Añadir nuevos objetivos al mapa
Cualquier objetivo nuevo puede añadirse a la hoja de ruta de PRM sin tener que regenerar todo el mapa. Esto significa que la hoja de ruta sólo tiene que regenerarse por completo si se añaden nuevos objetos al espacio de trabajo o se desplazan los existentes.
Cuando se añade un nuevo objetivo a la hoja de ruta, el algoritmo PMR intentará conectarlo a una serie de puntos existentes ya dentro de la hoja de ruta con un conjunto de aristas nuevas. Es posible establecer un número predeterminado de aristas para los nuevos objetivos distinto del elegido para la construcción inicial de la hoja de ruta.
El número máximo de aristas para los nuevos objetivos puede fijarse mediante el siguiente proceso
1.Abra el panel Planificador de movimientos sin colisiones accediendo al menú Utilidades➔ Planificador de movimientos sin colisiones➔ Crear mapa sin colisiones o haga clic en la flecha pequeña situada junto a
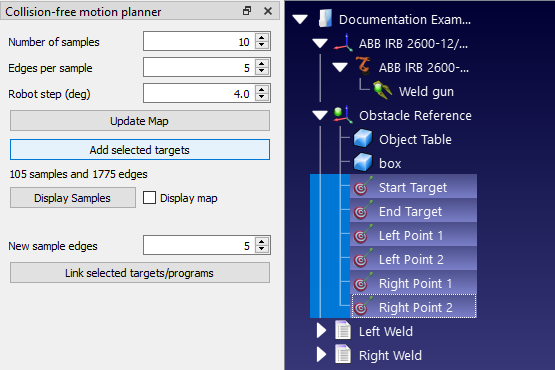
2.Introduzca el número de bordes en la casilla denominada Nuevos bordes de muestra. El valor por defecto es 5.
Hay dos formas de añadir nuevos objetivos a la hoja de ruta:
1.Seleccione los objetivos en el árbol de estaciones. Se pueden seleccionar varios objetivos adyacentes a la vez haciendo clic en el objetivo más alto, manteniendo pulsada la tecla Mayús y, a continuación, haciendo clic en el objetivo más bajo. Pueden seleccionarse múltiples objetivos no adyacentes manteniendo pulsada la tecla Ctrl. A continuación, haga clic en Añadir objetivos seleccionados en el panel Planificador de movimientos sin colisiones.
2.Simplemente utilice el mismo método para Vincular objetivos seleccionados o Vincular programas seleccionados descrito en las secciones anteriores (Vincular objetivos y Vincular programas). Cualquier objetivo que no esté ya presente en la hoja de ruta se añadirá automáticamente.