Calibración mano-ojo
El calibrado manual es el proceso de calibrar la posición de la cámara con respecto a la brida o la herramienta del robot.
RoboDK le permite simular el proceso de calibración ojo-mano. Puede utilizar el mismo procedimiento para calibrar cámaras reales con respecto a la brida o la herramienta del robot.
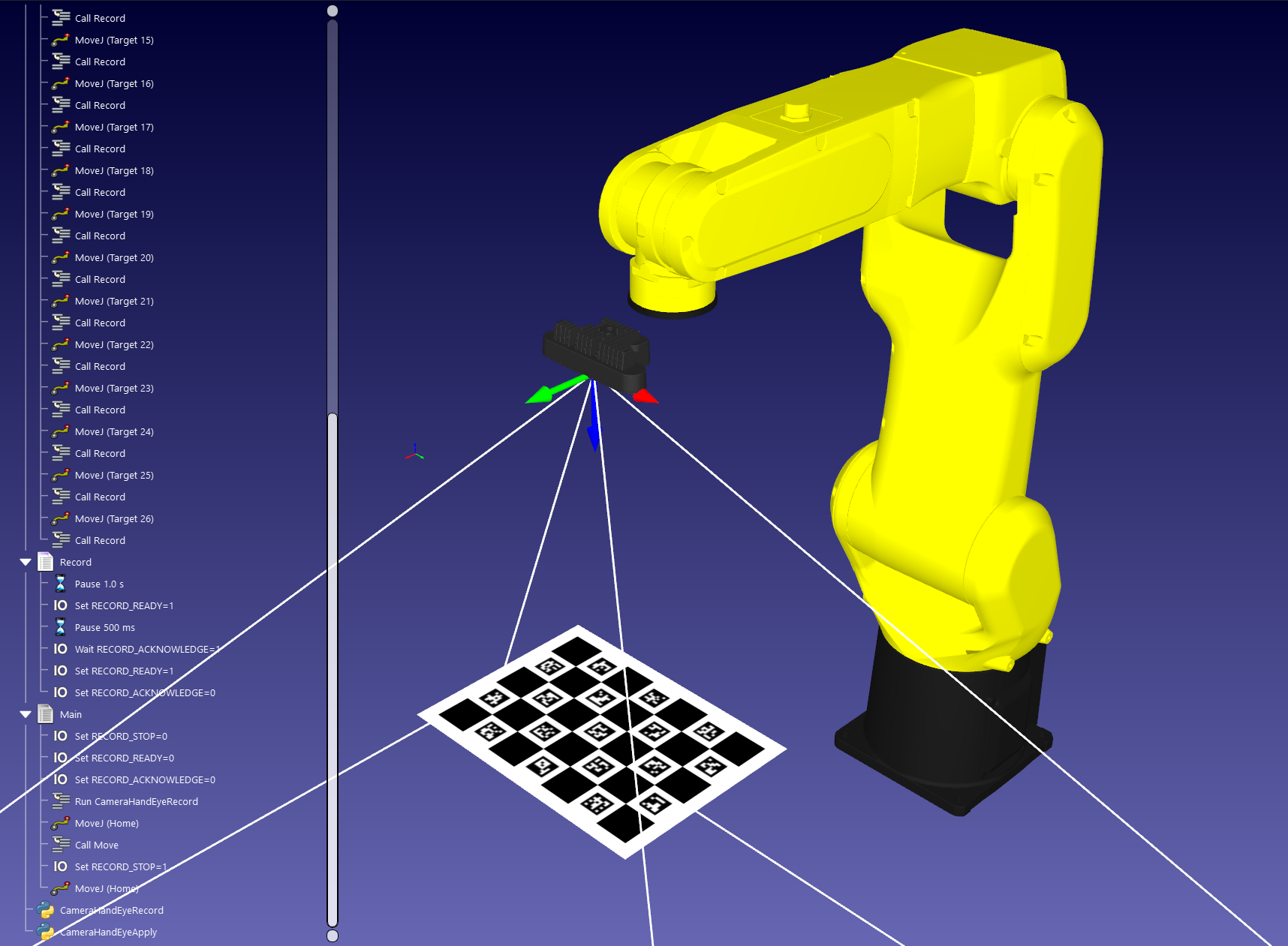
Puede encontrar un ejemplo completamente funcional en la sección de ejemplos de la API de RoboDK para Python: https://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration.