Mecanizado de robots en RoboDK
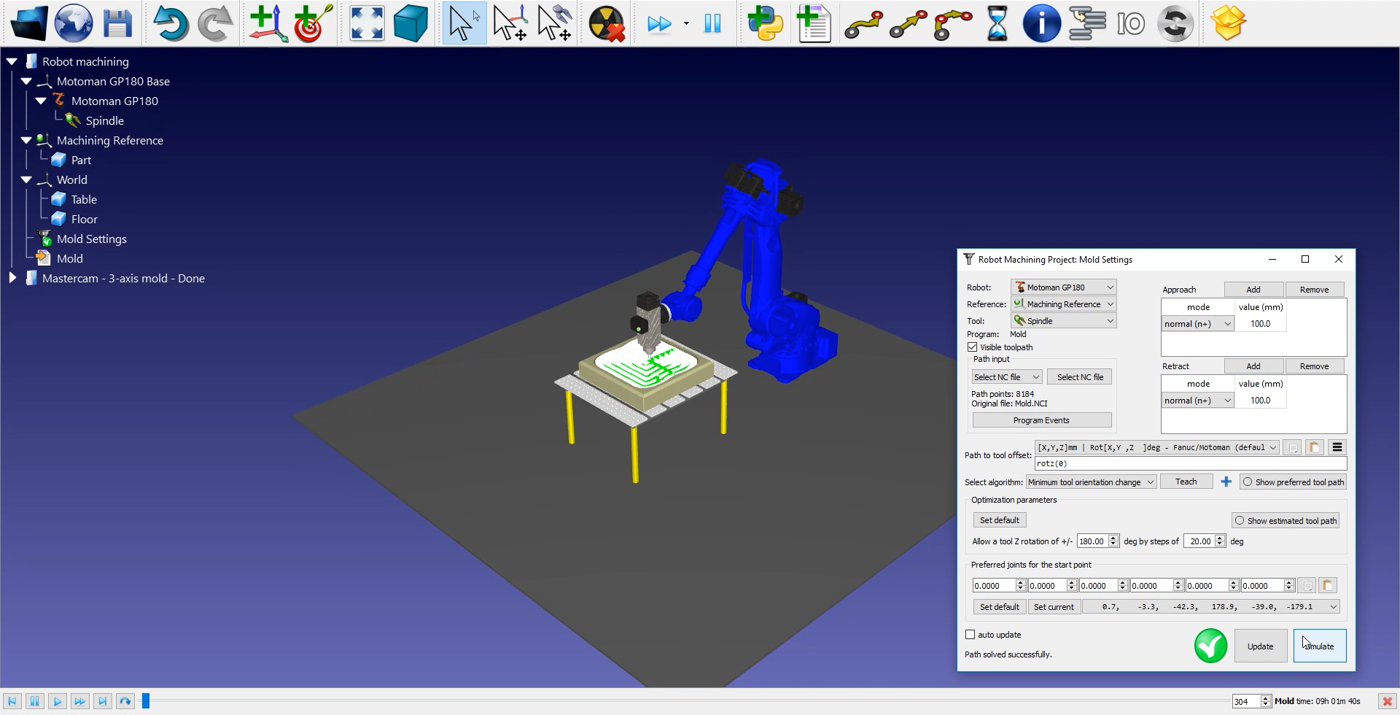
Una vez importada la trayectoria de mecanizado del robot en RoboDK, debería ver la trayectoria de mecanizado del robot unida a la referencia del molde de su estación RoboDK. En
También puede ajustar el valor de los movimientos de aproximación y retroceso antes y después de la trayectoria de corte. Un valor de 100 mm debería estar bien en este ejemplo. Si existe riesgo de colisiones, puede aumentarlos tanto como desee dentro del rango de trabajo del robot.
El siguiente paso es verificar si el orden en el que se ejecutarán las secciones de la trayectoria es correcto seleccionando

Siga estos pasos para ajustar la orientación de la herramienta:
1.Haga doble clic en
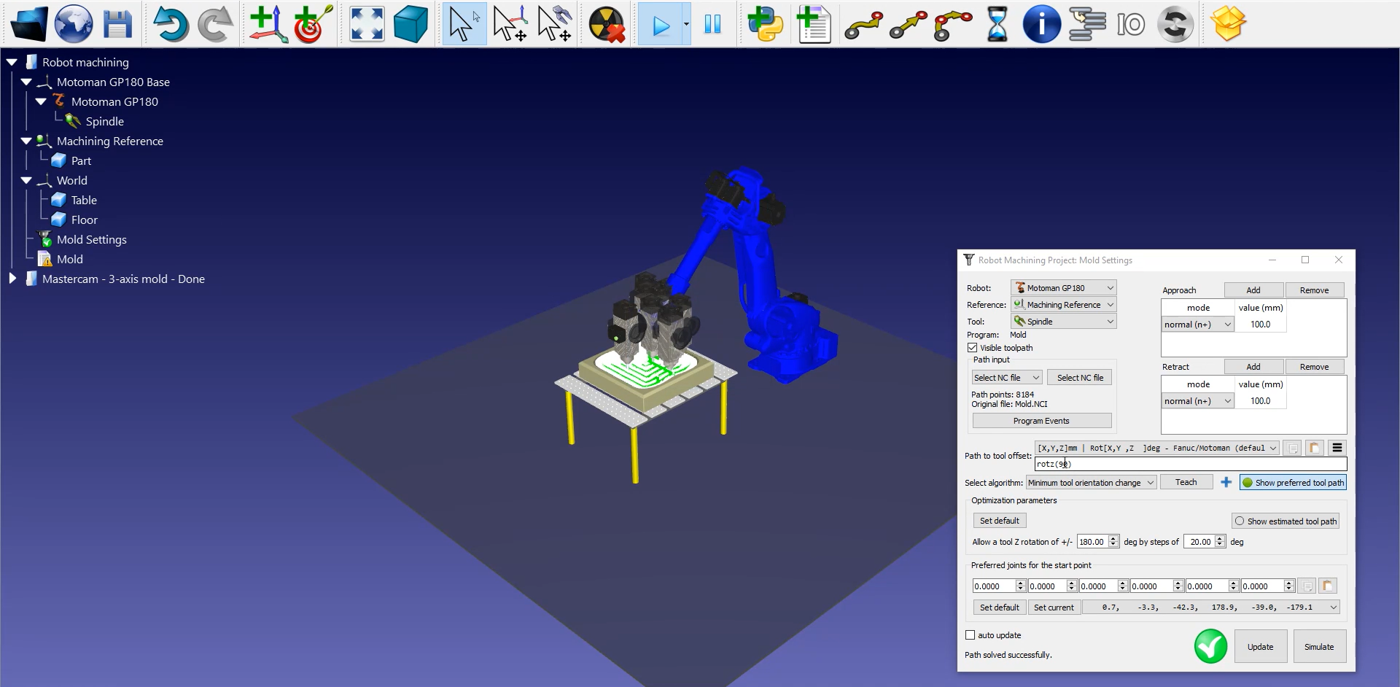
2.Seleccione Mostrar ruta de herramienta preferida. Aparecerán algunas herramientas fantasma como se muestra en la imagen inferior. Éstas representan la posición de su herramienta a lo largo de la trayectoria.
3.Modifique el valor rotz (0) desplazando su rueda hacia arriba hasta 90 grados. Verá que el valor rotz cambia y que la posición de los peajes fantasma cambia con él.
4.Seleccione Actualizar➔ Simular.
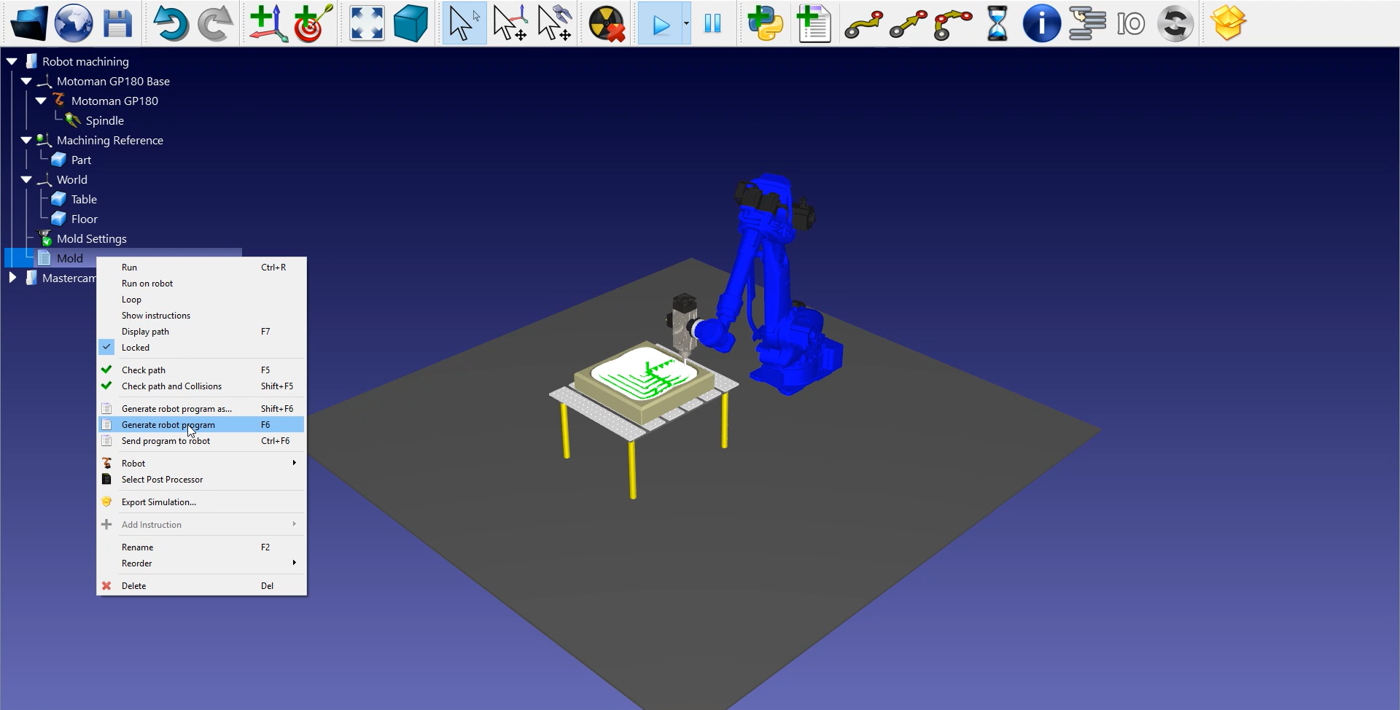
Para generar el programa de su robot, asegúrese de utilizar el postprocesador adecuado. Haga doble clic en el robot
Por último, haga clic con el botón derecho del ratón en
El archivo JBI de Motoman ya está listo para ser transferido al controlador de su robot.