Detección de colisiones
Seleccione Herramientas➔
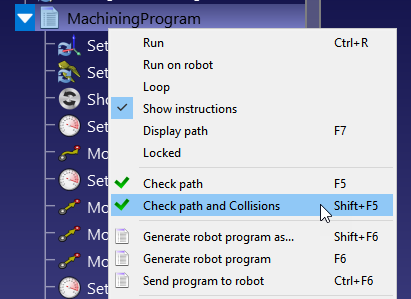
Siga estos pasos para comprobar con seguridad un programa en busca de colisiones:
1.Haga clic con el botón derecho en un programa.
2.Seleccione Comprobar trayectoria y colisiones (Mayús+F5). Esta opción comprueba rápidamente si la ruta es factible (igual que Comprobar ruta - F5) y luego valida que no haya colisiones.
Mapa de colisiones
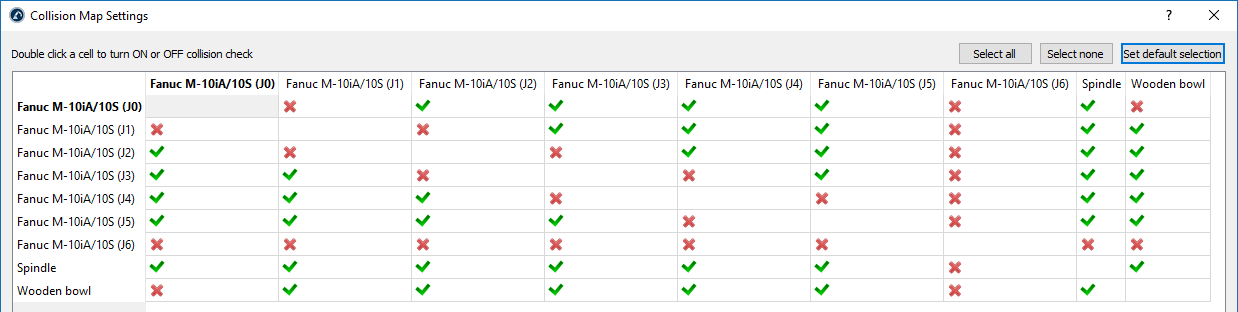
Puede especificar si es necesario comprobar si hay colisiones en la interacción entre cualquier par de objetos.
Seleccione Herramientas➔
Por defecto, RoboDK comprueba las colisiones entre todos los objetos en movimiento de la estación, incluidos todos los eslabones, objetos y herramientas del robot. Como excepción, no se comprueban las colisiones de las articulaciones consecutivas del robot, ya que siempre pueden estar en contacto.
Detección de colisiones más rápida
La velocidad de detección de colisiones depende en gran medida de muchos factores.
1.El número de pares de comprobaciones definidos en el mapa de colisiones. Un mapa de colisiones con menos comprobaciones será más rápido.
2.El paso del robot utilizado para la comprobación de colisiones. El paso de colisión puede modificarse en el menú Herramientas➔ Opciones➔ Movimiento. Los movimientos lineales utilizan el paso en milímetros y los movimientos de articulación utilizan el paso en grados. Un paso mayor proporcionará una comprobación de colisión más rápida pero el resultado puede ser menos preciso.
3.Potencia informática: una mayor potencia informática (CPU más rápida) y más hilos de procesamiento le permitirán disponer de una comprobación de colisiones más rápida.
4.La complejidad de los archivos 3D. Las geometrías con mayor nivel de detalle, como las áreas redondeadas, suelen requerir más potencia de cálculo. Simplificar estas geometrías y reducir el número de triángulos le ayudará a acelerar la comprobación de colisiones.
Debería tener en cuenta las siguientes directrices para una mejor comprobación de la colisión:
1.Elija los formatos STEP o IGES en lugar de los archivos STL para mejorar el rendimiento y la compatibilidad.
2.Simplifique la geometría al máximo.
3.Utilice el Addin simplificar malla para simplificar automáticamente la geometría compleja: https://robodk.com/addins.
4.Para identificar elementos agrupados incorrectamente, active las previsualizaciones de cuadros delimitadores a través de Herramientas➔ Opciones➔ Otros➔ Dibujar cuadros delimitadores (cuando la casilla de colisión esté activada). Asegúrese de que los recuadros delimitadores no abarcan varios elementos separados.
5.Evite utilizar la función "Simplificar objeto..." que encontrará en Herramientas➔ Opciones➔ Visualización. Consolida todas las superficies en un único elemento, dando como resultado un cuadro delimitador extenso, lo que va en contra del punto anterior.
6.Disponga de objetos específicos para colisiones en el entorno: duplique los objetos y elimine las superficies que no puedan alcanzarse, o importe una versión con geometrías más sencillas (por ejemplo, cascos convexos). Utilice el objeto original sólo con fines visuales y exclúyalo del mapa de colisiones.
7.Mediante la API, actualice dinámicamente el mapa de colisiones o establezca elementos invisibles cuando no deban formar parte de la detección de colisiones.