Restringir los límites conjuntos
No es habitual que una tarea utilice todo el espacio de trabajo del robot. Al crear un mapa PMR, suele ser una buena idea restringir los límites de las articulaciones del robot. Esto acelerará el proceso de generación del mapa y garantiza que los puntos dentro de ese mapa estén situados en el mejor lugar.
Para los robots de 6 ejes, las dos articulaciones que se restringen con más frecuencia son:
1.Articulación 1 (la articulación base) - Restringir esta articulación impide que el robot se desplace demasiado hacia cualquier lado del espacio de trabajo.
2.Articulación 3 (la articulación del codo) - Restringir esta articulación impide que el robot cambie entre las configuraciones de codo arriba y codo abajo.
Modifique los límites de la junta mediante el siguiente proceso:
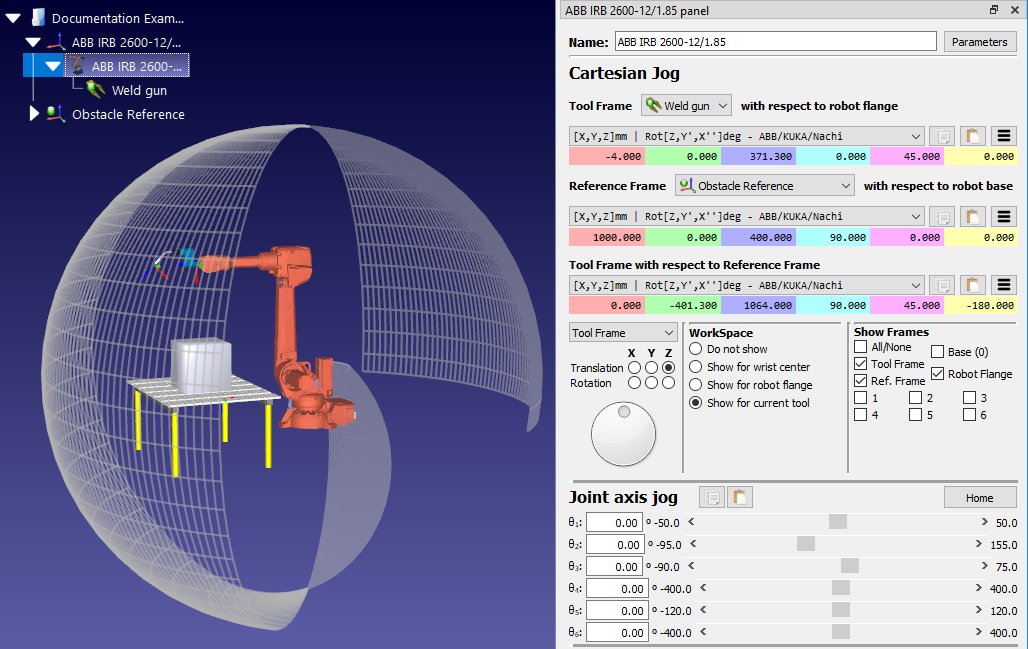
1.Haga clic con el botón derecho del ratón en el icono del modelo de robot dentro del árbol de estaciones (por ejemplo, ABB IRB 2600-12/1.85) y seleccione Opciones... para abrir el panel del robot. Alternativamente, basta con hacer doble clic sobre el nombre del robot en el árbol de estaciones.
2.En la sección de desplazamiento del eje de la articulación, mueva los controles deslizantes de las articulaciones del robot que desee restringir (por ejemplo, θ1 y θ3) para encontrar dónde desea que estén los límites inferiores de la articulación.
3.Haga doble clic en cualquiera de los límites inferiores de articulación dentro del jog del eje de articulación. Por ejemplo, si el límite de articulación de θ1 es actualmente -180, haga doble clic en el número -180. Esto hará que aparezca el panel Establecer límites inferiores de articulación.
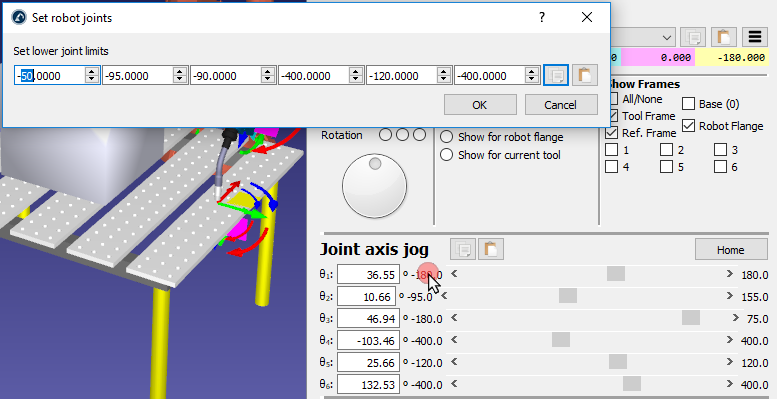
4.Fije los límites inferiores de la junta en θ1 = -50 y θ3 = -90.
5.Cambie los límites de la junta y pulse OK.
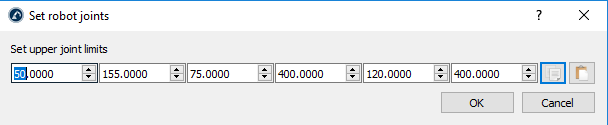
6.Utilizando el mismo proceso con los límites superiores de la junta, fije θ1 = 50.
Este cambio puede verse visualizando el espacio de trabajo alcanzable del robot. Muestre el espacio de trabajo seleccionando la opción Mostrar para la herramienta actual en la sección Espacio de trabajo del panel del robot. Mostrará sólo la parte del espacio de trabajo que ahora es alcanzable con los nuevos límites de articulación.