Puede especificar si es necesario comprobar si hay colisiones en la interacción entre cualquier par de objetos.
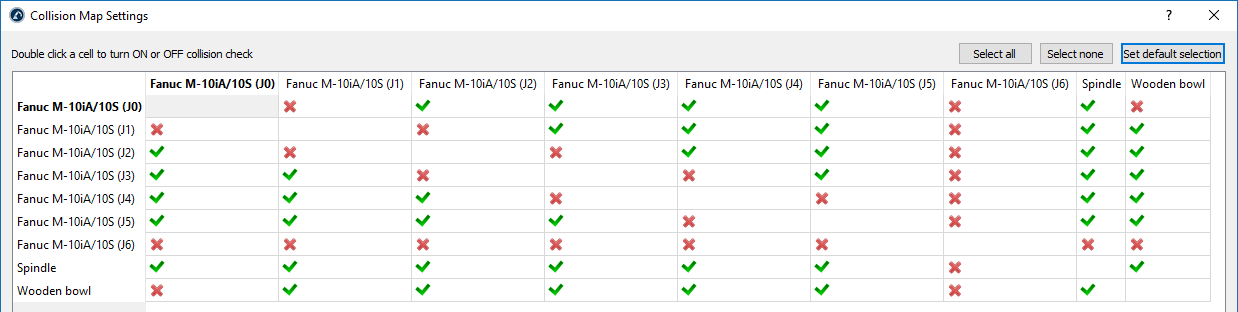
Seleccione Herramientas➔ Mapa de colisiones para visualizar la relación entre todos los objetos en movimiento de la celda y el estado de comprobación de colisiones. Haga doble clic en una celda para activar o desactivar la comprobación de colisión para esa relación. Seleccione Establecer selección por defecto para establecer automáticamente una selección conservadora.
Por defecto, RoboDK comprueba las colisiones entre todos los objetos en movimiento de la estación, incluidos todos los eslabones, objetos y herramientas del robot. Como excepción, no se comprueban las colisiones de las articulaciones consecutivas del robot, ya que siempre pueden estar en contacto.
Consejo: Haga doble clic en el caso de la diagonal para comprobar/desproteger las colisiones de un objeto específico contra todos los demás objetos.
Consejo: Si la simulación se ralentiza debido a la comprobación de colisiones, puede ser mejor reducir el número de comprobaciones para utilizar menos potencia informática en la comprobación de colisiones.