Mold Machining
Introducción
Este ejemplo le ayudará a crear un sencillo proyecto de mecanizado de 3 ejes en RoboDK utilizando el plugin Mastercam. En este ejemplo se simula un robot Motoman con una herramienta de corte y se programa para mecanizar un molde sencillo utilizando el robot como máquina de 3 ejes. Aprenderá a transformar un programa CNC en una simulación de robot y en un programa de robot.
Vídeo: Programación de robots con Mastercam para una aplicación de mecanizado de moldes de 3 ejes
Con el plug-in RoboDK para Mastercam puede configurar rápidamente proyectos de mecanizado de robots directamente desde Mastercam a RoboDK. Este plug-in le permite programar más de 50 fabricantes de robots diferentes y 500 robots directamente desde Mastercam.
El plug-in RoboDK para Mastercam es compatible con NCI (archivos nativos preprocesados de Mastercam) y archivos APT CLS y G-code estándar. El plug-in es gratuito si ha adquirido una licencia de RoboDK.
Mecanizado robotizado de moldes en 3 ejes
Para iniciar el proyecto, primero tendrá que seleccionar el ejemplo de mecanizado de moldes de 3 ejes de RoboDK en la biblioteca por defecto.
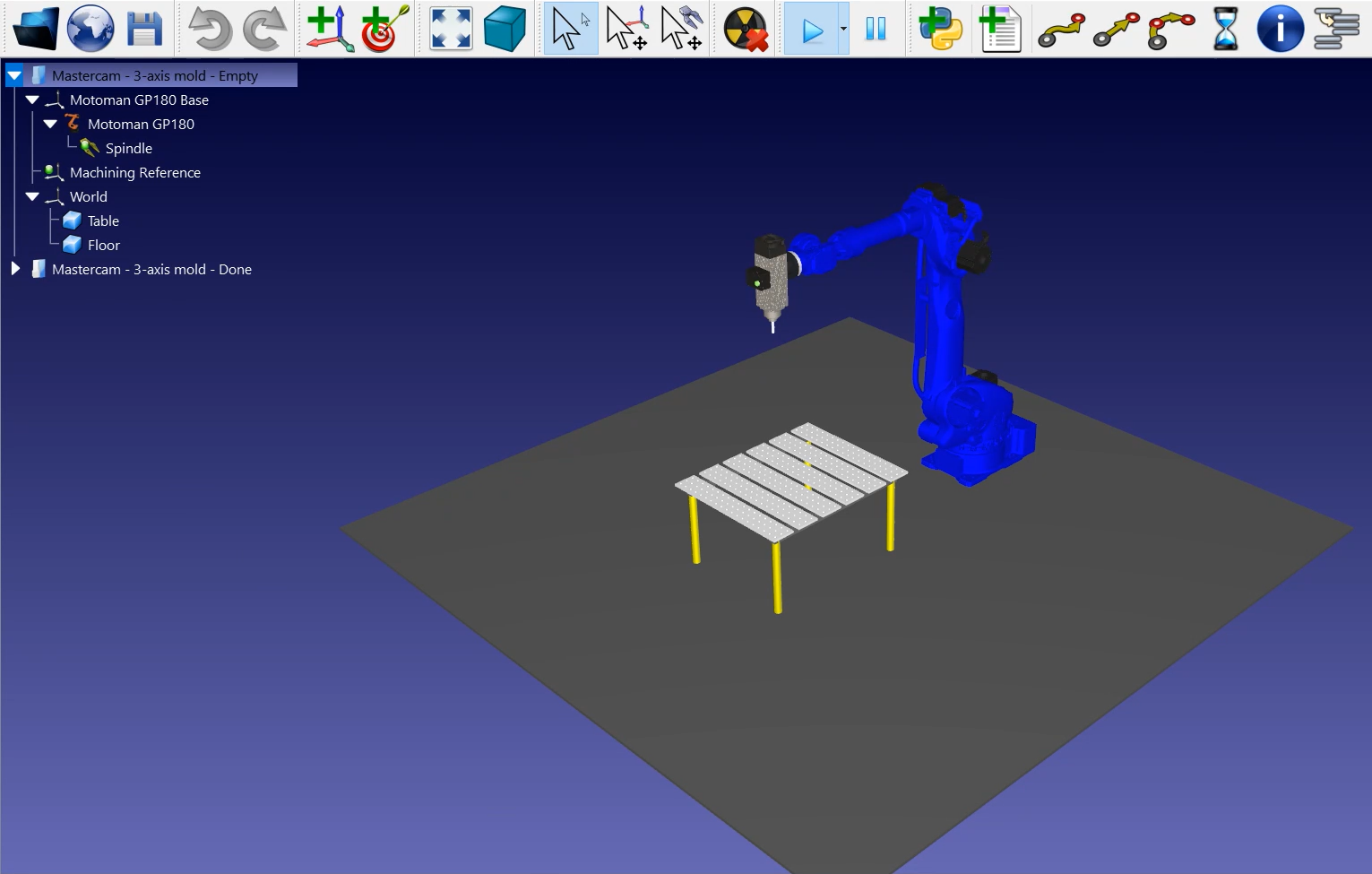
Ajustes de RoboDK
Este ejemplo utiliza el robot Motoman GP180, una herramienta de corte montada en un husillo y una mesa para sujetar la pieza en su sitio.
Cargue la estación:
1.Seleccione Archivo ➔
2.Localice el ejemplo de mecanizado de moldes de 3 ejes en la sección de ejemplos de RoboDK:
C:/RoboDK/Ejemplos/ Plugin-Mastercam-3-Axis-Mecanizado de moldes.rdk.
Ahora que ha cargado la estación puede abrir Mastercam y cargar el proyecto desde C:/RoboDK/Other/Plugin-Mastercam/Examples/Mold.mcam.
Trayectoria de herramienta de mecanizado en Mastercam
Abra su objeto 3D en Mastercam e inicie la simulación de corte. En este ejemplo, el objeto 3D es una pieza de metal de molde con una trayectoria de corte ya creada con herramientas Mastercam
Para simplificar este ejemplo, se ha reducido mucho el número de pasadas necesarias para mecanizar esa pieza. En realidad, tendría muchas más líneas o trayectorias de corte en el molde que no le permitirían ver realmente la herramienta en acción.
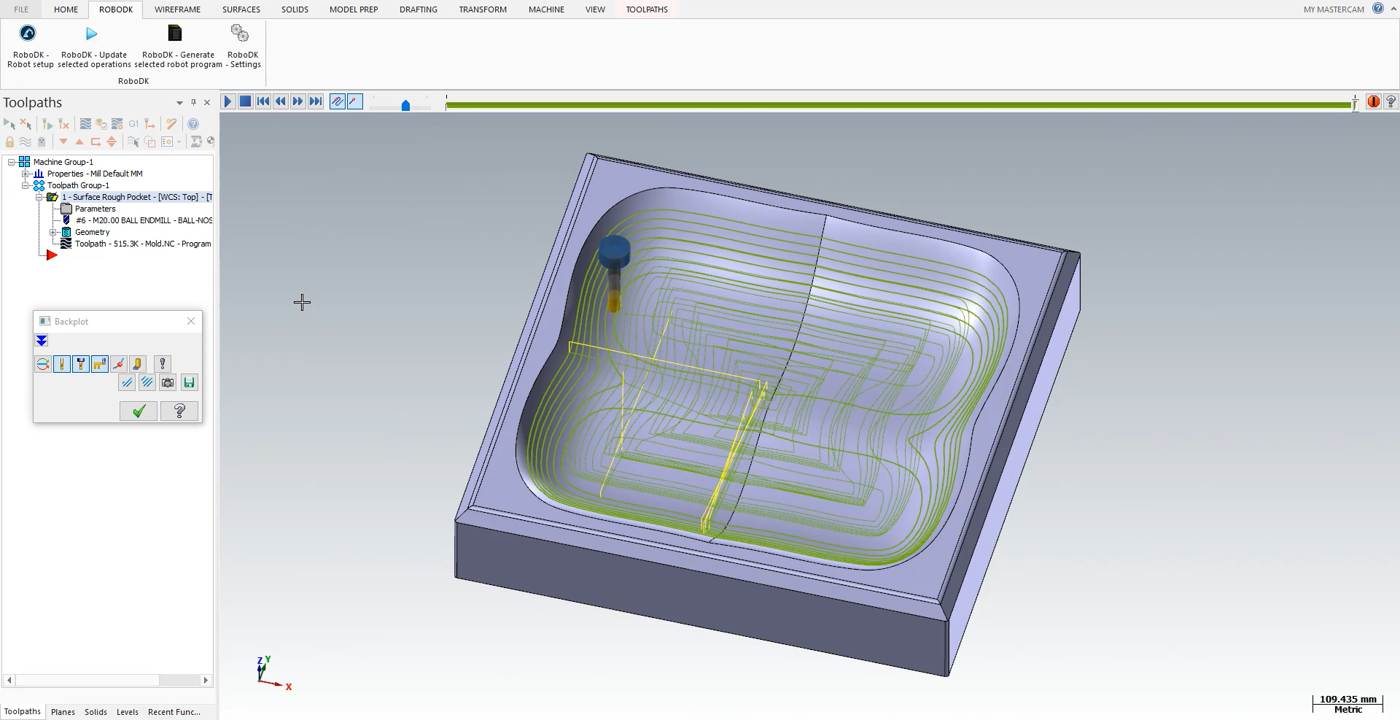
La simulación de corte de Mastercam le muestra todos los movimientos que debe realizar la herramienta durante el programa.
Siga los pasos siguientes para cargar su pieza en el RoboDK:
1.Seleccione la pestaña RoboDK y seleccione RoboDK - Configuración del robot.
2.Seleccione Cargar pieza.
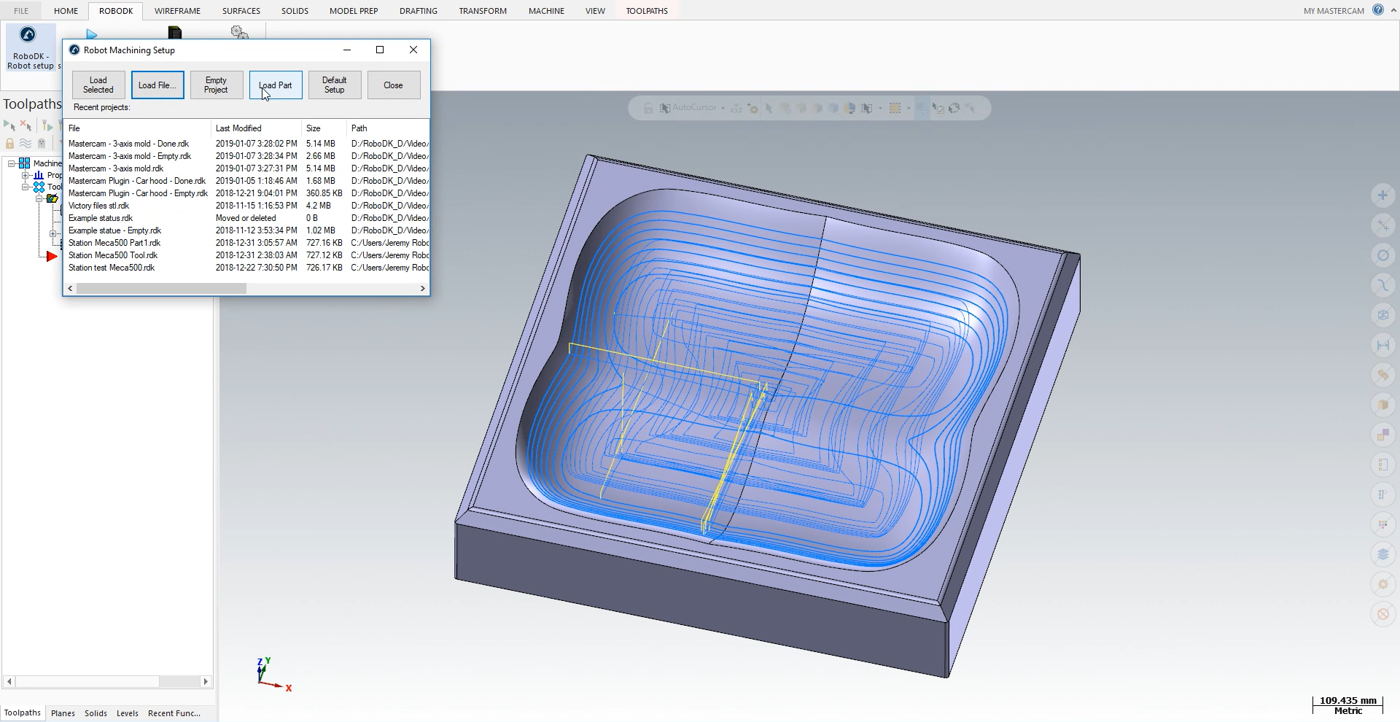
Debería ver la pieza cargada en el sistema de coordenadas activo (Referencia de mecanizado) en la mesa de la estación RoboDK.
El siguiente paso es importar la trayectoria de corte de Mastercam a RoboDK.
1.Seleccione la pestaña RoboDK en Mastercam.
2.Seleccionar RoboDK - Actualizar las operaciones seleccionadas.
3.Vaya a RoboDK.
Mecanizado robotizado en RoboDK
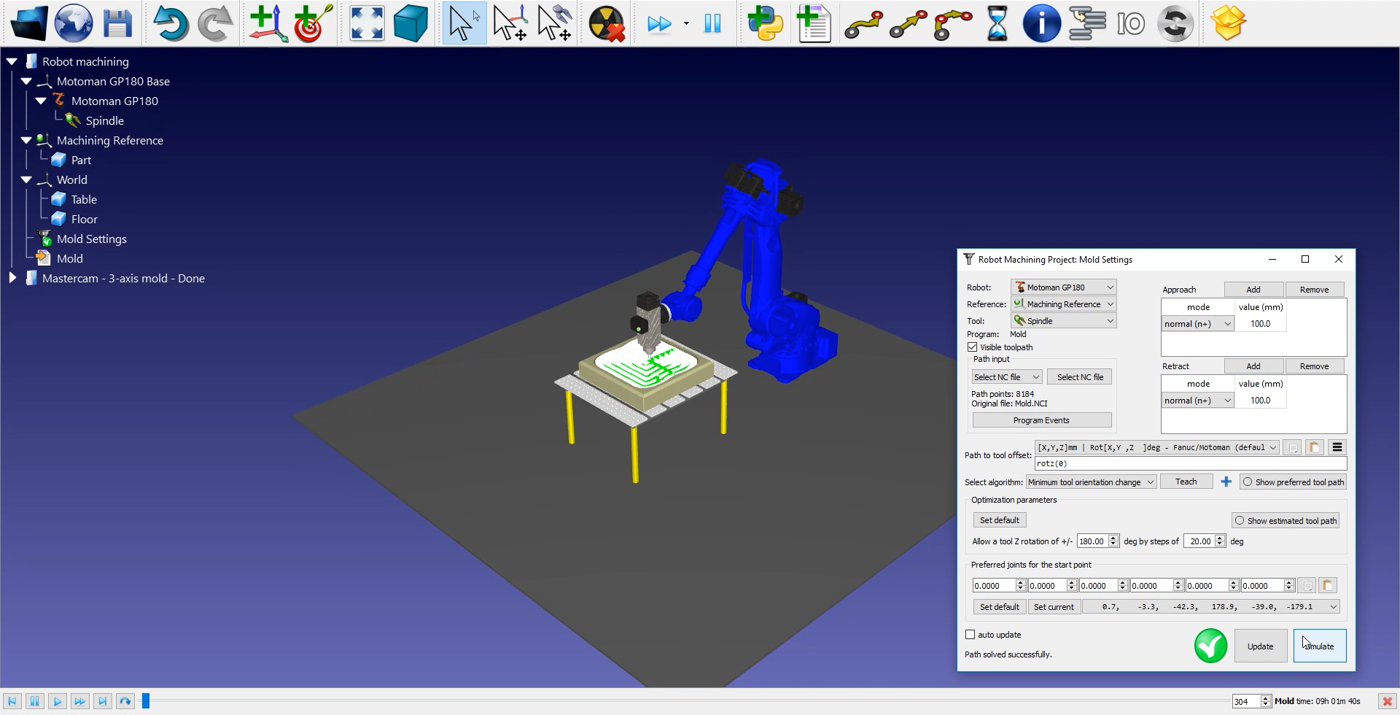
Una vez importada la trayectoria de mecanizado del robot en RoboDK, debería ver la trayectoria de mecanizado del robot unida a la referencia del molde de su estación RoboDK. En
También puede ajustar el valor de los movimientos de aproximación y retroceso antes y después de la trayectoria de corte. Un valor de 100 mm debería estar bien en este ejemplo. Si existe riesgo de colisiones, puede aumentarlos tanto como desee dentro del rango de trabajo del robot.
El siguiente paso es verificar si el orden en el que se ejecutarán las secciones de la trayectoria es correcto seleccionando

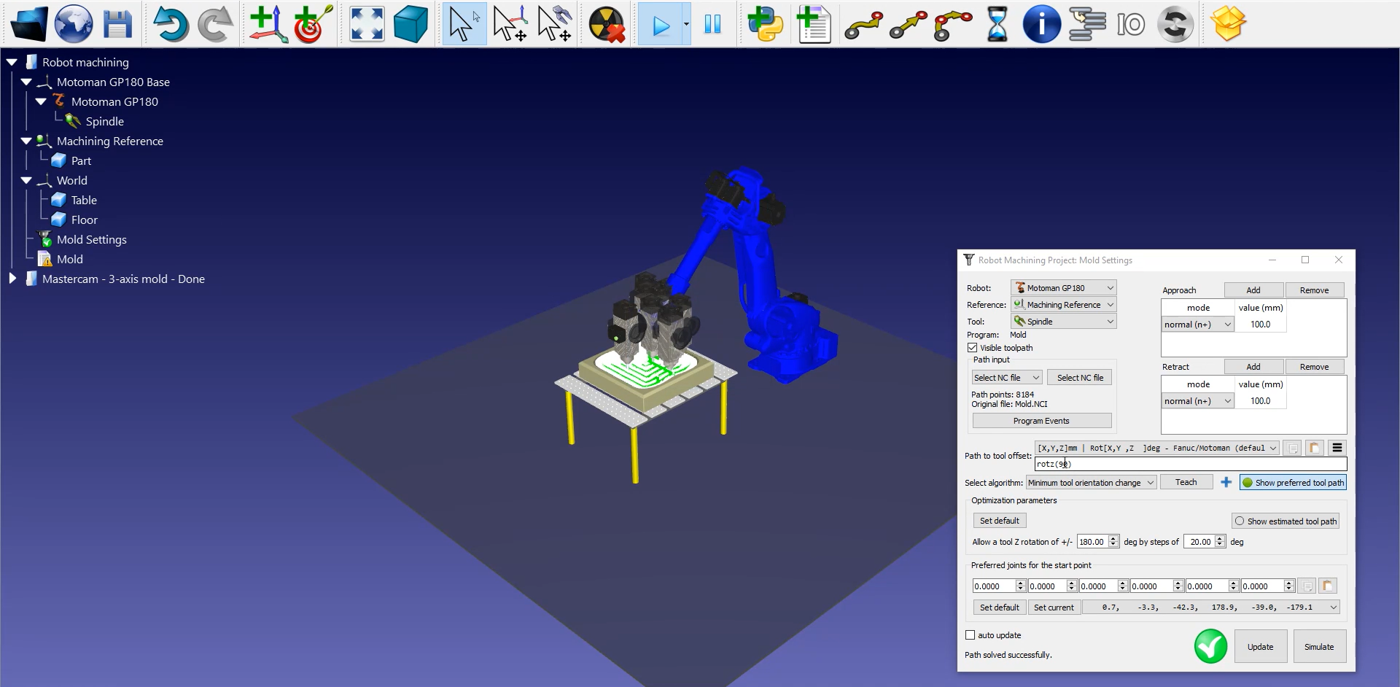
Siga estos pasos para ajustar la orientación de la herramienta:
1.Haga doble clic en
2.Seleccione Mostrar ruta de herramienta preferida. Aparecerán algunas herramientas fantasma como se muestra en la imagen inferior. Éstas representan la posición de su herramienta a lo largo de la trayectoria.
3.Modifique el valor rotz (0) desplazando su rueda hacia arriba hasta 90 grados. Verá que el valor rotz cambia y que la posición de los peajes fantasma cambia con él.
4.Seleccione Actualizar➔ Simular.
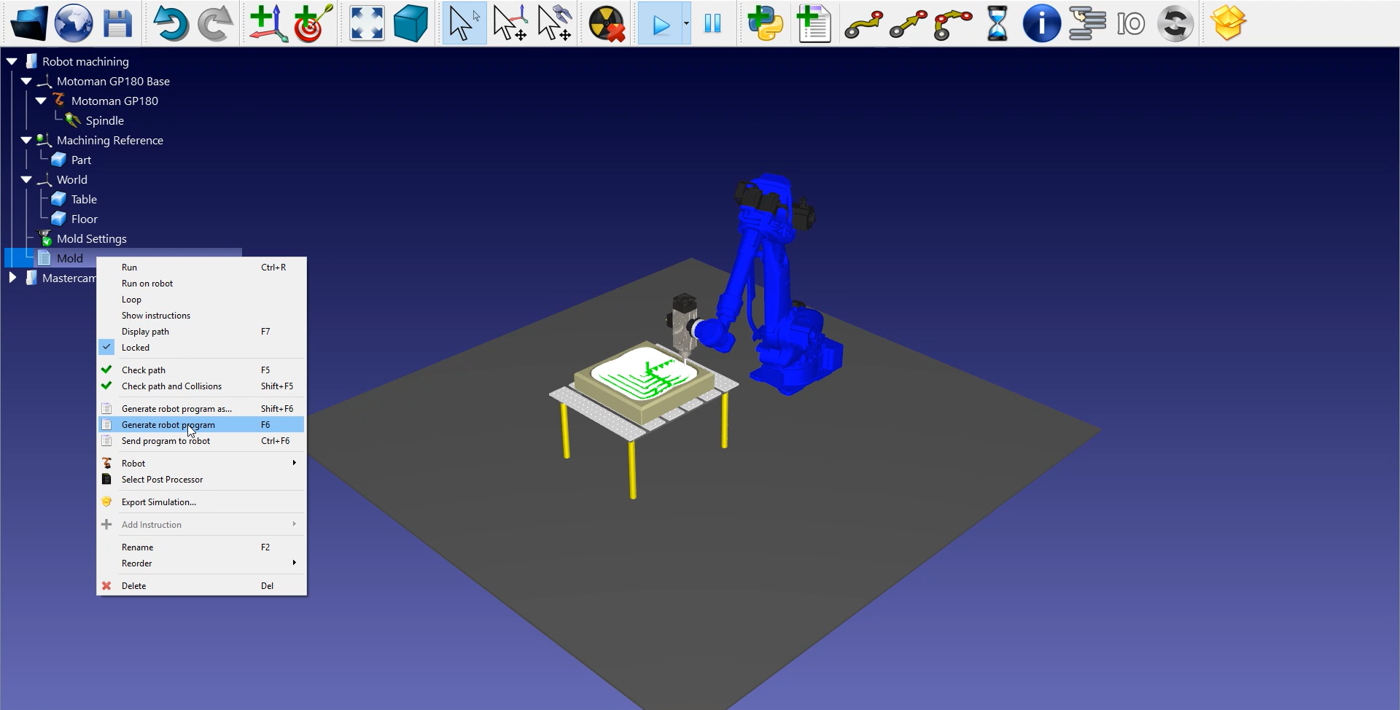
Para generar el programa de su robot, asegúrese de utilizar el postprocesador adecuado. Haga doble clic en el robot
Por último, haga clic con el botón derecho del ratón en
El archivo JBI de Motoman ya está listo para ser transferido al controlador de su robot.