Personalizar la orientación de la herramienta
La mayoría de las operaciones de mecanizado o fabricación implican una restricción de 5 ejes. Mientras que la posición de la herramienta (TCP) y el eje de corte están definidos, dispone de un grado de libertad adicional para definir cuando utiliza un brazo robótico de 6 ejes. Este grado de libertad nos permite girar alrededor del eje de corte y evitar automáticamente las singularidades y los límites de los ejes.
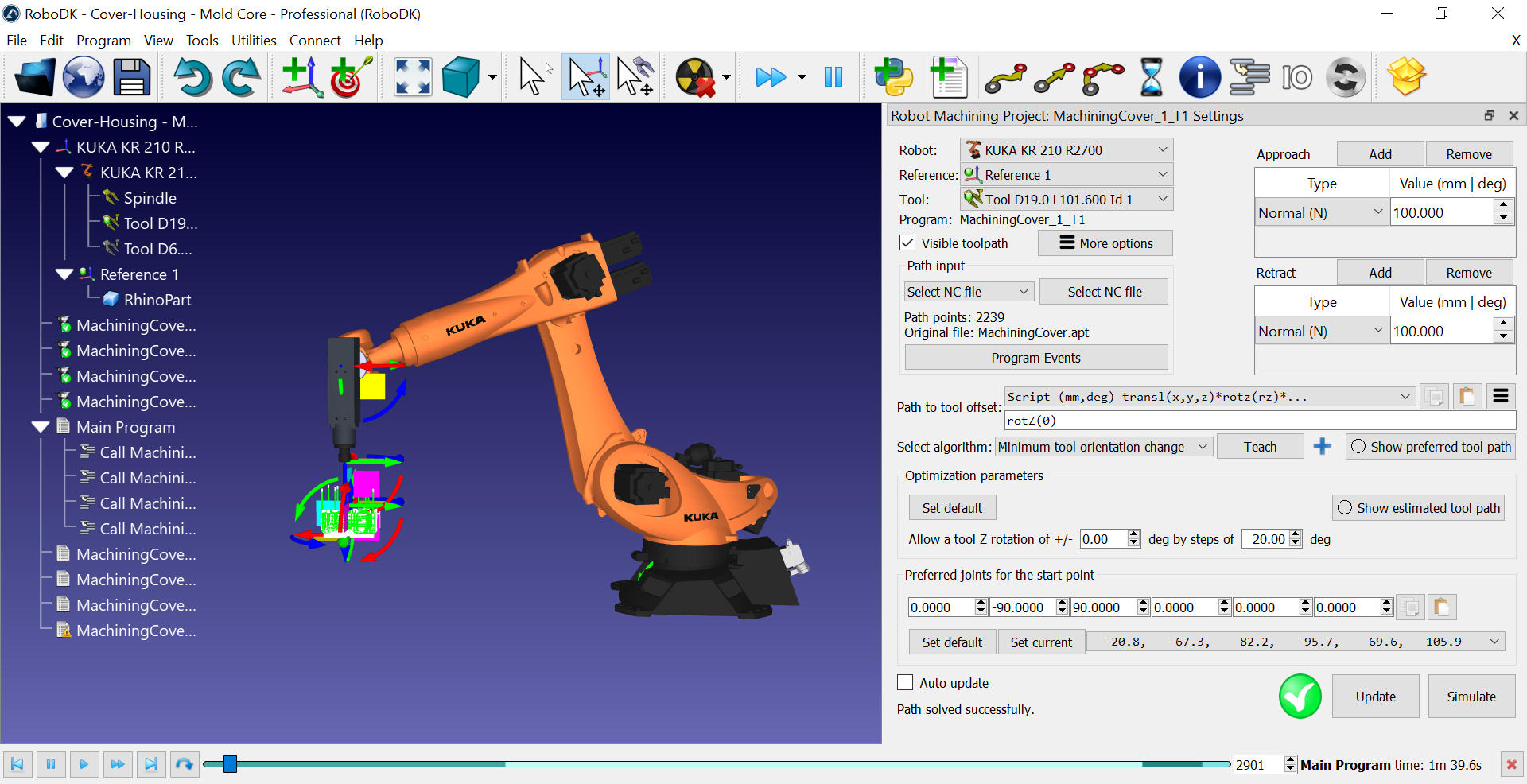
La forma más sencilla de personalizar la orientación de la herramienta es seleccionando el botón Enseñar en el proyecto de mecanizado del robot. Al seleccionar Enseñar, le está diciendo al RoboDK que desea seguir la orientación actual de la herramienta, de modo que los ajustes se adaptarán para coincidir con esa orientación.
Al seleccionar Mostrar trayectoria de herramienta preferida podemos previsualizar la orientación de la herramienta que el robot intenta seguir.
Puede seleccionar Actualizar y Simular para ver el resultado.
Los parámetros de optimización permiten al robot cambiar automáticamente la orientación de la herramienta si no puede conseguir la orientación preferida. Este parámetro es importante si tiene una pieza grande, si está trabajando cerca de una singularidad o cerca de los límites del espacio de trabajo del robot. Si ve una marca roja significa que el robot no puede realizar la operación.
Si selecciona Mostrar trayectoria estimada de la herramienta debería ver en verde las posiciones que son alcanzables. Le dará una pista sobre cómo será la orientación para que la trayectoria sea factible. Esto significa que estamos utilizando el grado de libertad adicional para evitar automáticamente las singularidades del robot y los límites de los ejes.