Generar hoja de ruta
La "fase de construcción" del planificador de movimiento se consigue mediante el siguiente proceso, que genera una hoja de ruta del espacio de trabajo del robot:
1.Abra el panel Planificador de movimientos sin colisiones accediendo al menú Utilidades➔ Planificador de movimientos sin colisiones➔ Crear mapa sin colisiones, o haga clic en la flecha pequeña situada junto a
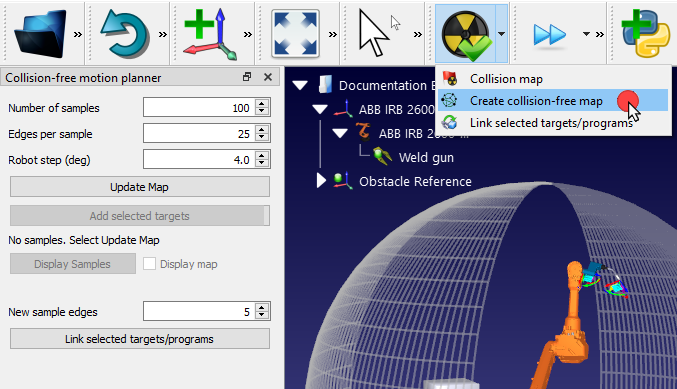
2.Introduzca nuevos parámetros o mantenga los predeterminados.
3.Pulse en Actualizar mapa para generar la hoja de ruta.
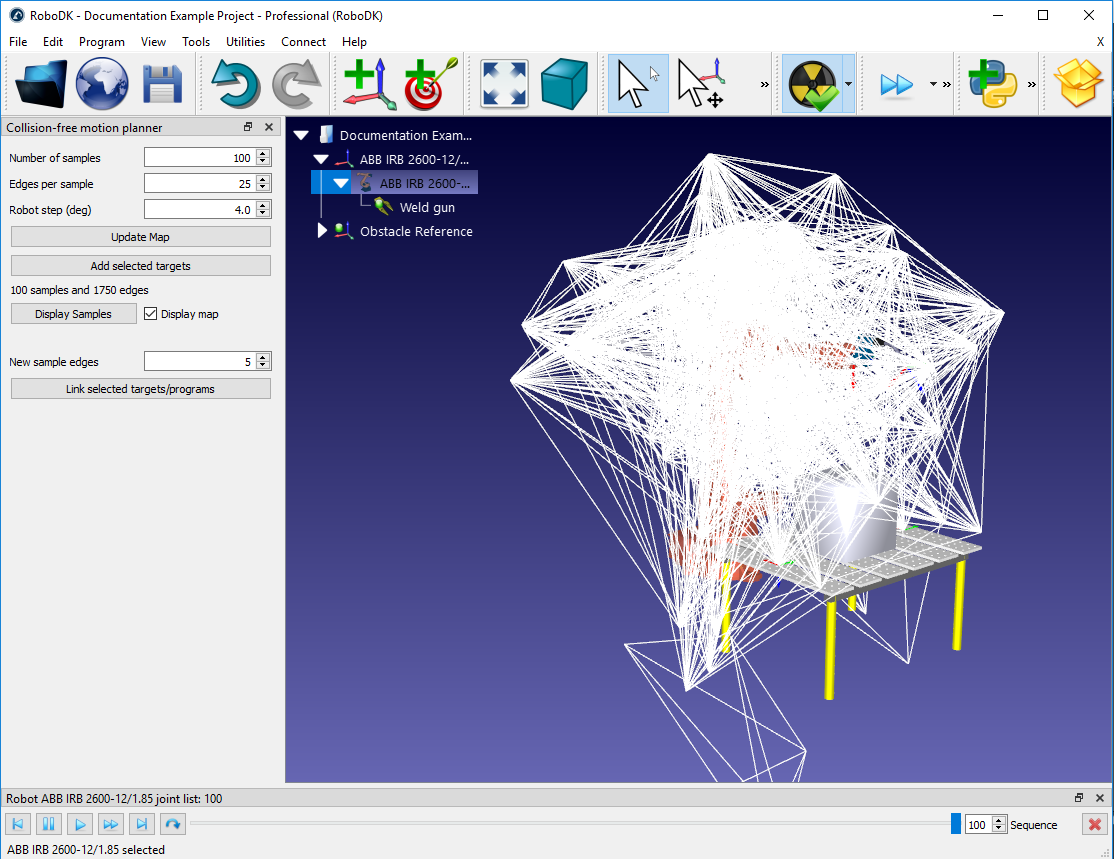
A continuación, el algoritmo PRM generará una hoja de ruta utilizando los parámetros elegidos. Cuando haya terminado, la hoja de ruta generada podrá visualizarse marcando la casilla Mostrar mapa. Al hacer clic en Mostrar muestras, el robot recorrerá todas las muestras del espacio de trabajo.