Generar los programas del robot
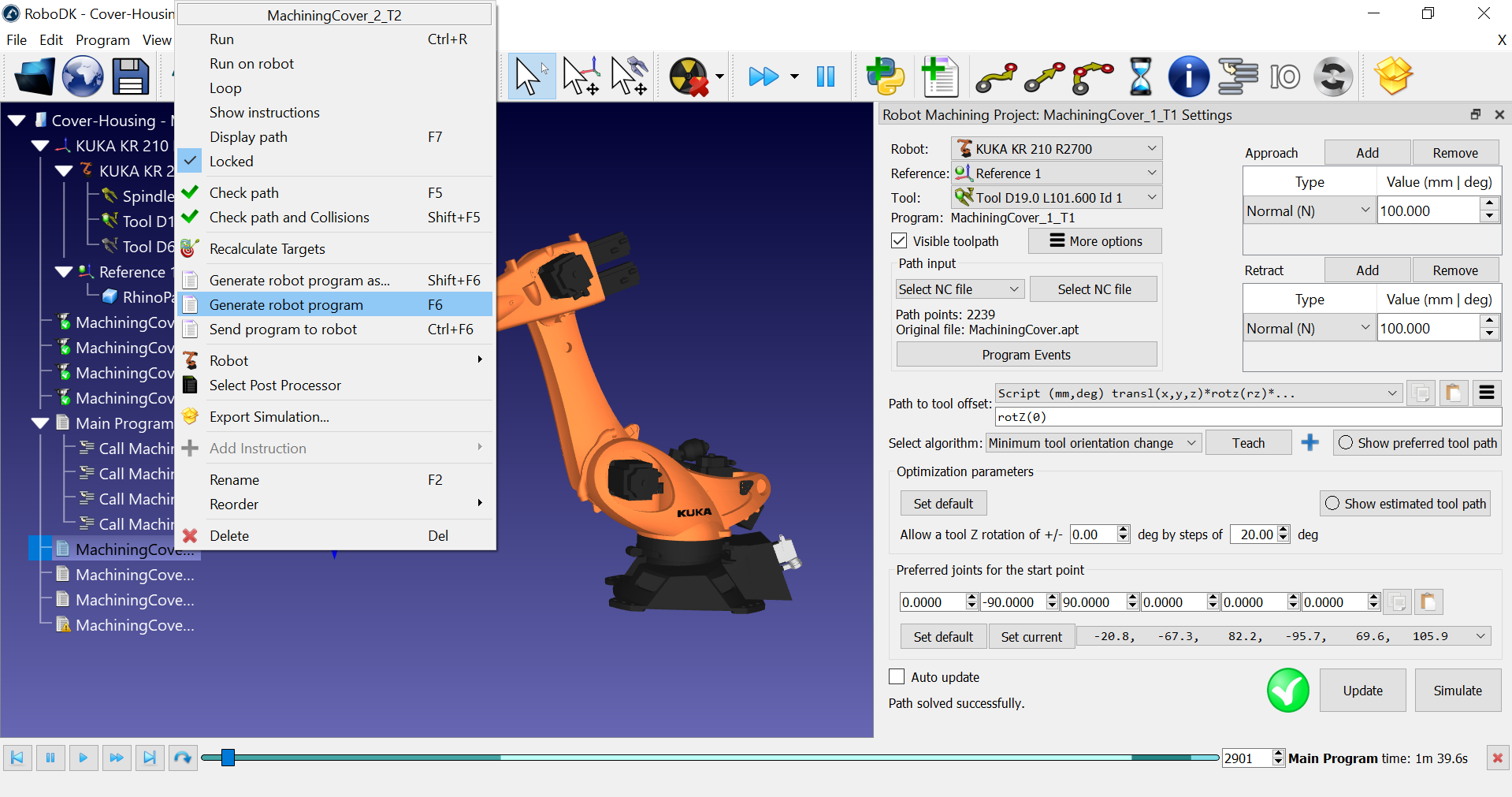
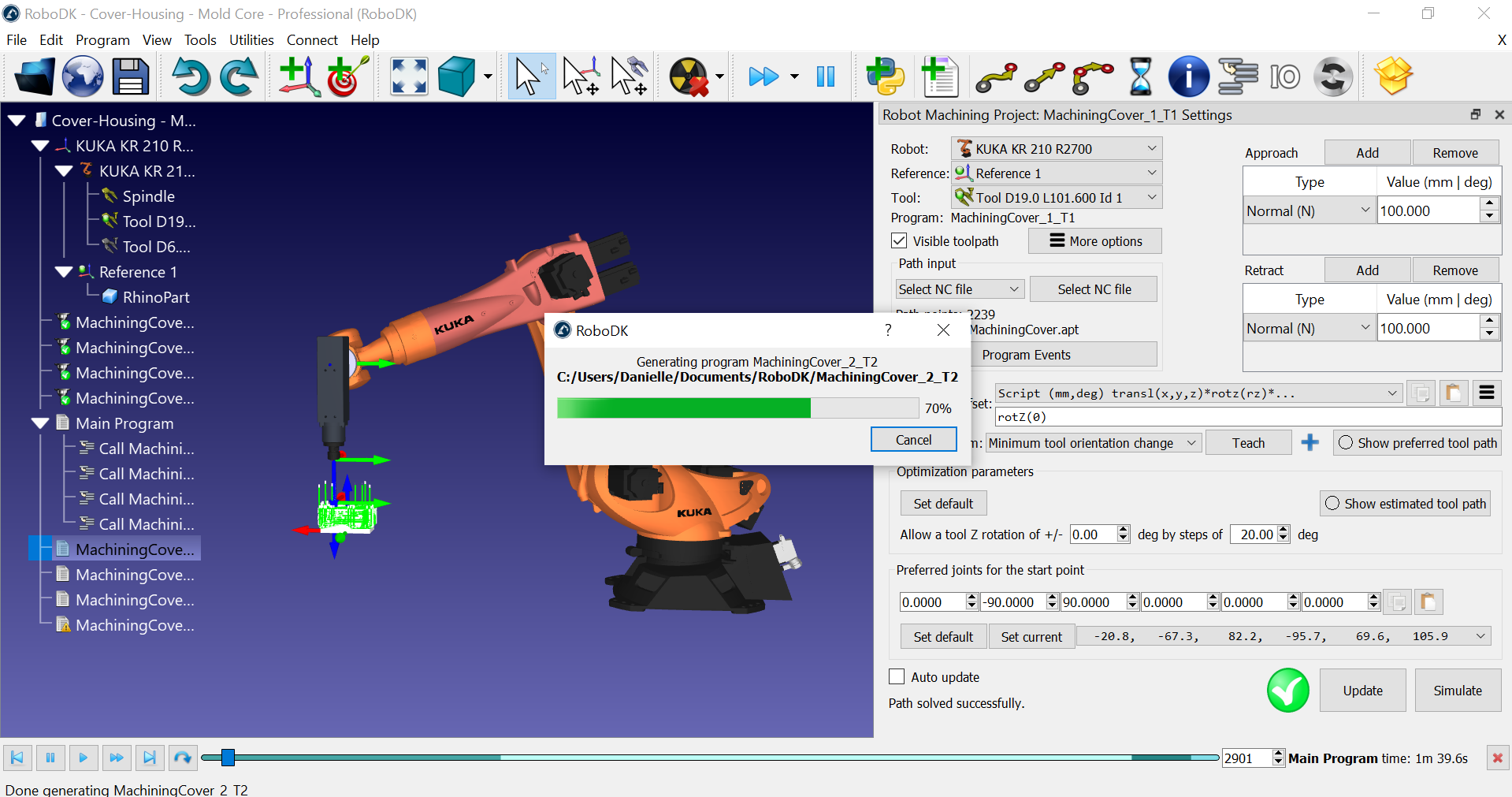
Puede hacer clic con el botón derecho en uno o varios programas y seleccionar Generar los programas del robot para generar o actualizar los programas (archivos) del robot para su controlador de robot.
En este ejemplo, si estamos utilizando un controlador de robot KUKA KRC obtendremos archivos de programa SRC.
Debería ver la referencia y la herramienta definidas en el programa de la misma forma que las definió en RoboDK.
También puede utilizar la referencia numerada y los nombres de las herramientas para utilizar los valores almacenados en el controlador dado su ID.
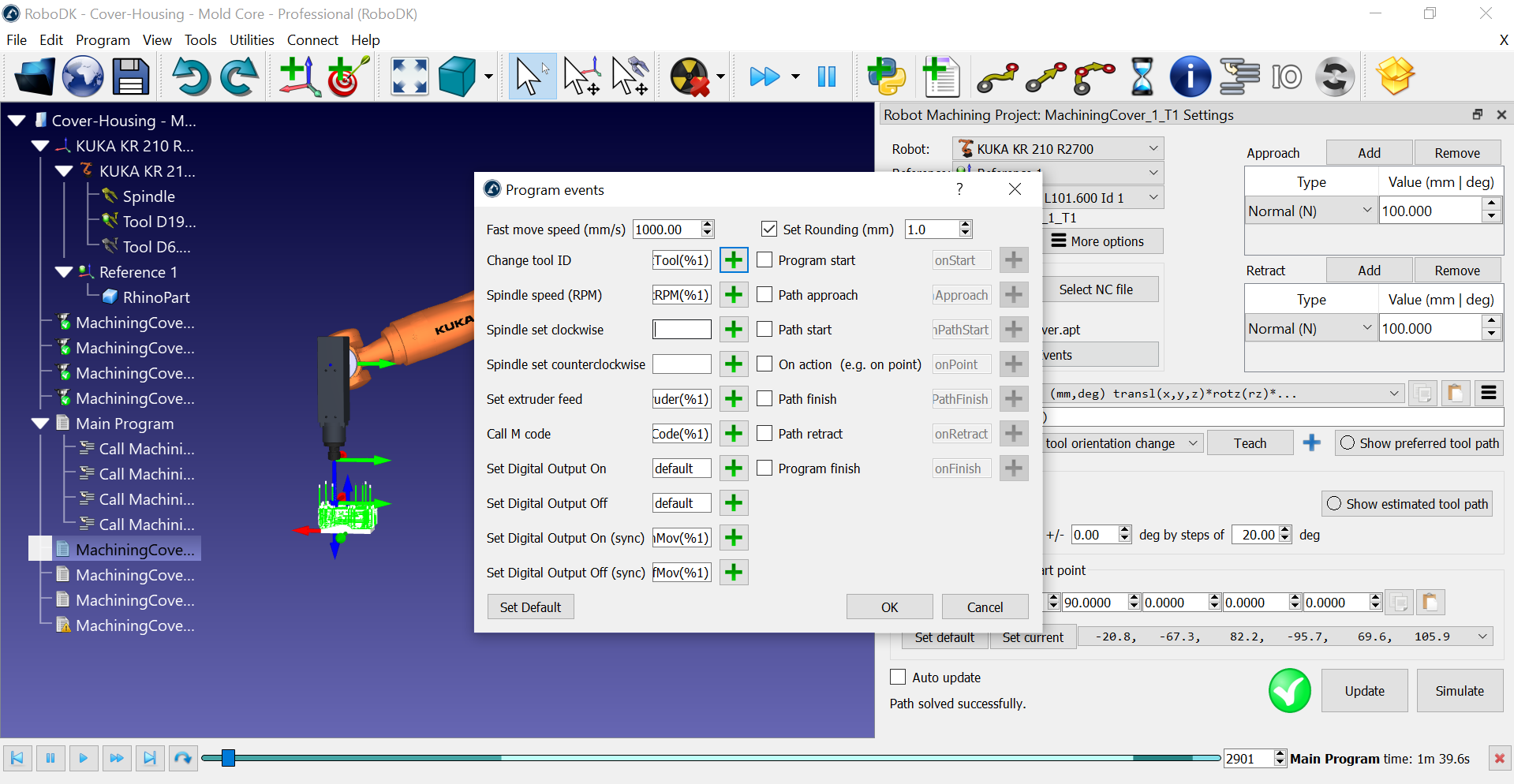
Puede ver llamadas de programa personalizadas para seleccionar la herramienta correcta según su ID de herramienta y activar el husillo. Estos ajustes pueden personalizarse en el menú Eventos de programa. Puede activar un procedimiento especial en el controlador de su robot cuando deba ejecutarse un determinado comando de mecanizado, como cambiar la herramienta, la velocidad del husillo o ejecutar códigos M.