Consejos y buenas prácticas
El planificador de movimientos es fácil de utilizar, pero existen algunas prácticas recomendadas que mejorarán el flujo de trabajo de programación.
La fase de construcción puede llevar mucho tiempo. Esto puede resultar engorroso durante las primeras fases de la programación, cuando la disposición de la célula del robot cambia constantemente. Cada vez que se añade un objeto al espacio de trabajo o se desplaza, es necesario volver a generar toda la hoja de ruta.
Para reducir el tiempo de espera hasta que se genere la hoja de ruta, es una buena idea utilizar parámetros más pequeños al principio.
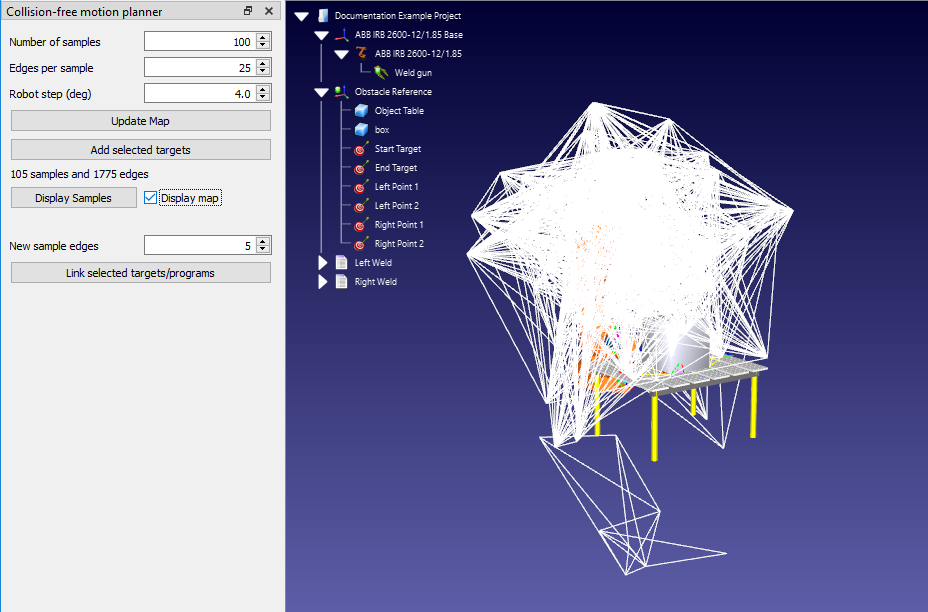
Por ejemplo, normalmente puede generar un mapa sin colisiones con lo siguiente en 10-15 segundos:
1.Número de muestras: 10.
2.Bordes por muestra: 5.
3.Paso del robot (grados): 4.0.
Esto no producirá el movimiento sin colisiones más eficaz, pero permitirá modificar el diseño de la célula mucho más rápidamente.
Cuando se hayan decidido las ubicaciones de todos los objetos de la celda, podrá generarse un mapa más grande (por ejemplo, con los parámetros predeterminados de 100, 25, 4,0).
Por último, antes de generar el programa del robot, puede ser una buena idea generar una hoja de ruta aún mayor (por ejemplo, con parámetros de 500, 50, 2,0). Esto llevará mucho tiempo de generación, pero producirá los movimientos más eficientes.
Establecer los límites de las articulaciones del robot (como se describe en la sección anterior Limitar los límites de las articulaciones) tiene un doble beneficio. En primer lugar, puede hacer que la fase de construcción sea más rápida en algunos casos. En segundo lugar, garantiza que la hoja de ruta contiene realmente ubicaciones que serán útiles para el programa del robot. Es fácil olvidarse de este paso vital.
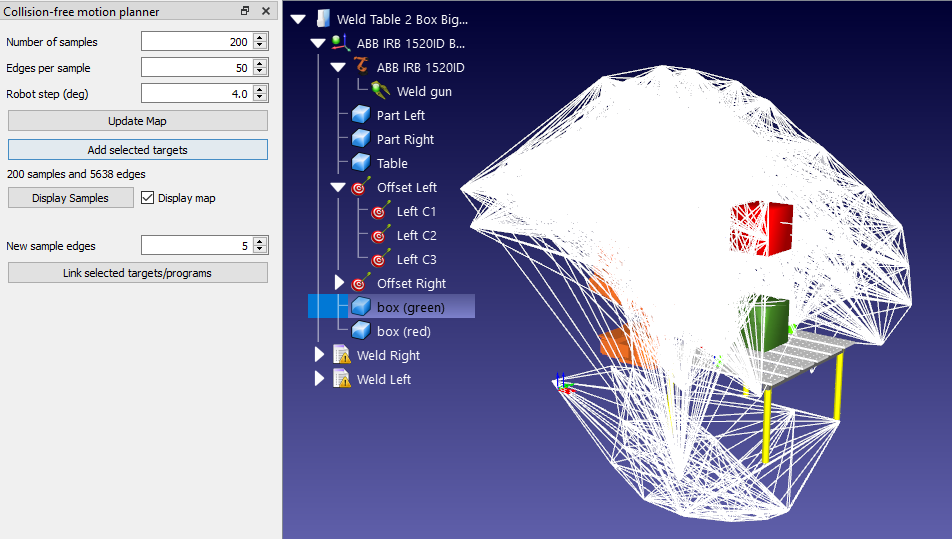
Definir correctamente el mapa de colisión
La detección de colisiones se activa cuando 2 objetos colisionan. Puede especificar la correlación entre cada objeto en movimiento en los ajustes del mapa de colisiones. Reducir el número de interacciones (marcas de verificación verdes) acelerará la comprobación de colisiones.
El tiempo que se tarda en calcular las trayectorias libres de colisiones depende sobre todo del tiempo necesario para comprobar si hay colisiones. Por lo tanto, debe seguir las mejores prácticas para una comprobación de colisiones más rápida descritas en la sección de detección de colisiones. Entre otras cosas, puede aumentar el paso del robot para la comprobación de colisiones, restringir los límites de las articulaciones o simplificar la geometría 3D para acelerar la comprobación de colisiones.
El término "evitación de colisiones" sugiere que el planificador de movimientos siempre evitará las colisiones en todas las situaciones. Esto es ciertamente cierto en el entorno de simulación. Sin embargo, en el mundo real, el robot aún puede colisionar con objetos si se acerca demasiado a ellos. Esto suele ocurrir debido a ligeras diferencias entre el robot simulado y el robot físico.
Un caso común de este tipo de colisiones es cuando el robot "pinza" el borde de un objeto al alejarse de una tarea. Por lo general, esto puede evitarse incluyendo un "desplazamiento" en el programa. Consulte este artículo del blog para obtener más información sobre el uso eficaz de los desplazamientos.
No todas las zonas del espacio de trabajo del robot son iguales. El robot tendrá más "alcanzabilidad" en algunas zonas de su espacio de trabajo que en otras. En las zonas con alta alcanzabilidad, el robot podrá acceder a los puntos desde muchas orientaciones. En las zonas con baja alcanzabilidad, el robot sólo podrá acceder a los puntos desde una o dos orientaciones.
A veces, el planificador de movimiento no consigue encontrar una ruta entre dos objetivos en el espacio de trabajo. A menudo, este problema puede resolverse simplemente aumentando el número de muestras en la hoja de ruta, pero no siempre.
Si el planificador de movimiento falla continuamente al conectar los objetivos, asegúrese de que la tarea se encuentra dentro del área del espacio de trabajo del robot con mayor alcanzabilidad. Visualice el espacio de trabajo del robot abriendo el panel del robot (haga clic con el botón derecho en el robot en el árbol de estaciones y elija Opciones) y seleccionando Mostrar para la herramienta actual en la sección Espacio de trabajo.