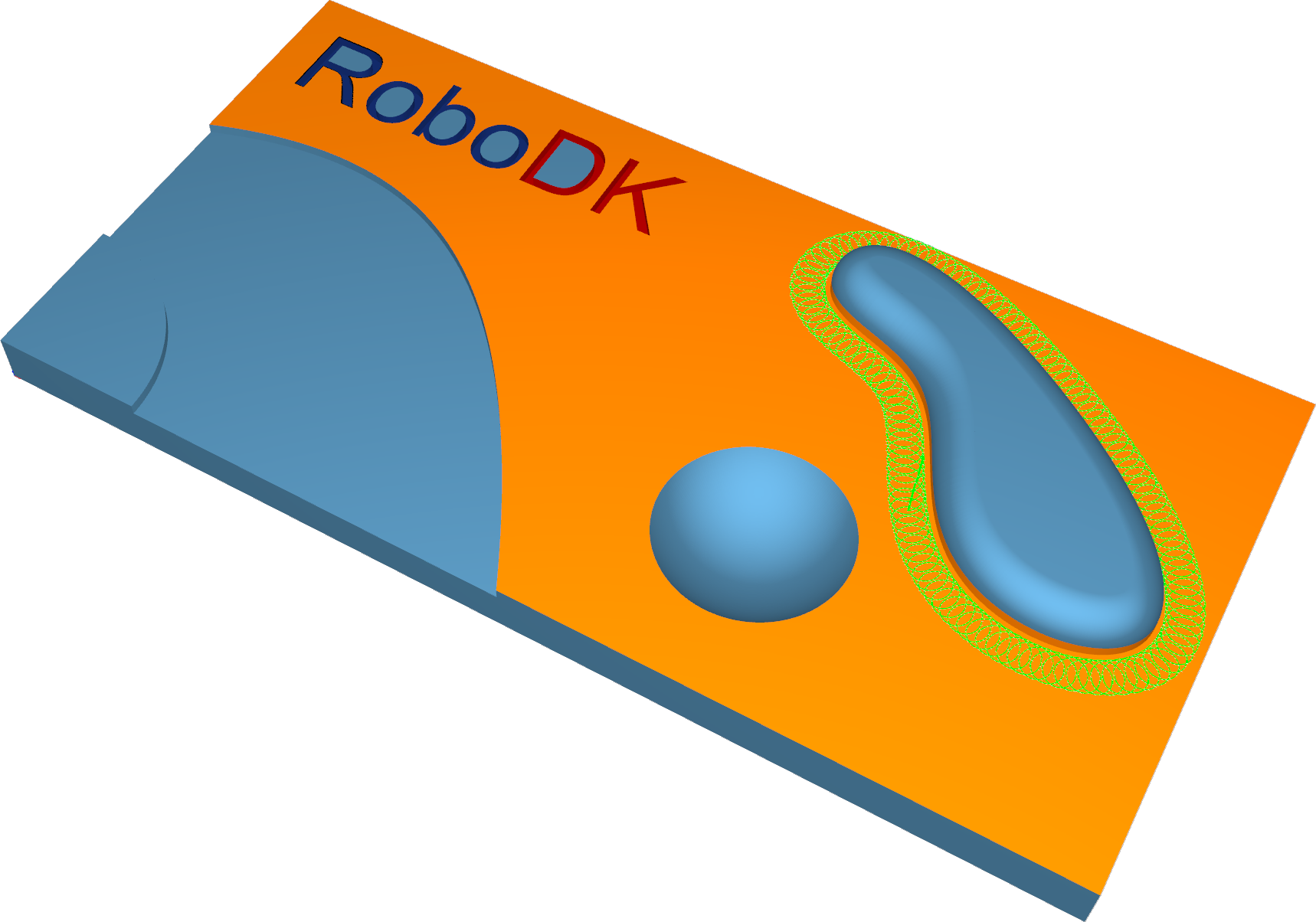
Superficies: paralelo a múltiples curvas
La opción Paralelo a la curva creará segmentos de trayectoria de herramienta paralelos a la curva principal. Los segmentos de trayectoria de herramienta adyacentes son paralelos entre sí. Lo importante aquí es que los cortes no se copiarán simplemente uno al lado del otro. Cada nuevo corte será un desplazamiento del corte anterior.
Notas importantes:
1.La curva debe estar situada exactamente en el borde de la superficie. Por lo tanto, la mejor curva sería el propio borde. Esto es muy importante para la generación de las trayectorias de herramienta. Si no tiene una curva principal adecuada alineada con el borde, se puede generar una trayectoria de herramienta incorrecta.
2.Para curvas independientes en la misma superficie, solo se utilizará la primera curva. Para modelos más complejos, esto significa que es difícil proporcionar la curva inicial adecuada para el mecanizado completo del modelo.
3.Para curvas consecutivas en la misma superficie, todas las curvas deben unirse en una sola curva. Este paso se puede realizar desde cualquier sistema CAD, o puede hacerlo automáticamente el sistema.
4.Para curvas independientes en la misma superficie, solo se utilizará la primera curva. Para modelos más complejos, esto significa que es difícil proporcionar la curva inicial adecuada para el mecanizado completo del modelo.
5.Las curvas múltiples seleccionadas en superficies independientes generarán cortes diferentes en cada superficie.
6.La distancia entre dos segmentos de trayectorias de herramienta adyacentes es el paso máximo.
7.Puede definir un margen para obtener la posición exacta en la que se encuentra la herramienta en el borde con una determinada distancia.
8.Con el patrón Paralelo a múltiples curvas, es posible utilizar múltiples curvas para múltiples superficies. Cada curva se utilizará ahora solo para la superficie más cercana.
Estación: CAM-Superficies-Paralelo2MúltiplesCurvas.
Superficies: paralelo a la superficie
Paralelo a la superficie creará cortes en la superficie de su unidad que son paralelos a una superficie principal.
Estación: CAM-Superficies-Paralelo2Superficie.
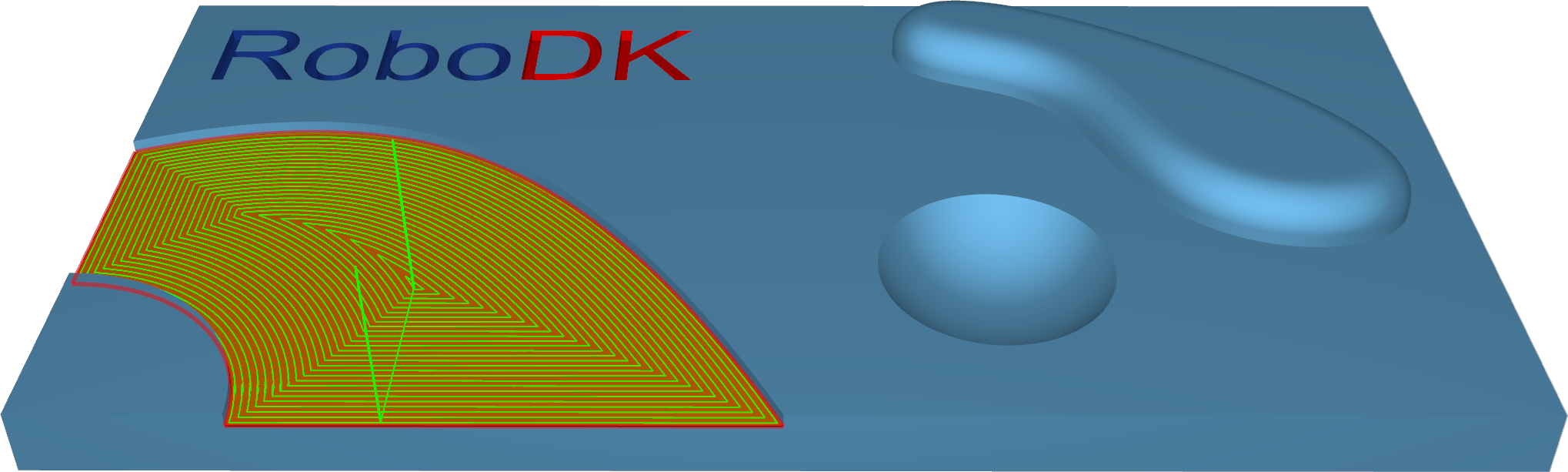
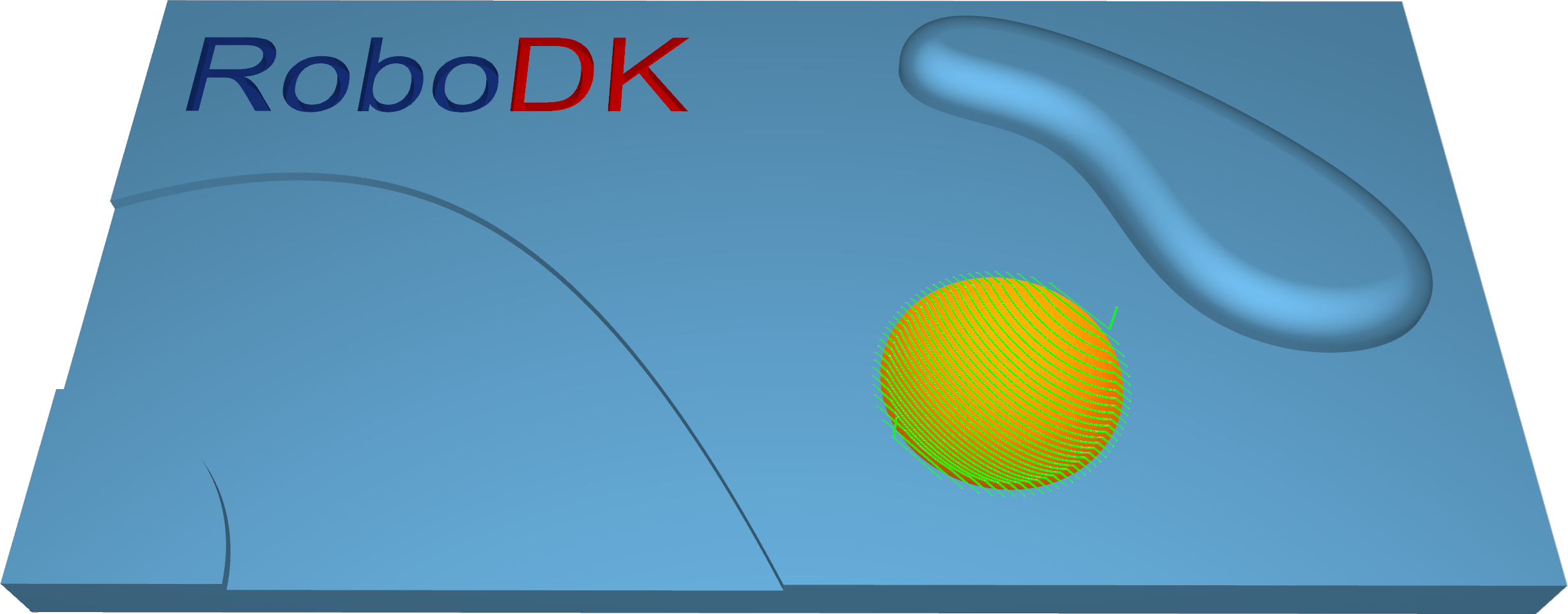
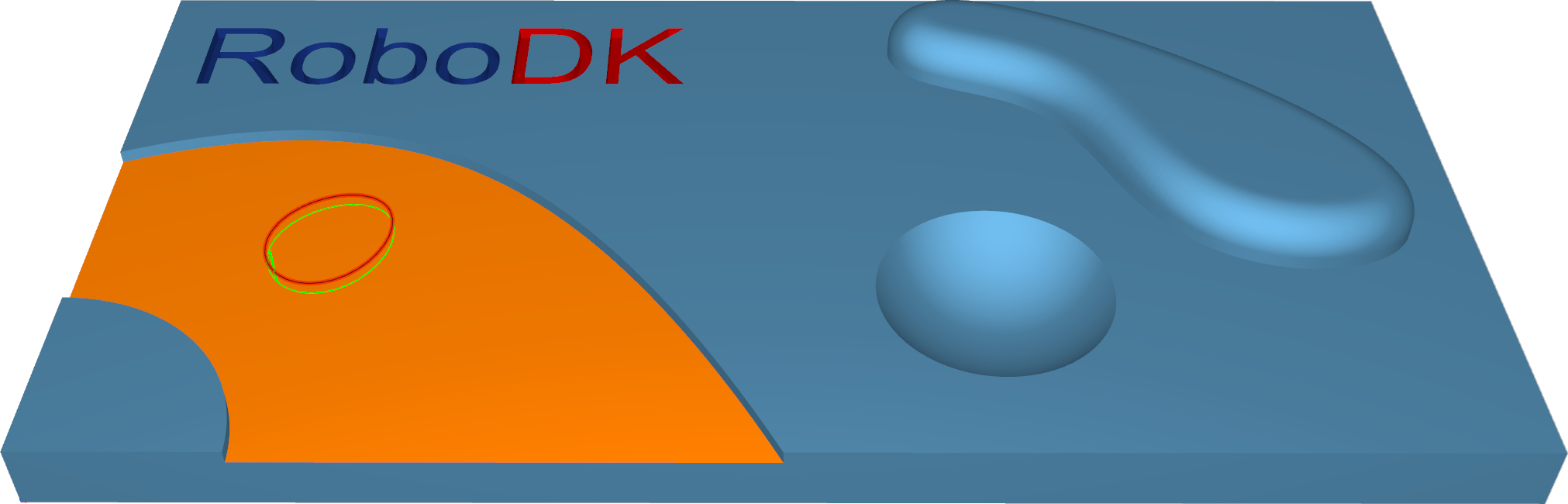
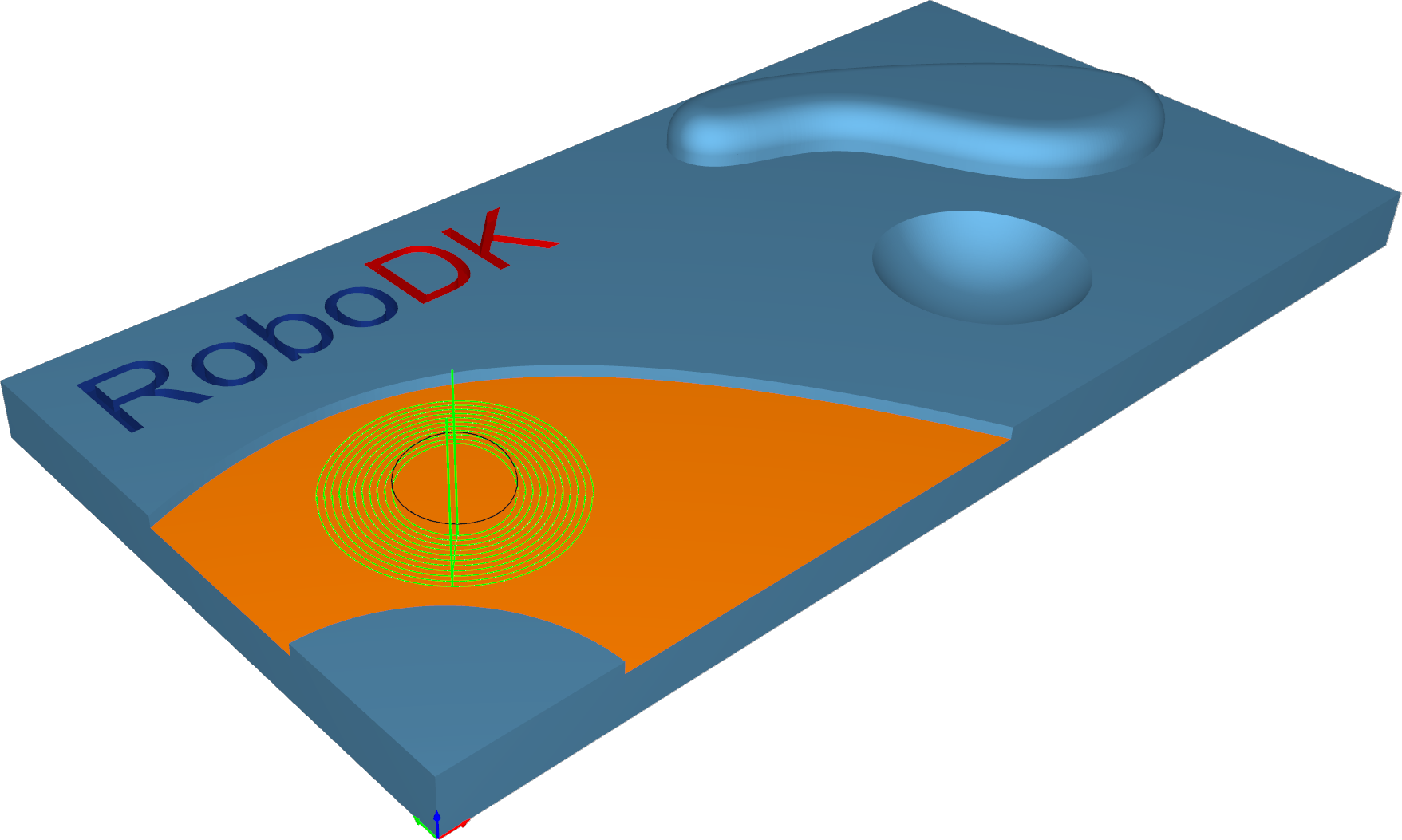
Superficies: proyectar curva
Con este patrón, se puede crear una curva definida por el usuario o un patrón genérico. Hay dos proyecciones de patrones 2D, radial y espiral, y dos proyecciones de curvas 3D: desplazamiento y definida por el usuario.
Estación: CAM-Superficies-ProyecciónCurva.
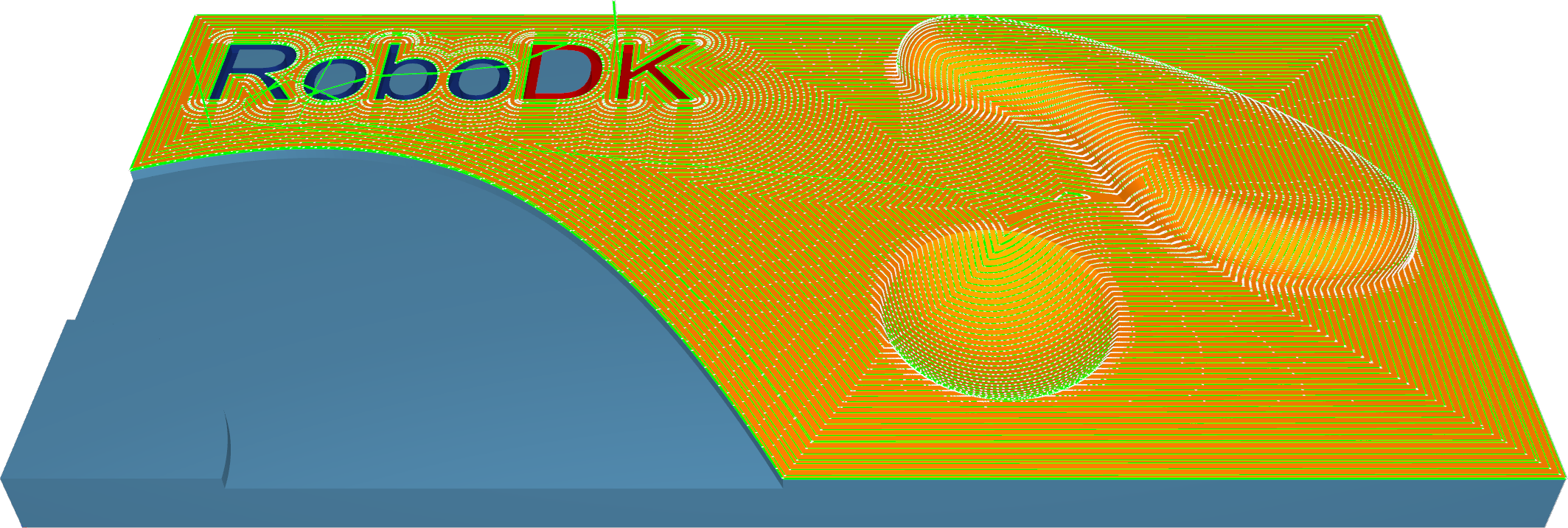
Trimesh–Desbaste
El desbaste es la primera etapa del mecanizado. Esta estrategia se utiliza para eliminar grandes volúmenes de material sobrante muy rápidamente y dejar una pequeña cantidad de material bruto para las estrategias de semiacabado y acabado. Puede utilizar esta estrategia para crear un componente en bruto a partir de un bloque rectangular o con forma de núcleo.
La trayectoria de la herramienta realiza el corte en niveles Z sucesivos, trabajando de arriba hacia abajo. El parámetro «Paso de profundidad» define la distancia entre dos niveles Z. La trayectoria de la herramienta se crea a partir de secciones del modelo y se desplaza hacia afuera. La distancia entre dos desplazamientos se define mediante el paso lateral. Los segmentos de la trayectoria de herramienta se recortan a los límites del bloque. El resultado es un componente en bruto con un efecto de escalera en todo el componente, que se diferencia del componente acabado por un espesor cuyo valor se define en el campo de desplazamiento.
Estación: CAM-Trimesh-desbaste.
Trimesh: cortes paralelos
Esta estrategia permite el mecanizado de componentes 3D con trayectorias de herramienta paralelas entre sí en relación con los ejes X e Y. Se puede establecer cualquier ángulo deseado en el plano XY utilizando el parámetro «Ángulo de mecanizado en X, Y».
Esta estrategia se utiliza generalmente para semiacabar o realizar el acabado de un componente. Es más adecuada para áreas de mecanizado poco profundas.
Estación: CAM-Trimesh-ParallelCuts.
Trimesh–Proyectar curva
En la estrategia Proyectar curva, se proyecta un patrón de curva 2D o 3D sobre la malla triangular para crear una trayectoria de herramienta.
Estación: CAM-Trimesh-ProjectCurve.
Trimesh–Z constante
Esta estrategia permite el mecanizado de componentes 3D con trayectorias de herramienta paralelas a un plano que depende de la dirección de mecanizado. Imagine un componente cortado de arriba abajo.
Esta estrategia se utiliza generalmente para semiacabar o realizar el acabado de un componente. Es más adecuada para mecanizar áreas empinadas, es decir, paredes verticales o casi verticales de un componente 3D.
1.Z constante + cúspide constante: este patrón le permite mecanizar piezas que constan de regiones empinadas y poco profundas en una sola iteración. Las regiones empinadas se mecanizan con la ayuda de cortes Z constantes. Se aplica una cúspide constante para el procesamiento de áreas poco profundas.
2.Z constante + cortes paralelos: este patrón permite mecanizar piezas que constan de regiones empinadas y poco profundas en una sola iteración. Las regiones empinadas se mecanizan con la ayuda de cortes Z constantes. Los cortes paralelos se aplican para el procesamiento de áreas poco profundas.
Estación: CAM-Trimesh-ConstantZ.
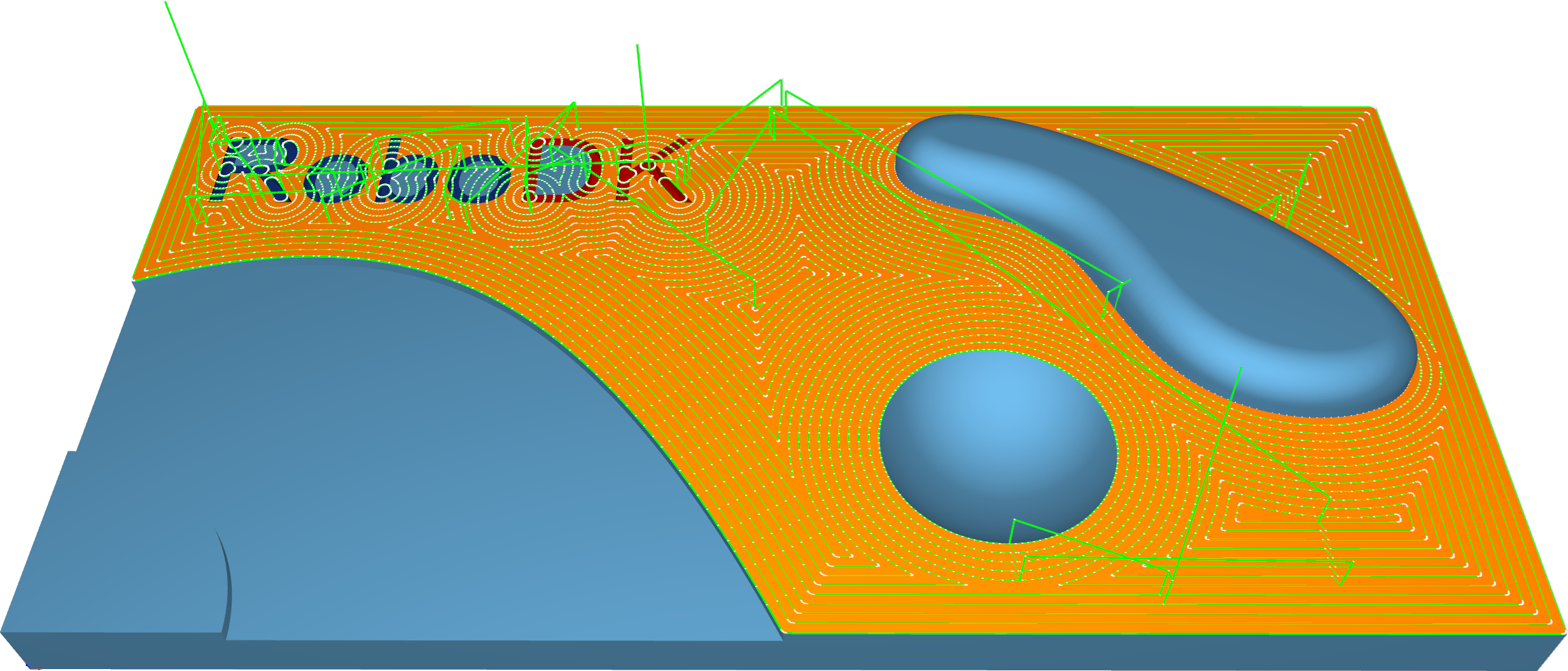
Trimesh–Constant Cusp
Esta estrategia creará un patrón de corte equidistante en las superficies mecanizadas. El objetivo es tener una distancia constante entre cada contorno para que las cúspides creadas tengan la misma altura.
Esta estrategia se utiliza generalmente para semiacabar o realizar el acabado de un componente. Es más adecuada para procesos de mecanizado en áreas empinadas y poco profundas.
Estación: CAM-Trimesh-ConstantCusp.
Trimesh–Flatlands
Esta estrategia está diseñada para mecanizar áreas verdaderamente planas de componentes 3D con trayectorias de herramienta que son segmentos desplazados del límite del área plana. Se utiliza generalmente para el acabado de un componente. Es más adecuada para el mecanizado de áreas planas grandes en múltiples niveles Z.
Las áreas planas, como las superficies de separación, se pueden mecanizar con una fresa de extremo o una fresa de punta redondeada utilizando la estrategia de mecanizado de áreas planas.
Estación: CAM-Trimesh-Flatlands.
Trimesh–Lápiz
Esta estrategia está pensada para proporcionar un procesamiento rápido de esquinas y filetes. Se puede realizar mediante cortes con uno o varios lápices.
Estación: CAM-Trimesh-Pencil.
Trimesh–Trochoidal
La estrategia proporciona un mecanizado secuencial del contorno de la pieza mediante movimientos trocoidales.
Se puede aplicar para realizar el corte de piezas del material bruto.
Estación: CAM-Trimesh-Trochoidal.
Estructura de alambre–Perfilado de 5 ejes
Este cálculo proporciona la generación de trayectorias de herramienta basadas en curvas de accionamiento de entrada de la estructura de alambre. Funciona sin superficies de mecanizado.
La orientación de la herramienta se define mediante líneas de inclinación y es perpendicular a las líneas de orientación. Se requieren ajustes de inclinación, que se pueden controlar mediante las opciones de inclinación. Las orientaciones del eje de la herramienta se interpolan entre las líneas.
Estación: CAM-estructura de alambre-5ax.
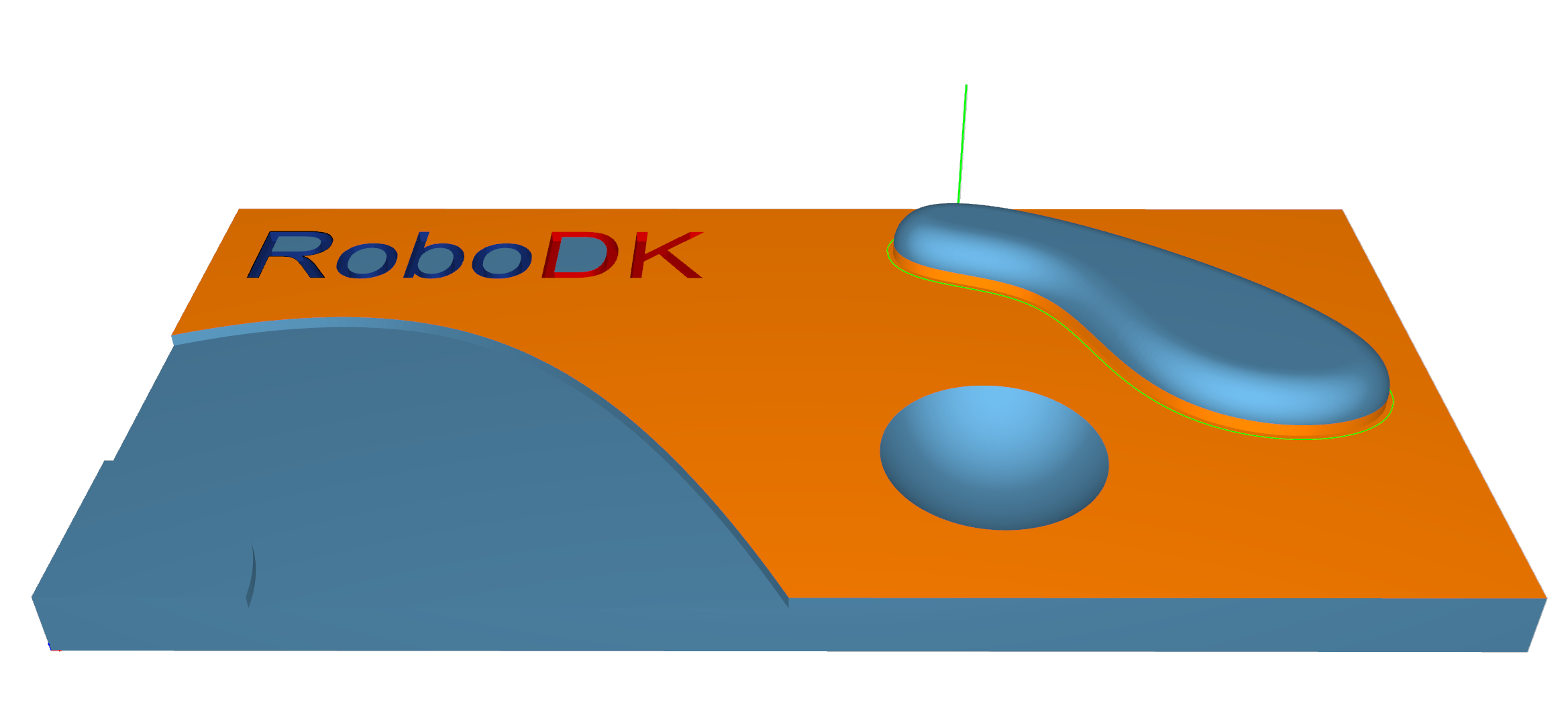
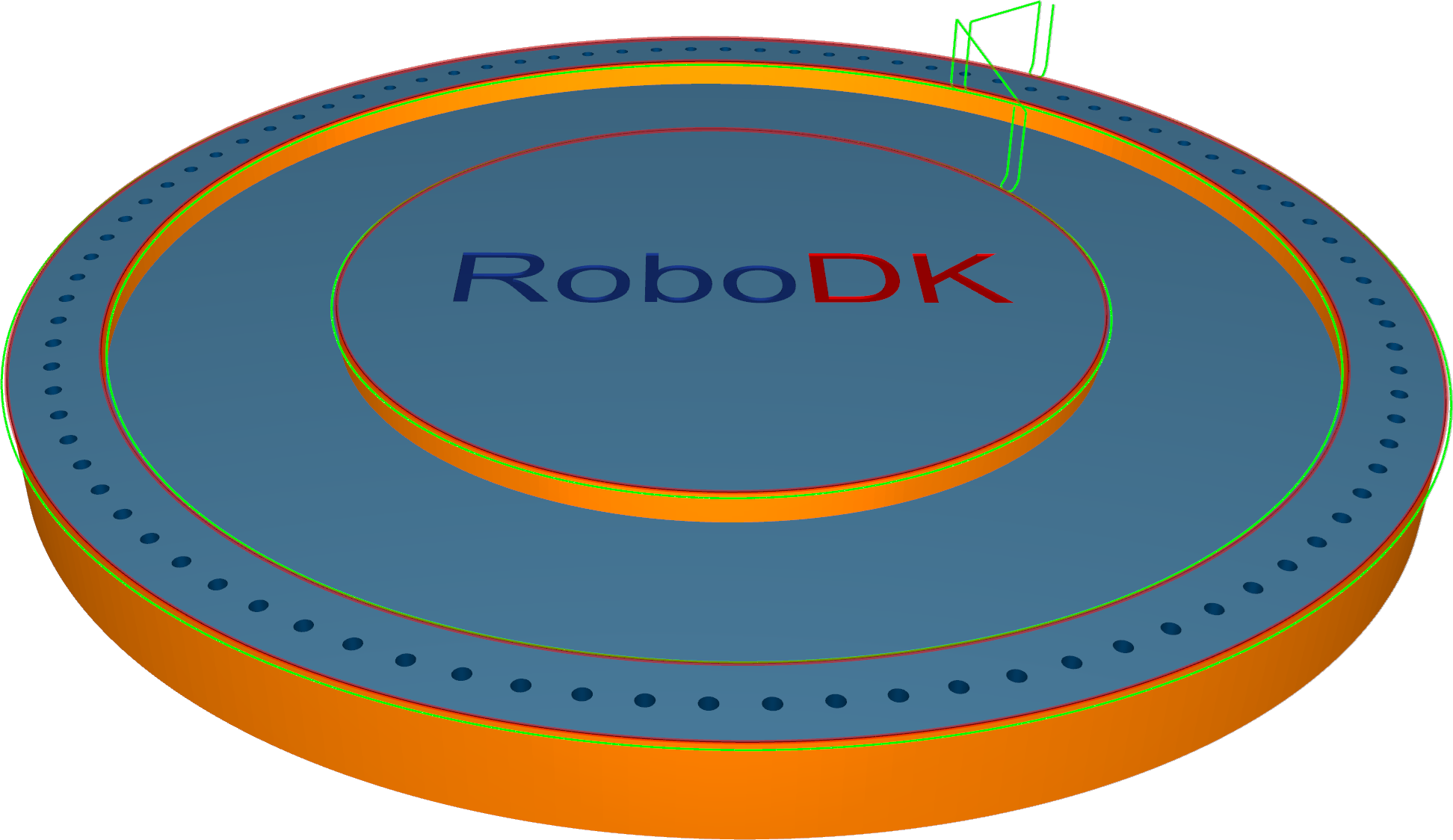
Contorneado
El contorneado es un algoritmo altamente automatizado para crear la trayectoria de la herramienta de recorte de bordes.
La estrategia de cálculo del contorneado está diseñada para el recorte de bordes de materiales delgados. La posición de la herramienta con respecto a la geometría se puede definir mediante varias opciones, desde una salida de solo 3 ejes hasta una salida más compleja de 5 ejes con diferentes opciones de orientación del eje de la herramienta. Una característica clave de este algoritmo es el desplazamiento axial, en el que la herramienta se puede acoplar con un valor determinado al material. El contorno se puede automatizar o definir por el usuario.
Estación: CAM-Contorneado.
Desbarbado
El algoritmo de Desbarbado crea una trayectoria de herramienta de desbarbado en los bordes exteriores de la geometría de una pieza. Por defecto, la orientación de las herramientas esféricas con respecto al borde es el bi-vector entre las dos superficies de ese borde. Los ajustes especiales de inclinación y otras herramientas ajustan la orientación según sea necesario.
Para detectar todos los bordes, la geometría introducida (una malla) debe ser de buena calidad.
Estación: CAM-Desbarbado.
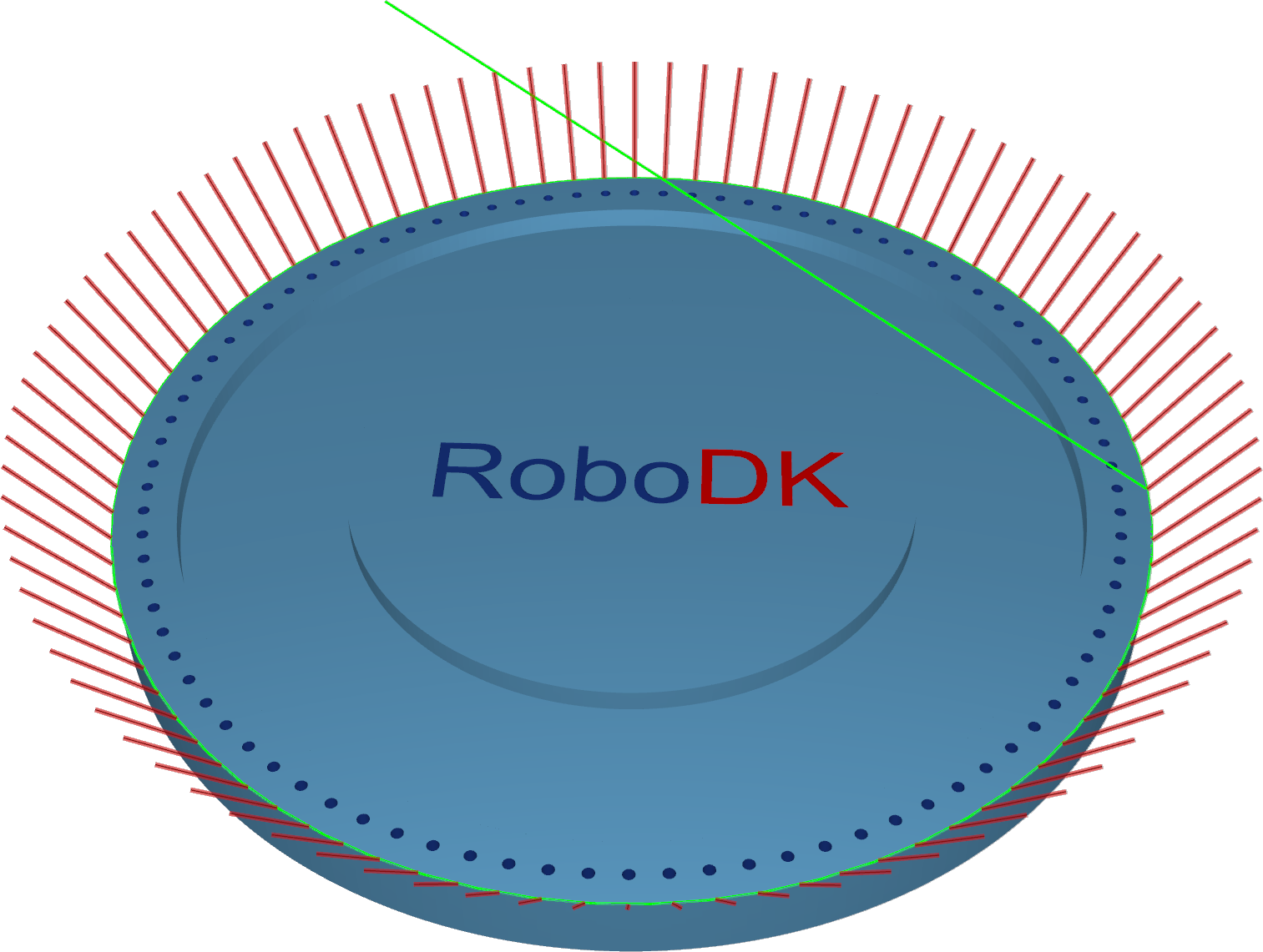
Taladrado
El cálculo basado en puntos de taladrado es un ciclo de taladrado muy básico. Funciona sin necesidad de superficies mecanizadas. Las posiciones y orientaciones del taladro se definirán con puntos o líneas.
En superficie: con puntos/líneas en la superficie, el usuario debe seleccionar puntos/líneas que estén situados directamente en la superficie. La orientación del eje de la herramienta viene determinada por la normal de la superficie.
Puntos: para este ciclo, el usuario debe seleccionar puntos de la geometría. El ciclo de taladrado comienza en los puntos seleccionados. La orientación debe configurarse en la pestaña Control del eje de la herramienta.
Líneas: para este ciclo, el usuario debe seleccionar líneas de la geometría. Las líneas definen la posición y la orientación de la herramienta, así como la profundidad de taladrado.
Estación: CAM-Taladrado-Puntos.
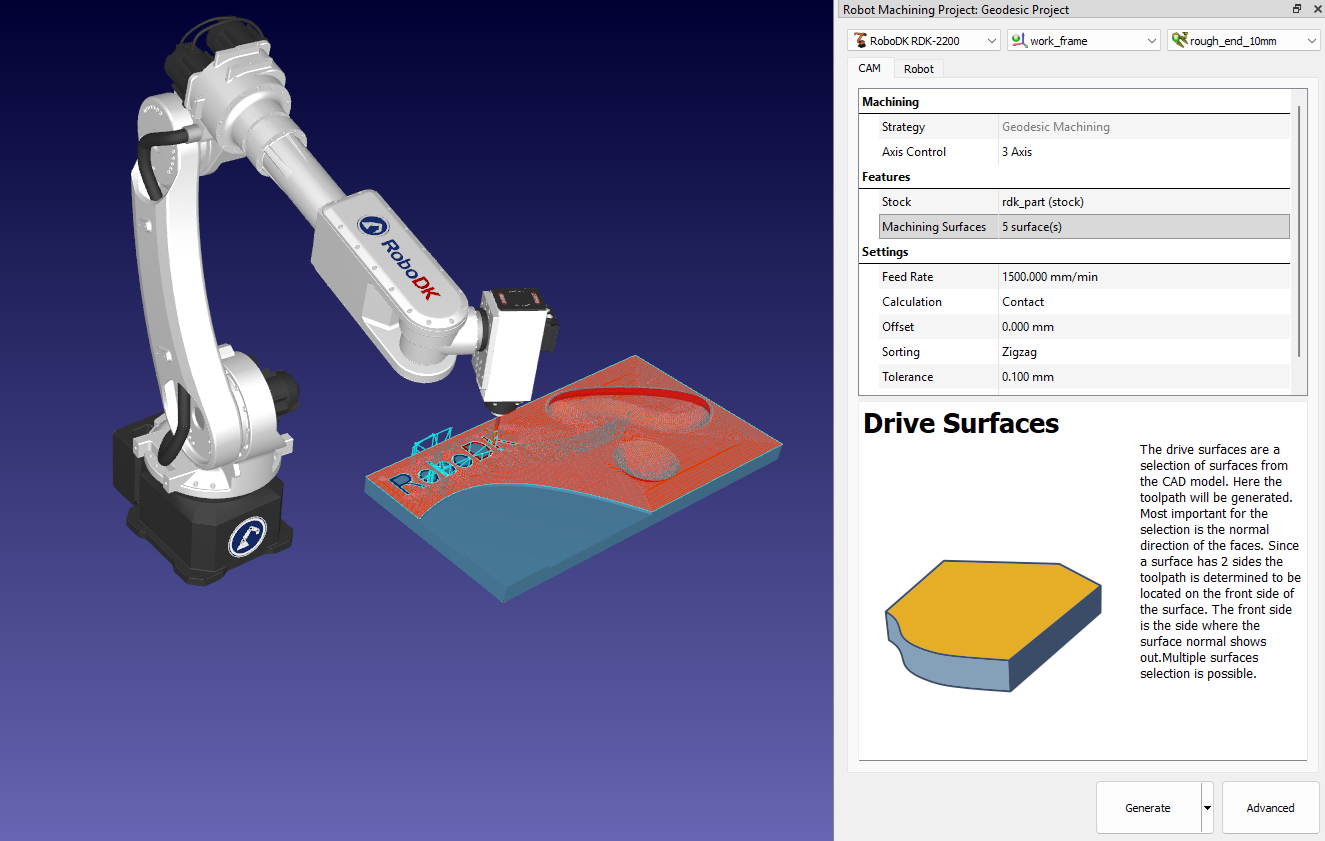
Geodésico
La geodésica es una generalización del concepto de «línea recta» proyectada sobre «espacios curvos». Esas distancias geodésicas se utilizan para crear patrones que tienen en cuenta las distancias en la topología de la superficie.
El mecanizado geodésico ofrece dos modos:
1.El modo de punto de contacto es compatible con todas las herramientas. El resultado es similar al patrón basado en la superficie y no garantiza un patrón sin colisiones con la geometría circundante (por ejemplo, en las esquinas interiores).
2.El modo de centro de herramienta solo es compatible con herramientas esféricas. El cálculo se genera en el espacio de desplazamiento para evitar colisiones con la geometría circundante.
Estación: CAM-Geodésico.
Multieje
El algoritmo multieje crea una trayectoria de herramienta multieje que se puede utilizar para mecanizar geometrías en forma de cavidad. El cálculo utiliza mallas STL y geometrías IGES como entrada. El usuario debe especificar las superficies del suelo, las paredes y el techo, y el sistema crea automáticamente la trayectoria de la herramienta.
El algoritmo de desbaste multieje crea una trayectoria de herramienta multieje que se puede utilizar para desbastar geometrías en forma de cavidad. Los parámetros son idénticos a los del ciclo de desbaste basado en mallas triangulares, que incluye la función de desbaste adaptativo.
El algoritmo Acabado de suelo multieje crea una trayectoria de herramienta multieje para el acabado de geometrías en forma de cavidad. Usted debe especificar las superficies de la pieza y del suelo.
El algoritmo Acabado de pared multieje crea una trayectoria de herramienta multieje que se puede utilizar para el acabado de geometrías en forma de cavidad. El usuario debe especificar el suelo y la pared.
El algoritmo Multiaxis Rest Finish crea una trayectoria de herramienta multieje para el acabado de geometrías en forma de cavidad. El usuario debe proporcionar las operaciones de acabado del suelo y la pared como entrada. El cálculo utiliza curvas de contención alrededor de las áreas sin mecanizar, proporcionadas por el usuario o derivadas automáticamente de operaciones de mecanizado multieje anteriores.
Usted puede elegir qué áreas realizar el mecanizado y qué curvas utilizar como curvas guía seleccionando una de las siguientes opciones:
1.Eje medial: el eje medial se utiliza como curva de accionamiento. La parte principal del eje medial se calcula a partir de las curvas de contención.
2.Límite del suelo: el límite de la superficie del suelo se utiliza como curva guía.
3.No mecanizado: no mecanizar esta zona.
Estación: CAM-Multieje-Desbaste.
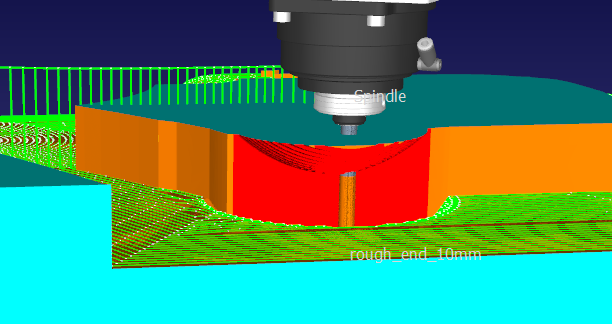
Simulación de remoción de material
La simulación de remoción de material es una visualización dinámica paso a paso del proceso de remoción de material. Proporciona una simulación detallada de cómo una herramienta realiza el corte en una pieza o en el material bruto, lo que le permite observar cada etapa del proceso de mecanizado.
Debe seguir estos pasos para simular correctamente la remoción de material con RoboDK CAM:
1.Se debe definir la fresa.
2.Conecte el robot o el CNC si hay más de un brazo robótico en la estación.
3.Especifique el objeto de material bruto.
4.Habilite la simulación de corte. De lo contrario, la simulación se ejecutará sin remoción de material.
Vincule el robot
Utilice la flecha hacia abajo del botón Vincular robot para abrir un menú con los robots disponibles y vincule la simulación a uno de ellos. Si el botón está seleccionado (el robot está vinculado), al pulsarlo se desconectará el robot de la simulación.
La vinculación entre el robot y la simulación también se puede realizar mediante el menú contextual del árbol de estaciones.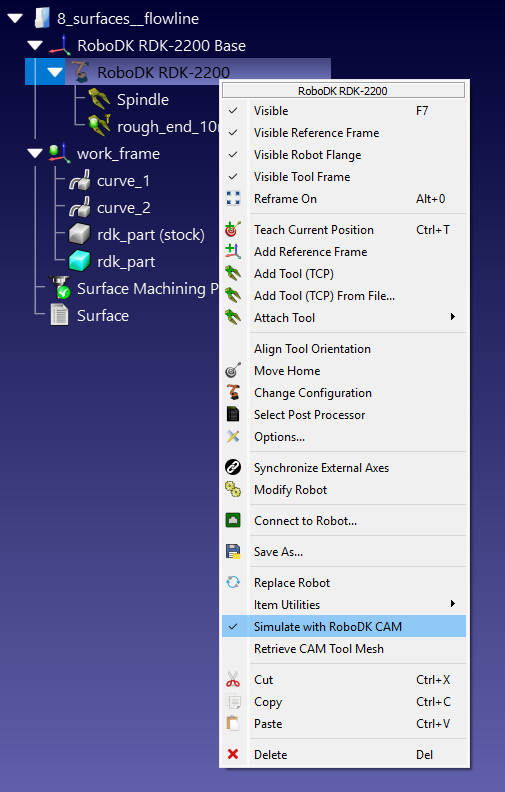
Una vez que el robot está vinculado a la simulación, cualquier movimiento del robot en la ventana RoboDK será repetido por el simulador como movimientos de la herramienta. Independientemente del origen de este movimiento: un programa RoboDK, un script de Python o un movimiento manual con el ratón.
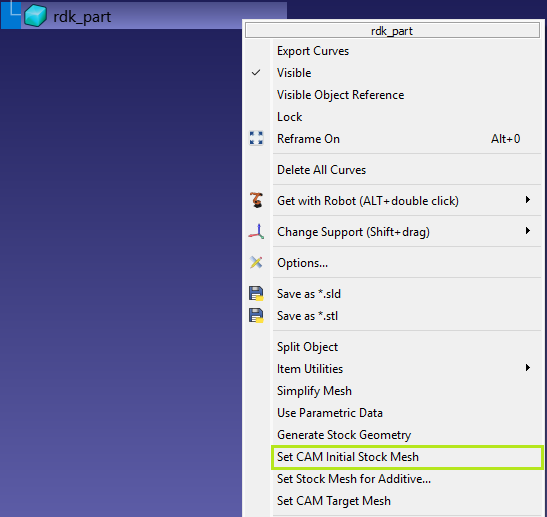
Definición del objeto de material bruto
Haga clic con el botón derecho del ratón en el objeto de material bruto en el árbol de estaciones de RoboDK y seleccione Establecer malla de material bruto inicial CAM.
Generación del objeto de material bruto
Haga clic con el botón derecho del ratón en el objeto de material bruto en el árbol de estaciones de RoboDK y seleccione Generar geometría de material bruto.
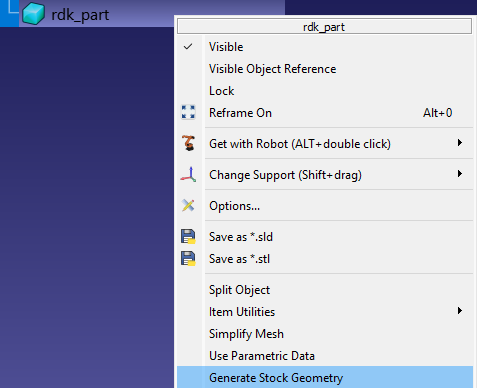
Este comando iniciará la utilidad de creación de material bruto, que utiliza la forma del modelo original para el proceso de generación.
Existen tres métodos para generar material bruto:
1.Cuadro delimitador: pestaña Caja
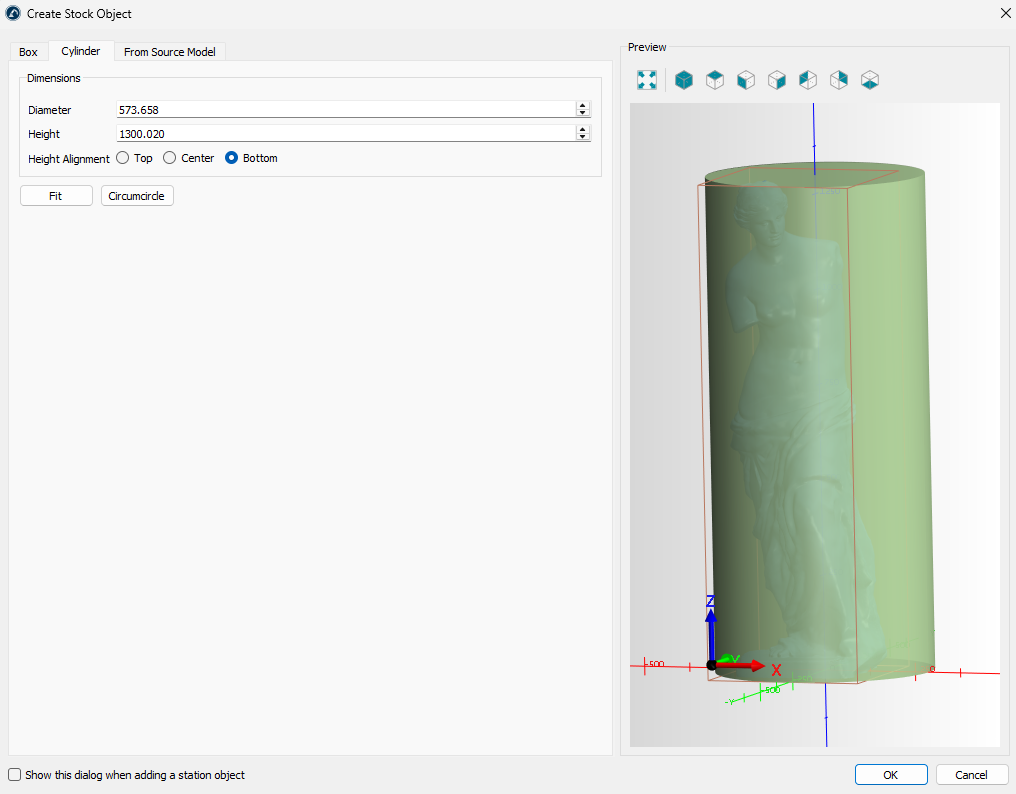
2.Cilindro delimitador: pestaña Cilindro
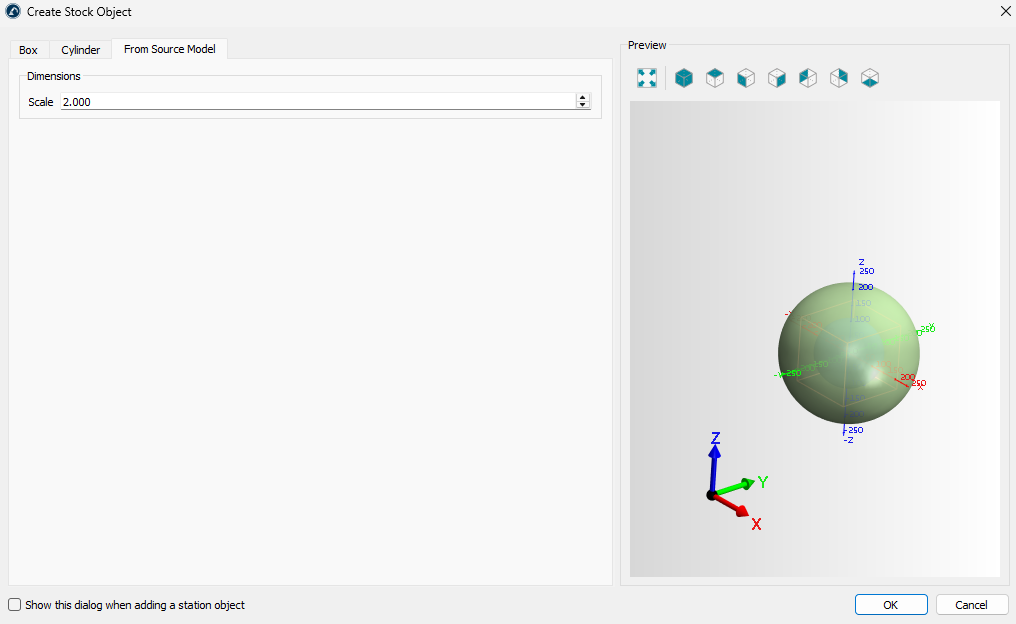
3.Escalado: pestaña Desde modelo de origen
En la pestaña Caja, puede especificar las dimensiones exactas de la caja delimitadora o generarla extrayendo (con el botón Dimensiones originales) y ampliando dimensiones específicas.
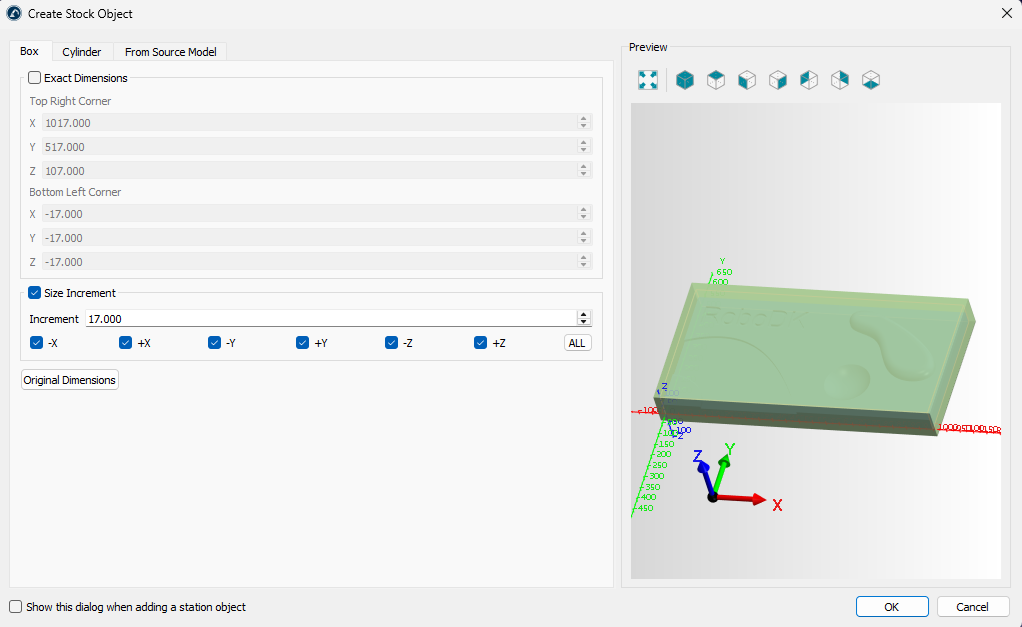
La pestaña Cilindro le permite crear un material bruto en forma de cilindro que contiene el modelo original.
La pestaña Desde modelo de origen le permite crear un material bruto en forma de modelo original escalado.
Vista del material bruto
Una vez completada la definición del material bruto, el modelo de simulación de material bruto se mostrará encima de los demás modelos en la escena de RoboDK. Puede controlar la vista de la simulación de material bruto utilizando el submenú Vista del material bruto de la barra de herramientas:
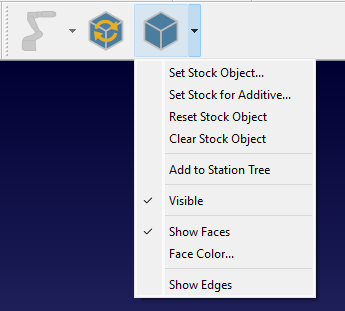
Establecer objeto de stock: define/redefine un objeto de stock.
Establecer material bruto para objeto aditivo: definir/redefinir un objeto de material bruto aditivo.
Restablecer objeto de stock: devuelve el stock a su estado inicial.
Borrar objeto de stock: elimina un objeto de stock.
Añadir al árbol de estaciones: copiar el material bruto en su estado actual como modelo en el árbol de estaciones de RoboDK.
Visible: interruptor de visibilidad del material bruto.
Mostrar caras: muestra las caras del material bruto.
Color de cara...: establezca el color predeterminado para las caras.
Mostrar bordes: muestra los bordes del material bruto.
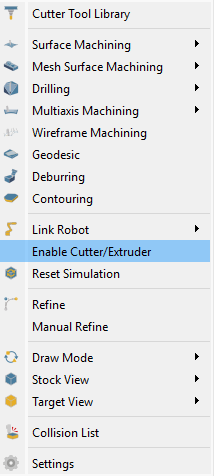
Activar simulación de remoción de material
La simulación de remoción de material se activa automáticamente. Sin embargo, puede controlarla manualmente mediante el comando CAM-Habilitar cortador/extrusor.
Además, es necesario comprobar si la configuración CAM-Configuración-Simulación-Habilitar corte está activa.
Restablecer simulación
El comando de restablecimiento de la simulación devuelve el material bruto a su estado inicial.

Vista de objetivo
Puede comparar el estado actual del material bruto con el modelo objetivo. Para ello, primero debe establecer el modelo objetivo mediante CAM-Vista objetivo-Establecer objeto objetivo y, a continuación, aplicar CAM-Modo de dibujo-Mapa de desviación.
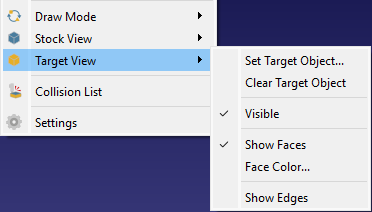
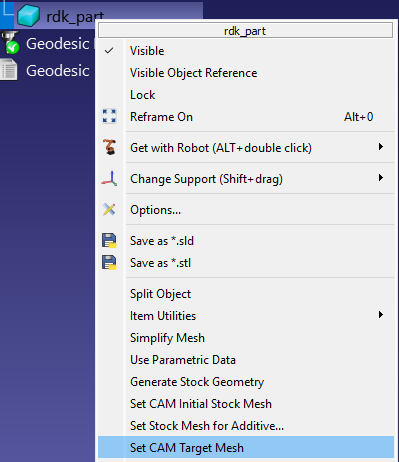
Para establecer el objeto objetivo, también puede hacer clic con el botón derecho del ratón en el modelo en el árbol de estaciones y seleccionar el comando Establecer malla objetivo CAM.
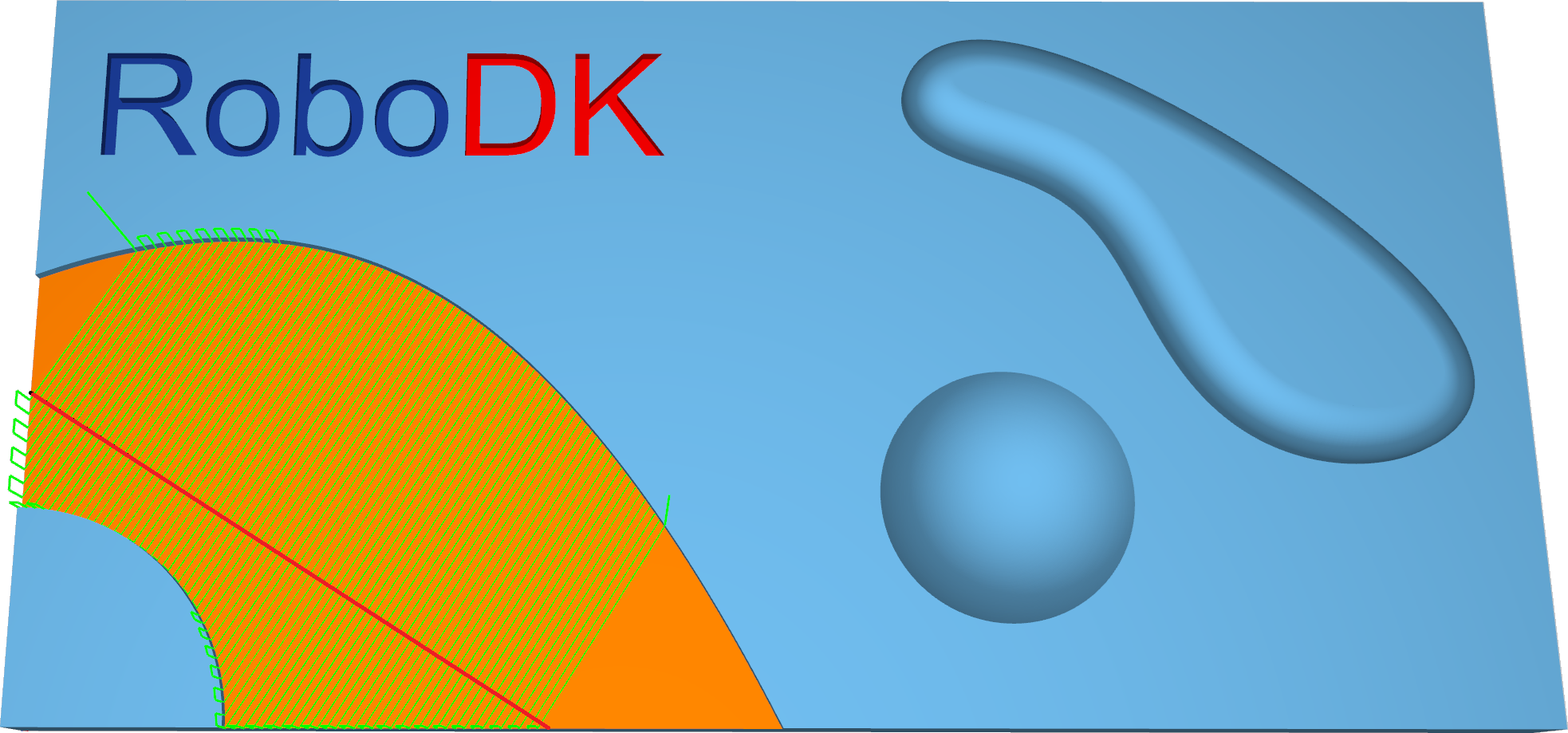
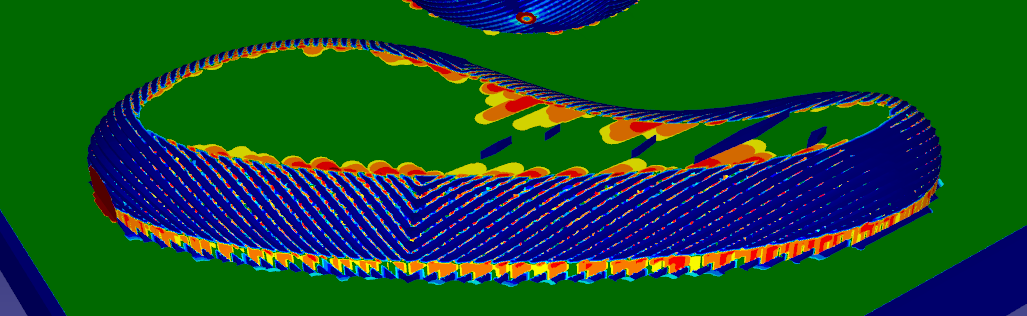
Mapa de desviación
El mapa de desviación muestra la diferencia relativa utilizando una escala de colores que va del verde, que indica que no hay diferencia, al rojo, que indica la mayor diferencia.
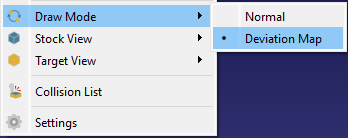
Seleccione CAM-Dibujo Mode-Deviation Map para mostrar el mapa de desviación.
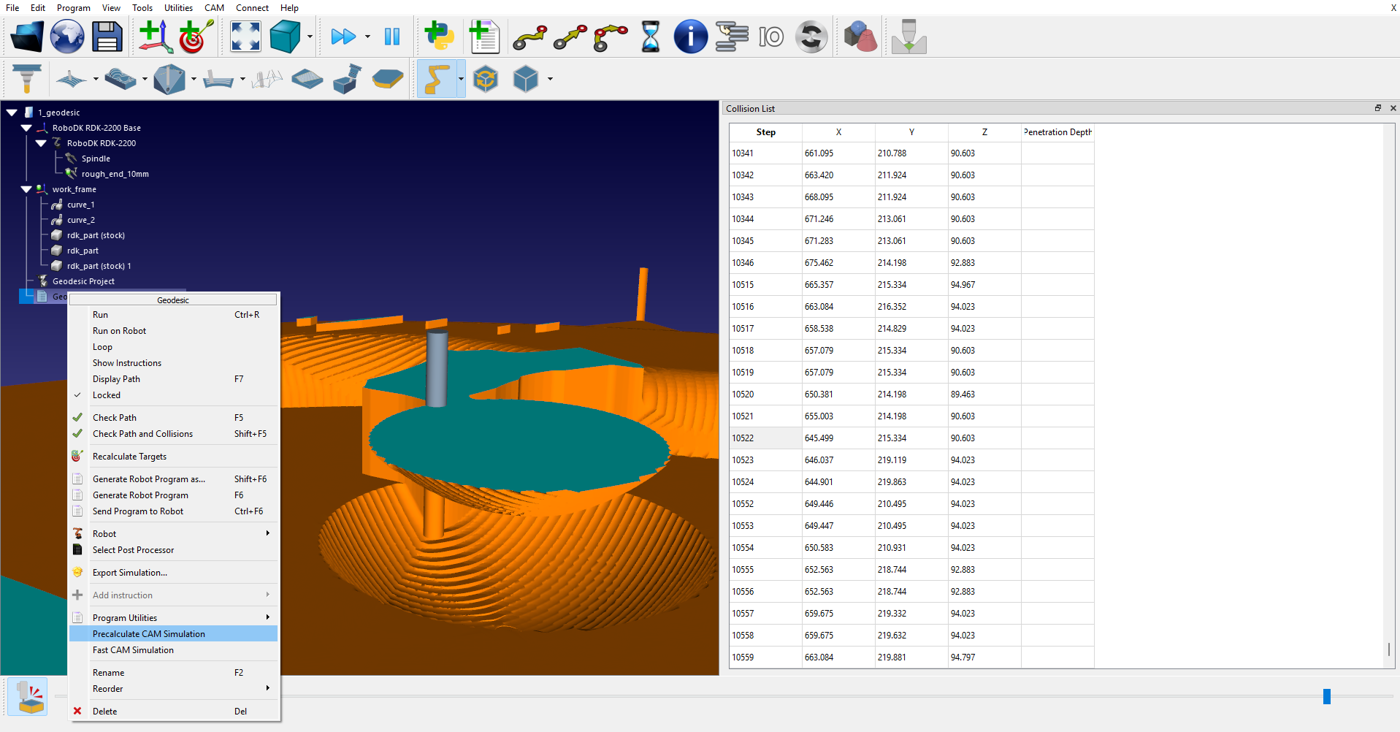
Lista de colisiones
La lista de colisiones muestra la secuencia de colisiones entre las partes no cortantes de la herramienta de corte (por ejemplo, el soporte) y la pieza de trabajo durante el mecanizado.
Seleccione CAM-Lista de colisiones para mostrar la lista de colisiones.
Refinar/Refinar manualmente
Con la opción Refinar activada, puede obtener una visualización de la superficie de mayor calidad durante la simulación (esto puede afectar al rendimiento del renderizado).
Con el comando Refinar manualmente, puede mejorar la visualización de las superficies una vez después de pulsarlo.
Seleccione CAM-Refinar / CAM-Refinar manualmente para realizar la operación de refinado.
Simulación CAM rápida
Puede ejecutar una simulación rápida de la remoción de material. Para ello, haga clic con el botón derecho del ratón en el programa objetivo y seleccione el comando Simulación CAM rápida.
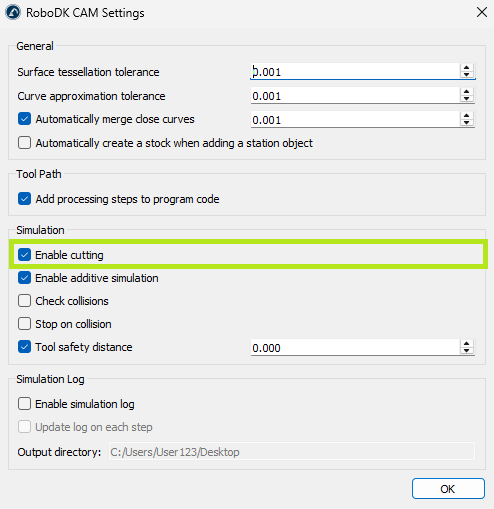
Configuración
Al hacer clic en Configuración CAM, podrá ajustar la configuración predeterminada de RoboDK CAM.
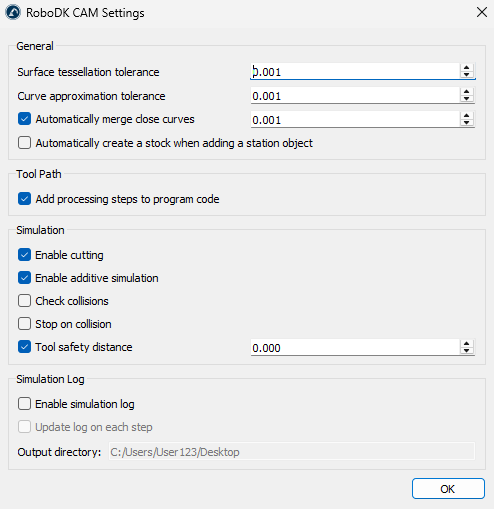
General
El grupo Configuración general incluye ajustes de tolerancia para la importación de modelos. Además, puede habilitar la opción Crear automáticamente material bruto, que mostrará el cuadro de diálogo correspondiente cada vez que añada un modelo a la estación.
Trayectoria de la herramienta
El grupo de ajustes de Trayectoria de herramienta incluye la opción Añadir pasos de procesamiento al código del programa. Cuando esta opción está activada, se añadirá información adicional relacionada con el proceso de mecanizado al programa generado.
Simulación
El grupo de ajustes Simulación incluye parámetros que permiten la simulación de remoción de material/adición de material y la comprobación de colisiones. El parámetro Distancia de seguridad de la herramienta se puede utilizar para especificar una distancia adicional entre las partes no cortantes de la herramienta de corte y el material. Esta distancia se tendrá en cuenta durante la comprobación de colisiones.
Las superficies de colisión se marcarán en rojo.
Registro
El grupo de ajustes Registro de simulación incluye parámetros de registro que pueden ayudar a investigar problemas relacionados con la simulación.