Evitación de colisiones para el mecanizado robotizado
Siga estos pasos para activar la comprobación automática de colisiones y la evitación de colisiones en los proyectos de mecanizado robotizado:
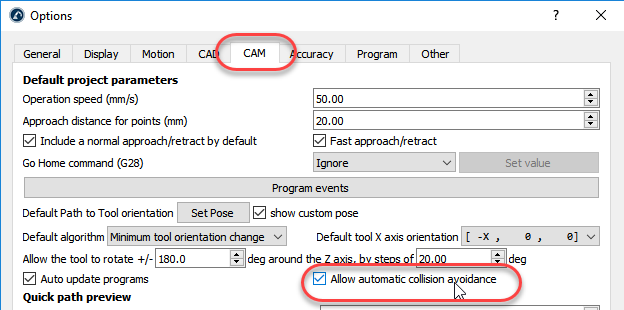
1.Seleccione Herramientas➔ Opciones➔ CAM
2.Comprobar Permitir la evitación automática de colisiones
3.Haga doble clic en su proyecto de mecanizado robotizado, impresión 3D, seguimiento de curvas o seguimiento de puntos.
4.Marque Evitar colisiones: activará la evitación automática de colisiones cambiando la orientación de la herramienta alrededor del eje Z, tal y como se describe en los parámetros de optimización.
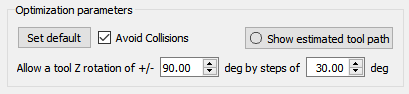
Importante: Esta opción intentará evitar automáticamente las colisiones girando alrededor del eje Z de la herramienta. Asegúrese de que no se comprueban las colisiones del portaherramientas contra la pieza. Si desea comprobar las colisiones entre el portaherramientas y la pieza, es posible que tenga que dividir su husillo en 2 herramientas (una utilizada para la detección de colisiones y otra con información adicional de visualización como la fresa).
Consejo: La detección de colisiones para la trayectoria de mecanizado de un robot puede tardar mucho tiempo en calcularse. Asegúrese de acotar correctamente su mapa de colisiones para ayudar a acelerar el proceso de detección y evitación de colisiones.