Configuración para la planificación del movimiento
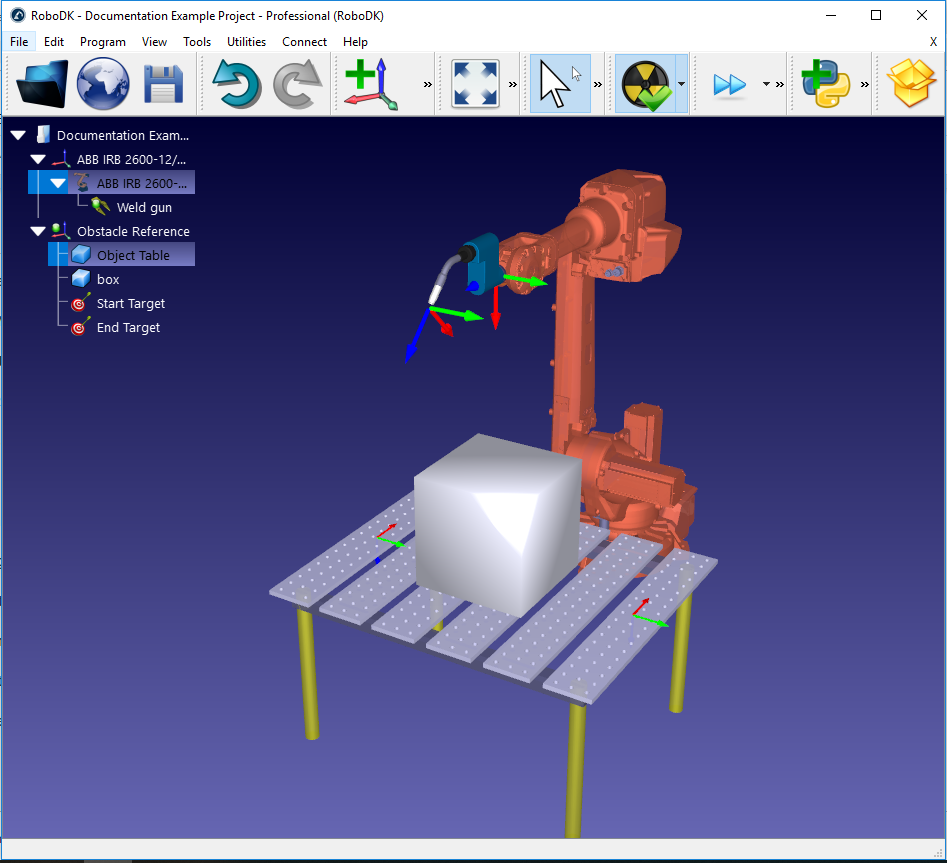
Para utilizar el planificador de movimiento, es necesario que haya un robot, idealmente con una herramienta. También tiene sentido que haya al menos un objeto dentro del espacio de trabajo, de lo contrario no será necesaria la evitación de colisiones. Puede ser útil tener asignados al menos dos objetivos que servirán como ubicaciones inicial y final para la trayectoria sin colisiones generada.
El ejemplo de configuración de soldadura puede crearse siguiendo el siguiente proceso:
1.Seleccione un robot:
a.Seleccione Archivo➔
b.Utilice los filtros para encontrar su robot. Por ejemplo, seleccione el ABB IRB 2600-12/1.85 (elija los siguientes filtros: ABB (marca), 10-20 kg de carga útil y 1500-2000mm de alcance.
c.Seleccione Descargar y el robot debería aparecer automáticamente en la pantalla principal.
2.Seleccione una herramienta:
a.Desde la misma biblioteca en línea, filtre por Tipo➔ Herramienta (haga clic primero en Restablecer filtro para eliminar los filtros anteriores)
b.Descargue una herramienta, por ejemplo la "Pistola de soldadura".
c.La herramienta debe acoplarse automáticamente al robot
d.Una vez cargada la herramienta, se puede cerrar la biblioteca en línea
3.Añada un sistema de referencia:
a.Seleccione Programa➔
b.Seleccione el nuevo sistema de referencia en el árbol y pulse F2 para renombrarlo a "Referencia de obstáculos"
4.Añada algunos objetos:
a.Seleccione Archivo➔
b.Seleccione un objeto, como la "Tabla de objetos.wrl"
c.Arrastre y suelte el objeto sobre la Referencia del obstáculo dentro del árbol de estaciones.
d.Seleccione otro objeto, como "box.stl" y arrástrelo también a la Referencia de obstáculos.
e.Mueva la mesa delante del robot haciendo lo siguiente:
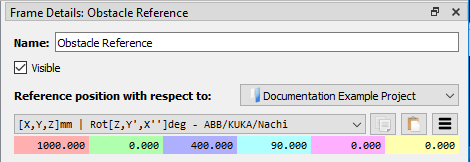
i.Haga clic con el botón derecho en la referencia del obstáculo y elija "Opciones" (o simplemente haga doble clic en la referencia en el árbol) para que aparezca el panel Detalles del marco
ii.Introduzca los siguientes valores en el panel denominado Posición de referencia con respecto a: Proyecto: 1000, 0, 400, 90, 0, 0
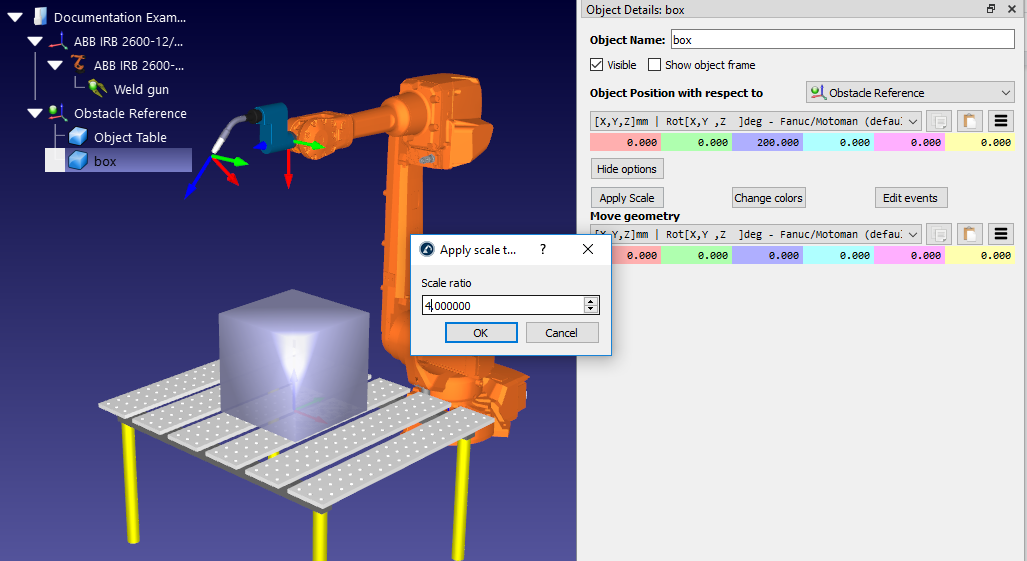
f.Si es necesario, aumente el tamaño y la posición de su objeto (por ejemplo, la "caja") siguiendo estos pasos:
iii.Haga clic con el botón derecho del ratón sobre el objeto en el árbol de estaciones y elija Opciones (o simplemente haga doble clic sobre el objeto en el árbol) para que aparezca el panel Detalles del objeto
iv.Escale la caja haciendo clic en Más opciones➔Aplicar escala e introduzca "4,0" en la relación de escala
v.Desplace la caja sobre la mesa introduciendo los siguientes valores en el panel denominado Posición del objeto respecto a la referencia del obstáculo: 0, 0, 200, 0, 0, 0
5.Cree objetivos:
a.Seleccione el programa➔
b.Seleccione el nuevo Objetivo en el árbol de estaciones y seleccione F2 para cambiarle el nombre a Objetivo de inicio
c.Mueva el objetivo haciendo esto:
vi.Haga clic con el botón derecho del ratón sobre el objetivo en el árbol de estaciones y elija Opciones (o pulse F3) para que aparezca el panel Iniciar objetivo.
vii.Introduzca los siguientes valores en los paneles Posición del objetivo respecto a la referencia del obstáculo: 500, 0, 0, 90, 0, 180
d.Cree un segundo objetivo, del mismo modo, y cámbiele el nombre por Objetivo Final. Utilizando el mismo método que antes, muévalo a la ubicación: -500, 0, 0, 90, 0, 180