Programa de mecanizado en RhinoCAM
Esta sección muestra cómo puede exportar un trabajo de mecanizado desde el software RhinoCAM de Mecsoft a RoboDK. Se utiliza un archivo APT para cargar la trayectoria de la herramienta en RoboDK y se envía automáticamente utilizando un archivo BAT personalizado.
Siga estos pasos en RhinoCAM para exportar el trabajo de mecanizado a RoboDK:
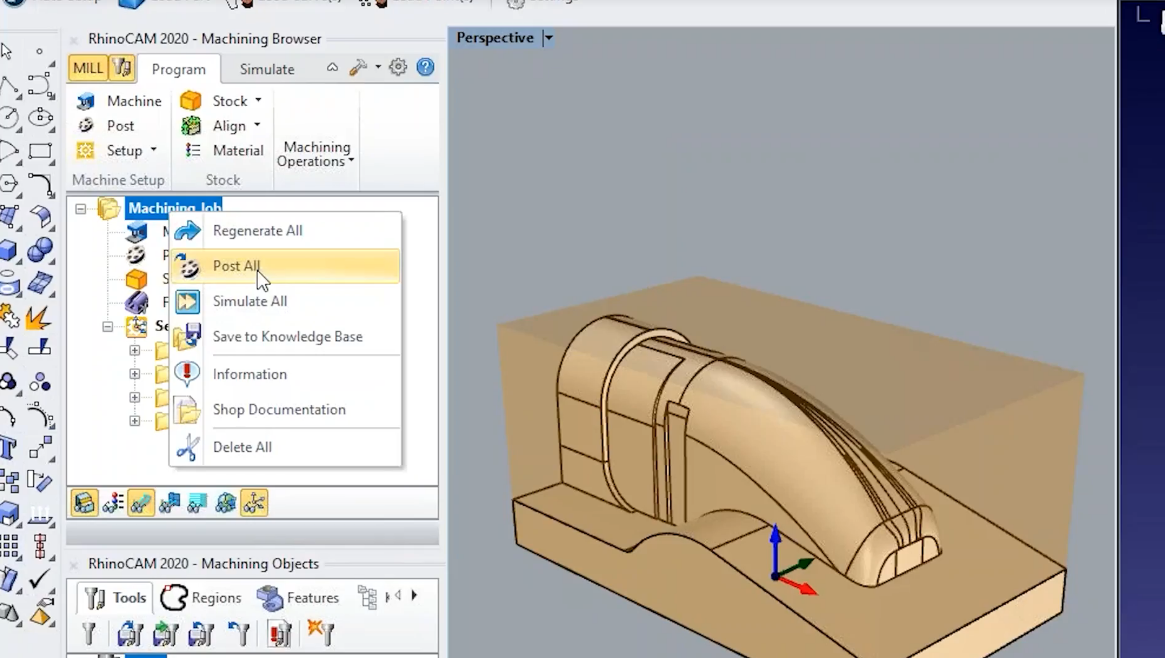
1.Haga clic con el botón derecho en su proyecto de trabajo de mecanizado desde RhinoCAM.
2.Seleccione Publicar todo para generar los programas de mecanizado y cargarlo todo automáticamente en RoboDK.
Puede ver que RoboDK divide automáticamente el programa de mecanizado del robot en las mismas 4 operaciones de mecanizado que creamos en el software CAM.
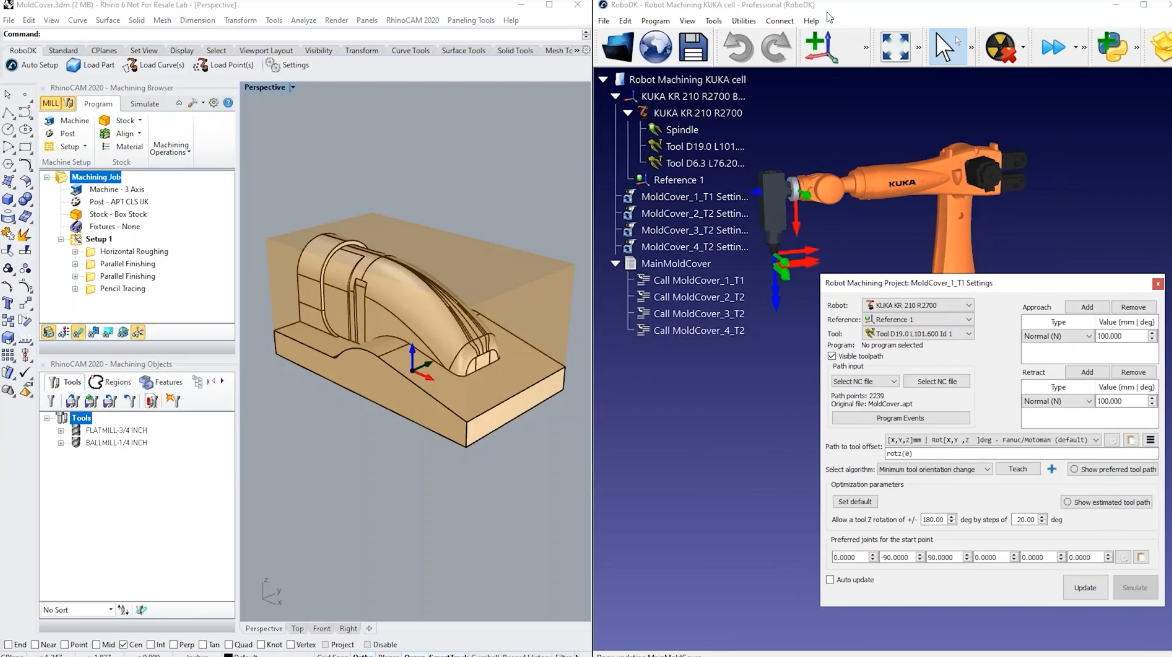
El proyecto de mecanizado del robot se crea utilizando una célula de robot predeterminada que podemos personalizar. En este ejemplo utilizamos un robot KUKA y un husillo por defecto en el que la herramienta (o TCP) representa el portaherramientas.
Por defecto, al cargar programas APT, RoboDK añadirá las herramientas que defina en su proyecto de mecanizado. Las herramientas se añadirán a su TCP activo cuando cargue el archivo APT. También se preseleccionarán las herramientas correctas en su proyecto de mecanizado del robot.