Crear trayectoria de mecanizado de robot
Puede crear la simulación de mecanizado del robot en RoboDK una vez que haya cargado el archivo APT seleccionando Actualizar. Esto le permite ver si el robot puede realizar la operación de fabricación.
Este ejemplo es una simple operación de mecanizado de 3 ejes, y los ajustes por defecto nos dan un resultado válido. El proyecto de mecanizado robotizado le permite controlar cómo se comporta el robot a lo largo de la trayectoria de la herramienta de mecanizado.
Puede seguir estos pasos para actualizar el resto de operaciones de mecanizado del robot:
1.Seleccione una o varias operaciones de mecanizado robotizadas (si mantiene pulsada la tecla Mayús. podrá generar varios elementos en el árbol).
2.Haga clic con el botón derecho del ratón en el elemento o elementos seleccionados.
3.Seleccione Actualizar programas.
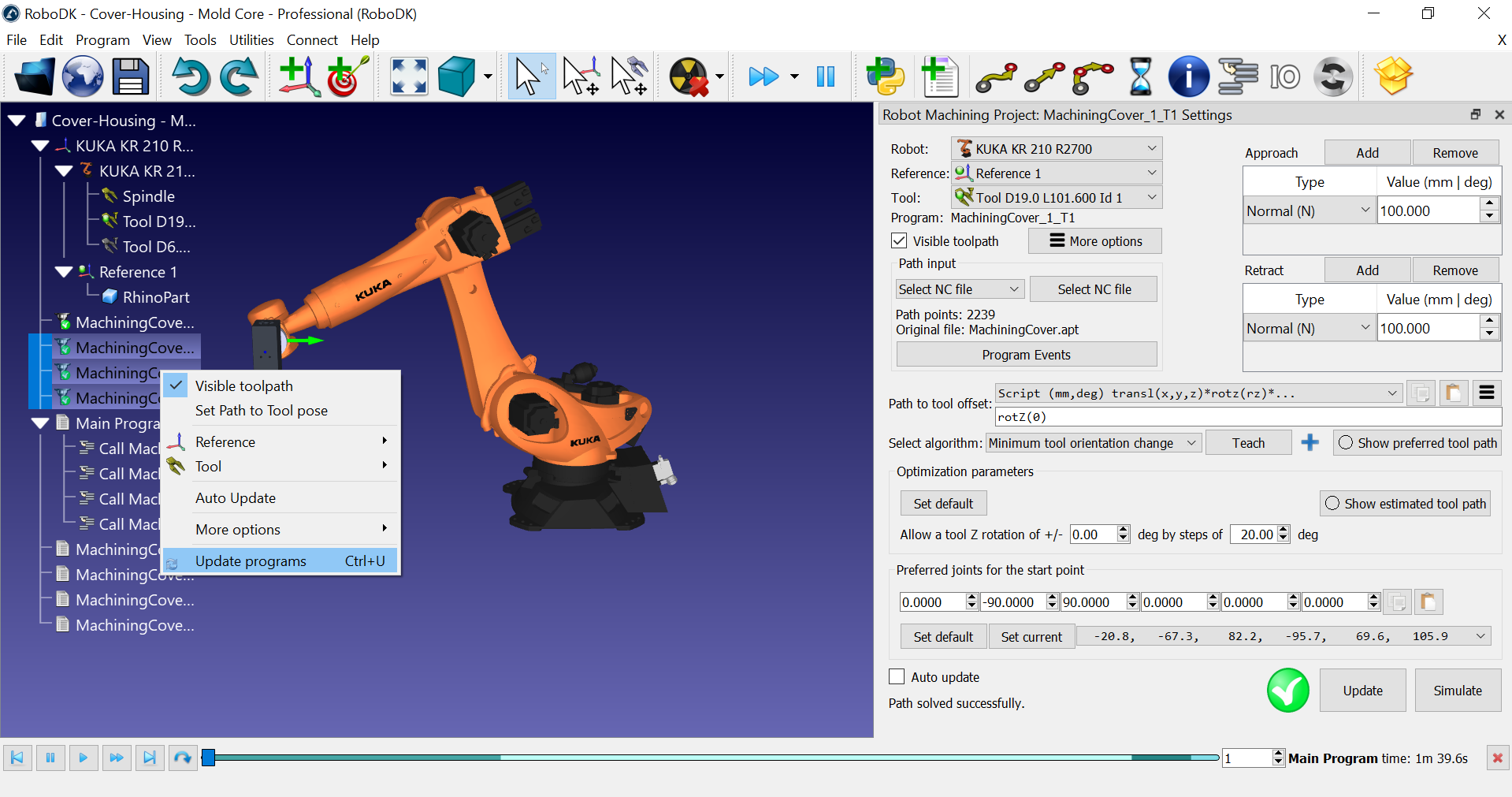
A medida que RoboDK calcula la trayectoria de mecanizado del robot, creará un nuevo programa de robot para cada operación de mecanizado. Los iconos blancos representan programas de robot. Estos programas son creados automáticamente por RoboDK. Puede simular cada programa individualmente haciendo doble clic sobre él en el árbol.
RoboDK también crea automáticamente un programa principal que puede ejecutar para simular todas las operaciones de mecanizado del robot en orden.